TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014819
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117686
出願日
2023-07-19
発明の名称
制御装置、巻取装置、制御システムの構築方法、制御システム、制御方法、プログラム、及び記憶媒体
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
G05B
13/02 20060101AFI20250123BHJP(制御;調整)
要約
【課題】制御対象からの制御量を、より目標値へ近づけることが可能な、制御装置、巻取装置、制御システムの構築方法、制御システム、制御方法、プログラム、及び記憶媒体を提供する。
【解決手段】実施形態に係る制御装置は、対象物を巻き取り可能な巻取機構を制御する。前記制御装置は、第1制御部と、第1演算部と、第2演算部と、を備える。前記第1制御部は、前記巻取機構から、制御される対象である制御量を取得する。前記第1制御部は、予め機械学習されたモデルに前記制御量を入力することで、前記制御量が前記巻取機構から出力される場合の操作量に相当する第1操作量を取得する。前記第1演算部は、前記第1操作量と、前記巻取機構に向けて送信される第2操作量と、の差分を算出する。前記第2演算部は、前記第2操作量に前記差分を加えた第3操作量を、前記巻取機構へ入力する。
【選択図】図1
特許請求の範囲
【請求項1】
対象物を巻き取り可能な巻取機構を制御する制御装置であって、
前記巻取機構から、制御される対象である制御量を取得し、予め機械学習されたモデルに前記制御量を入力することで、前記制御量が前記巻取機構から出力される場合の操作量に相当する第1操作量を取得する第1制御部と、
前記第1操作量と、前記巻取機構に向けて送信される第2操作量と、の差分を算出する第1演算部と、
前記第2操作量に前記差分を加えた第3操作量を、前記巻取機構へ入力する第2演算部と、を備えた制御装置。
続きを表示(約 830 文字)
【請求項2】
前記巻取機構は、前記対象物を巻き取る第1ローラを含み、
前記第1操作量、前記第2操作量、及び前記第3操作量は、前記第1ローラの回転速度を含む、請求項1に記載の制御装置。
【請求項3】
前記巻取機構は、前記対象物を巻き取る第1ローラを含み、
前記第1ローラは、軸方向周りに回転し、
前記第1操作量、前記第2操作量、及び前記第3操作量は、前記軸方向における前記第1ローラの位置を含む、請求項1又は2に記載の制御装置。
【請求項4】
前記巻取機構は、前記対象物を送り出す第2ローラを含み、
前記第1操作量、前記第2操作量、及び前記第3操作量は、前記第2ローラの回転速度を含む、請求項1又は2に記載の制御装置。
【請求項5】
前記制御量は、前記対象物の張力と、前記対象物の搬送速度と、前記対象物の搬送方向に対して垂直な方向における前記対象物の位置と、から選択される2つ以上を含む、請求項1又は2に記載の制御装置。
【請求項6】
前記モデルは、決定木又はニューラルネットワークを含む、請求項1又は2に記載の制御装置。
【請求項7】
前記モデルは、リカレントニューラルネットワークを含み、
前記第1制御部は、前記制御量の時系列データを前記モデルに入力する、請求項1又は2に記載の制御装置。
【請求項8】
前記巻取機構への目標値に基づいて前記第2操作量を算出する第2制御部をさらに備えた請求項1又は2に記載の制御装置。
【請求項9】
前記第1操作量に基づいて前記巻取機構が正常か判定する判定部をさらに備えた、請求項1又は2に記載の制御装置。
【請求項10】
請求項1又は2に記載の制御装置と、
前記巻取機構と、を備えた巻取装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、制御装置、巻取装置、制御システムの構築方法、制御システム、制御方法、プログラム、及び記憶媒体に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
制御対象を制御する装置がある。この制御装置に関して、制御対象からの制御量を、より目標値へ近づけることが可能な技術が求められている。
【先行技術文献】
【特許文献】
【0003】
特許第6813231号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、制御対象からの制御量を、より目標値へ近づけることが可能な、制御装置、巻取装置、制御システムの構築方法、制御システム、制御方法、プログラム、及び記憶媒体を提供することである。
【課題を解決するための手段】
【0005】
実施形態に係る制御装置は、対象物を巻き取り可能な巻取機構を制御する。前記制御装置は、第1制御部と、第1演算部と、第2演算部と、を備える。前記第1制御部は、前記巻取機構から、制御される対象である制御量を取得する。前記第1制御部は、予め機械学習されたモデルに前記制御量を入力することで、前記制御量が前記巻取機構から出力される場合の操作量に相当する第1操作量を取得する。前記第1演算部は、前記第1操作量と、前記巻取機構に向けて送信される第2操作量と、の差分を算出する。前記第2演算部は、前記第2操作量に前記差分を加えた第3操作量を、前記巻取機構へ入力する。
【図面の簡単な説明】
【0006】
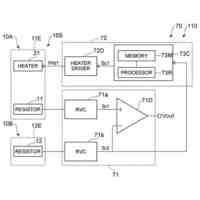
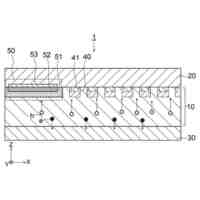
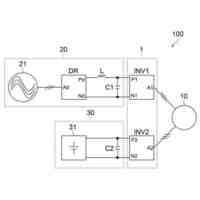
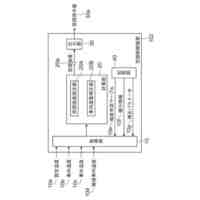
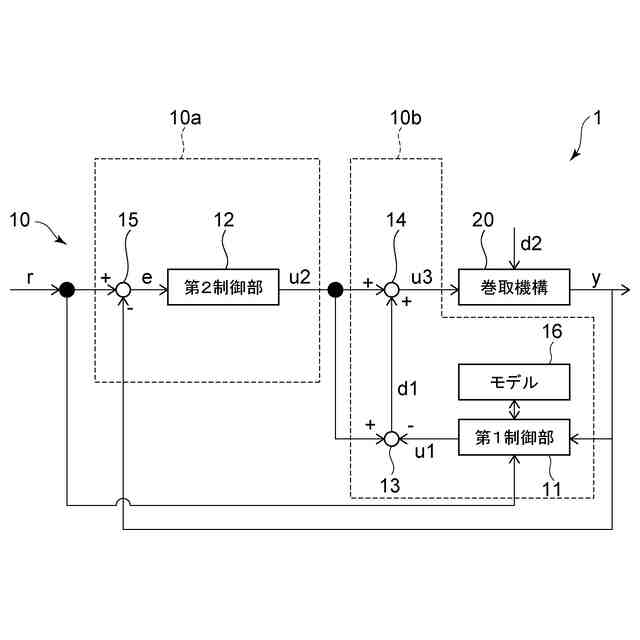
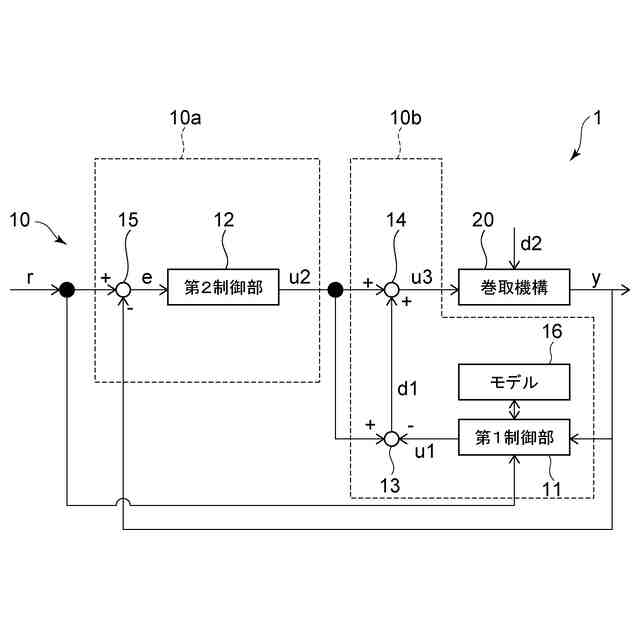
図1は、実施形態に係る巻取装置の構成を示すブロック図である。
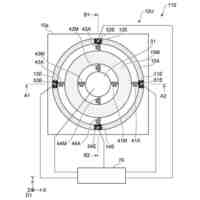
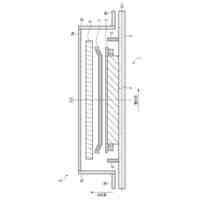
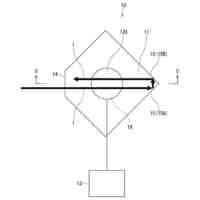
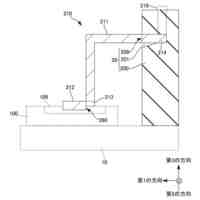
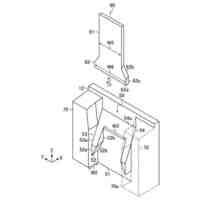
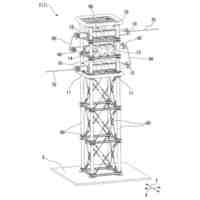
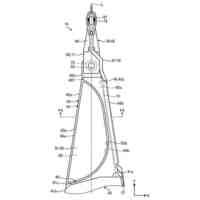
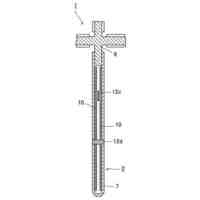
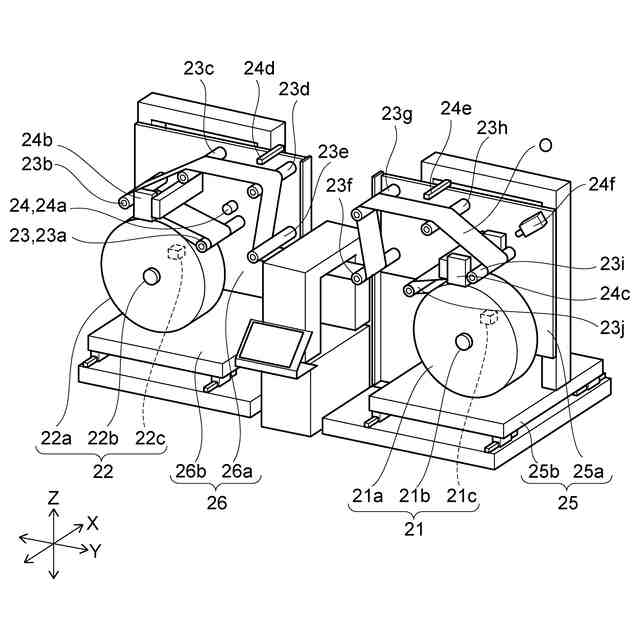
図2は、実施形態に係る巻取装置を示す斜視図である。
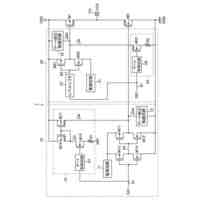
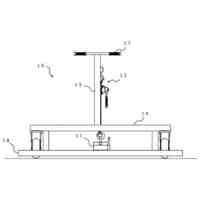
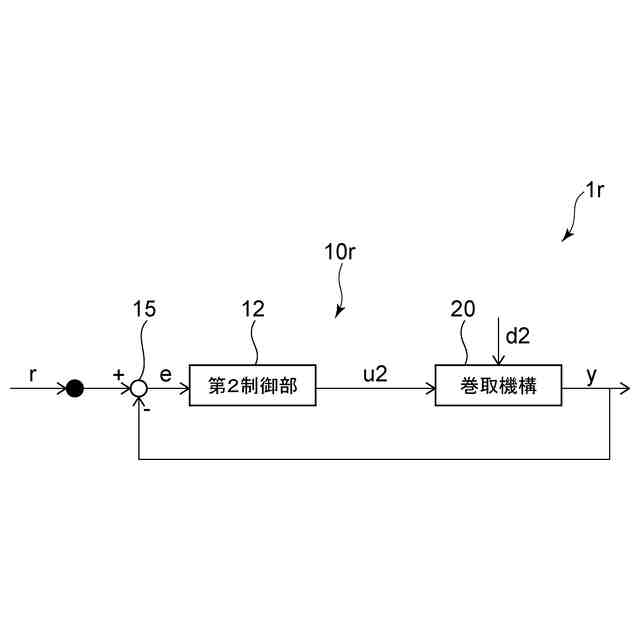
図3は、参考例に係る巻取装置1rの構成を示すブロック図である。
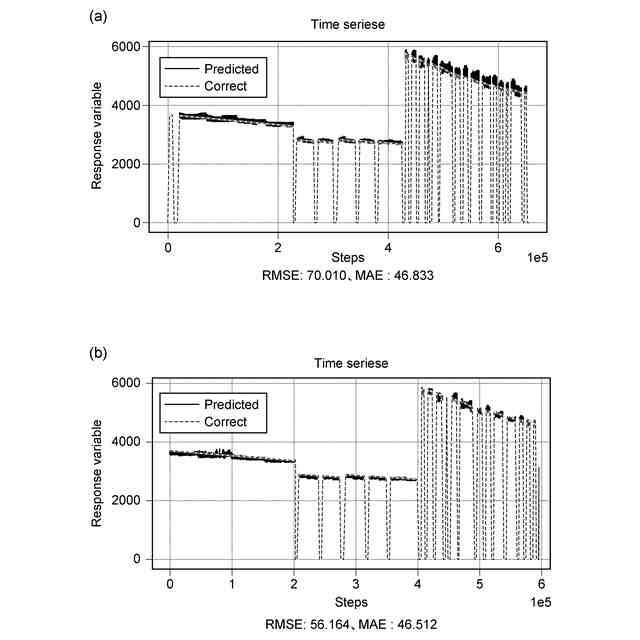
図4(a)及び図4(b)は、実施形態に係る制御システムの特性を示すデータである。
図5は、実施形態の変形例に係る巻取装置の構成を示すブロック図である。
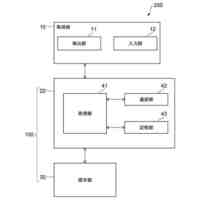
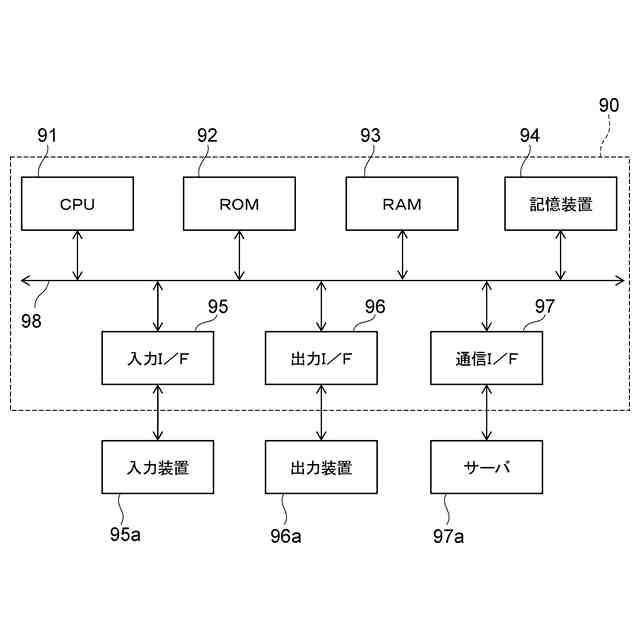
図6は、ハードウェア構成を表す模式図である。
【発明を実施するための形態】
【0007】
以下に、本発明の各実施形態について図面を参照しつつ説明する。図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。本願明細書と各図において、既に説明したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
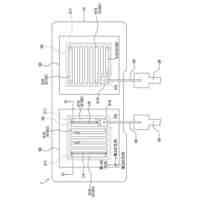
図1は、実施形態に係る巻取装置の構成を示すブロック図である。
図1に示すように、実施形態に係る巻取装置1は、制御装置10及び巻取機構20を含む。巻取機構20は、対象物を巻き取り可能である。対象物は、箔、線材などである。制御装置10は、巻取機構20の動作を制御する。
【0009】
制御装置10は、第1制御部11、第2制御部12、第1演算部13、第2演算部14、及び演算部15を含む。第1制御部11は、巻取機構20からの制御量y(出力値)を取得する。「制御量」は、制御対象に属する量のうち、制御される対象となっている量を指す。第1制御部11は、制御量yを取得すると、モデル16を参照する。モデル16は、制御量が入力されると、その制御量に対応した操作量を推定するように、予め機械学習されている。「操作量」は、制御系において,制御量を制御するために、制御対象に対して加えられる量を指す。 制御量及び操作量の定義については、JIS Z8116-1994で定義されている内容を使用することができる。
【0010】
例えば、モデル16は、決定木又はニューラルネットワークを含む。モデル16は、決定木としてランダムフォレストを含んでも良い。ニューラルネットワークが用いられる場合、モデル16は、リカレントニューラルネットワーク(RNN)を含むことが好ましい。RNNは、Long Short-Term Memory構造を含んでいても良い。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
24日前
株式会社東芝
台車
2か月前
株式会社東芝
固定子
2か月前
株式会社東芝
センサ
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
搬送装置
2か月前
株式会社東芝
電源回路
1日前
株式会社東芝
開閉装置
1か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
1日前
株式会社東芝
半導体装置
7日前
株式会社東芝
光スイッチ
1か月前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
1日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
遠心送風機
1か月前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
直流遮断器
2か月前
株式会社東芝
半導体装置
14日前
株式会社東芝
駆動システム
2か月前
株式会社東芝
ディスク装置
14日前
株式会社東芝
空調制御装置
7日前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
対策提示装置
1か月前
株式会社東芝
蓋の開閉装置
1か月前
株式会社東芝
電力変換装置
23日前
株式会社東芝
電気車制御装置
1か月前
株式会社東芝
有価物回収方法
1か月前
株式会社東芝
原子炉用制御棒
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ