TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025015593
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2024197582,2023163615
出願日
2024-11-12,2020-10-20
発明の名称
表示システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/14 20200101AFI20250123BHJP(車両一般)
要約
【課題】自律的な車線変更の実施の可否を適切な態様でドライバに伝える。
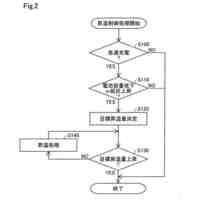
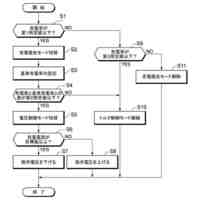
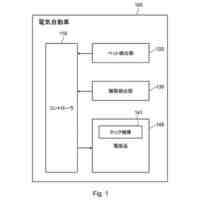
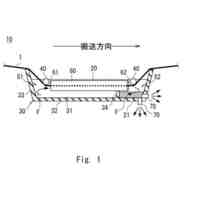
【解決手段】自動運転システム1は、車両20の速度を検出する車速検出装置8と、車両の走行車線及び隣接車線を表示可能な表示装置9と、表示装置の表示内容を制御する表示制御部15と、車両の自律的な車線変更を実施する車両制御部16とを備える。車両制御部は、車両の速度が所定値未満であるときには車両の自律的な車線変更を禁止する。表示制御部は、自律的な車線変更が禁止されているときには隣接車線を非表示にするが、車両が自律的な車線変更のために所定値未満の速度から所定値以上の速度まで加速することが予定されている場合には、車両の速度が所定値に達する前に、隣接車線の表示を開始する。
【選択図】図7
特許請求の範囲
【請求項1】
車両の走行車線及び隣接車線を表示可能な表示装置と、
前記表示装置の表示内容を制御する表示制御部と
を備え、
前記表示制御部は、
前記車両の自律的な車線変更が禁止されているときには前記隣接車線を非表示にし、
前記走行車線の両側に前記隣接車線が存在する場合に前記自律的な車線変更が実施されるときには前記走行車線及び車線変更先の車線のみを表示する、車両の表示システム。
続きを表示(約 410 文字)
【請求項2】
前記表示制御部は、前記車両の自律的な車線変更が許可されているときには前記隣接車線を表示する、請求項1に記載の車両の表示システム。
【請求項3】
前記車両の速度が所定値未満であるときには、該車両の自律的な車線変更が禁止され、
前記表示制御部は、前記車両が前記自律的な車線変更のために前記所定値未満の速度から該所定値以上の速度まで加速することが予定されている場合には、該車両の速度が該所定値に達する前に、前記隣接車線の表示を開始する、請求項1又は2に記載の車両の表示システム。
【請求項4】
前記表示制御部は、前記車両が前記自律的な車線変更のために前記所定値未満の速度から該所定値以上の速度まで加速することが予定されている場合には、該車両の速度が該所定値に達する前に、前記隣接車線のうち車線変更先の車線の表示を開始する、請求項3に記載の車両の表示システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は自動運転システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、自律走行可能な車両のドライバに周囲の情報を与えるために、車両に搭載された車両検出装置によって検出された他車両等を車内の表示装置に表示することが知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2017-187982号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年開発されてきている自律走行可能な車両では、所定の条件下でのみ自律的な車線変更が許可されることが多い。例えば、車両の速度が所定値以上であるときには自律的な車線変更が許可され、車両の速度が所定値未満であるときには自律的な車線変更が禁止される。
【0005】
このため、車両の走行中にドライバが自律的な車線変更の実施の可否を視認できること望ましい。例えば、自律的な車線変更が許可されているときには表示装置に隣接車線を表示し、自律的な車線変更が禁止されているときには表示装置上で隣接車線を非表示にすることが考えられる。
【0006】
しかしながら、自律的な車線変更が禁止されているときに隣接車線が常に非表示にされると、車両を加速させて車線変更を実施することが予定されている場合であっても、車両の速度が所定値に達するまで、隣接車線が非表示にされる。この結果、システムによる車線変更先の車線の認識結果をドライバに伝達するタイミングが遅れるおそれがある。
【0007】
上記課題に鑑みて、本発明の目的は、自律的な車線変更の実施の可否を適切な態様でドライバに伝えることにある。
【課題を解決するための手段】
【0008】
本開示の要旨は以下のとおりである。
【0009】
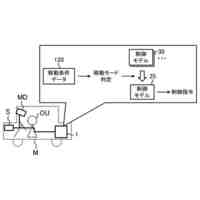
(1)車両の速度を検出する車速検出装置と、前記車両の走行車線及び隣接車線を表示可能な表示装置と、前記表示装置の表示内容を制御する表示制御部と、前記車両の自律的な車線変更を実施する車両制御部とを備え、前記車両制御部は、前記車両の速度が所定値未満であるときには該車両の自律的な車線変更を禁止し、前記表示制御部は、前記自律的な車線変更が禁止されているときには前記隣接車線を非表示にするが、前記車両が前記自律的な車線変更のために前記所定値未満の速度から該所定値以上の速度まで加速することが予定されている場合には、該車両の速度が該所定値に達する前に、前記隣接車線の表示を開始する、自動運転システム。
【0010】
(2)前記表示制御部は、前記車両が前記自律的な車線変更のために前記所定値未満の速度から該所定値以上の速度まで加速することが予定されている場合には、該車両の速度が該所定値に達する前に、前記隣接車線のうち車線変更先の車線の表示を開始する、上記(1)に記載の自動運転システム。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
単電池
7日前
トヨタ自動車株式会社
ロータ
8日前
トヨタ自動車株式会社
ロータ
15日前
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
接合装置
1日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
切替装置
7日前
トヨタ自動車株式会社
連結構造
4日前
トヨタ自動車株式会社
切替装置
7日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
連結車両
14日前
トヨタ自動車株式会社
充電方法
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
充電装置
7日前
トヨタ自動車株式会社
電動車両
7日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
分離装置
1日前
トヨタ自動車株式会社
レーダ装置
今日
トヨタ自動車株式会社
電気自動車
今日
トヨタ自動車株式会社
熱管理回路
14日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
配管保持構造
7日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
樹脂溶解装置
今日
トヨタ自動車株式会社
自動運転装置
今日
トヨタ自動車株式会社
後退支援装置
今日
トヨタ自動車株式会社
充電制御装置
1日前
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
車両側部構造
7日前
トヨタ自動車株式会社
給電システム
今日
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ