TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014275
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023116714
出願日
2023-07-18
発明の名称
物体間の付着力算出装置、付着力算出方法、付着力算出システム、および、プログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01N
19/04 20060101AFI20250123BHJP(測定;試験)
要約
【課題】 安定した付着力算出を行う付着力算出システム、装置、方法、プログラムを提供する。
【解決手段】 本発明の一態様に記載の付着力算出装置は、第一の物体を支持する弾性体の歪み量から第一の方向への荷重を測定する第一のセンサと、第二の物体を支持する弾性体の歪み量から第二の方向への荷重を測定する第二のセンサと、を用いて取得された時系列データを取得する時系列データ取得部と、前記時系列データから、摩擦力の時系列データおよび垂直荷重の時系列データを取得し、前記摩擦力の時系列データと、前記垂直荷重の時系列データとを用いて、該垂直荷重が除荷されたタイミングに基づく、静止摩擦係数と、垂直荷重と、摩擦力とを取得し、前記静止摩擦係数と、前記垂直荷重と、前記摩擦力とを用いて、付着力を算出する付着力算出部と、を有することを特徴とする付着力算出装置。
【選択図】 図1
特許請求の範囲
【請求項1】
第一の物体を支持する弾性体の歪み量から第一の方向への荷重を測定する第一のセンサと、第二の物体を支持する弾性体の歪み量から第二の方向への荷重を測定する第二のセンサと、を用いて取得された時系列データを取得する時系列データ取得部と、
前記時系列データから、摩擦力の時系列データおよび垂直荷重の時系列データを取得し、
前記摩擦力の時系列データと、前記垂直荷重の時系列データとを用いて、
該垂直荷重が除荷されたタイミングに基づく、静止摩擦係数と、垂直荷重と、摩擦力とを取得し、
前記静止摩擦係数と、前記垂直荷重と、前記摩擦力とを用いて、付着力を算出する付着力算出部と、
を有することを特徴とする付着力算出装置。
続きを表示(約 1,700 文字)
【請求項2】
前記付着力算出部は、前記垂直荷重を除荷するタイミング情報をさらに取得することを特徴とする請求項1に記載の付着力算出装置。
【請求項3】
前記付着力算出部は、算出された付着力のうち、最大の付着力を前記第一の物体と前記第二の物体との間の付着力として取得することを特徴とする請求項1または2に記載の付着力算出装置。
【請求項4】
前記付着力算出部は、前記静止摩擦係数と、前記垂直荷重と、前記摩擦力を式(1)に代入することで、前記付着力を算出することを特徴とする請求項1または2に記載の付着力算出装置。
TIFF
2025014275000005.tif
95
89
【請求項5】
前記時系列データは、電圧の時系列データであることを特徴とする請求項1または2に記載の付着力算出装置。
【請求項6】
前記第一の物体および前記第二の物体のうち少なくとも一方の物体は、表面に曲率を有する物体であることを特徴とする請求項1または請求項2に記載の付着力算出システム。
【請求項7】
第一の物体を支持する弾性体の歪み量から第一の方向への荷重を測定する第一のセンサと、第二の物体を支持する弾性体の歪み量から第二の方向への荷重を測定する第二のセンサと、を用いて取得された時系列データを取得する測定データ取得ステップと、
前記時系列データから、摩擦力の時系列データおよび垂直荷重の時系列データを取得し、
前記摩擦力の時系列データと、前記垂直荷重の時系列データとを用いて、
該垂直荷重が除荷されたタイミングに基づく、静止摩擦係数と、垂直荷重と、摩擦力とを取得し、
前記静止摩擦係数と、前記垂直荷重と、前記摩擦力とを用いて、付着力を算出する付着力算出ステップと、
を有することを特徴とする付着力算出方法。
【請求項8】
請求項7に記載の付着力算出方法をコンピュータに実行させるためのプログラム。
【請求項9】
測定装置と、該測定装置から取得した測定データから付着力を算出する付着力算出装置と、を含み構成される付着力算出システムであって、
前記測定装置は、
第一の物体を支持する弾性体の歪み量から物体の接触界面に対して水平方向への荷重を測定する第一のセンサと、
第二の物体を支持する弾性体の歪み量から物体の接触界面に対して垂直方向への荷重を測定する第二のセンサと、を備え、
前記弾性体の歪み量の記録を開始する第一の工程と、
前記第一の物体と前記第二の物体を接触させ、摺動開始及び終了させる第二の工程と、
前記第一の物体と前記第二の物体の接触界面にかかる垂直荷重を除荷する第三の工程と、
前記第一の物体と前記第二の物体を離間させ、前記第一の工程に記載の弾性体の歪み量の記録を終了する第四の工程と、を実施することで、電圧の時系列データを取得し、
前記付着力算出装置は、
前記電圧の時系列データを取得する時系列データ取得部と、
前記電圧の時系列データより、
前記測定装置における前記第三の工程における、前記垂直荷重が除荷されたタイミングに対応する摩擦力と垂直荷重とから静止摩擦係数を算出し、
前記静止摩擦係数と、前記測定装置における前記垂直荷重が除荷されたタイミング以降の摩擦力および垂直荷重と、から付着力を算出する付着力算出部と、
を有することを特徴とする付着力算出システム。
【請求項10】
前記付着力算出部は、前記静止摩擦係数と、前記垂直荷重が除荷されたタイミング以降の摩擦力および垂直荷重と、を式(1)に代入することで、前記付着力を算出することを特徴とする請求項8に記載の付着力算出システム。
TIFF
2025014275000006.tif
93
89
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体間の付着力を算出する、付着力算出装置、付着力算出方法、付着力算出システム、および、プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
物体間の付着力を算出する方法として、物体間を引きはがす最中の力を算出する方法がよく用いられる。非特許文献1では、接触界面に対して垂直な方向に物体を引きはがすことにより物体間の付着力を算出することが開示されている。具体的には、一方の物体を固定し、他方の物体を板バネに接続したシステム構成を開示しており、物体を引きはがしていく際の板バネの歪み量から付着力を算出する。
【先行技術文献】
【非特許文献】
【0003】
安藤 泰久著、「微小荷重下の摩擦に及ぼす凝着力の影響に関する研究」 東京工業大学 博士論文、1997年2月28日
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら非特許文献1に開示の付着力算出方法では、接触界面に対して垂直な方向に引きはがすことで付着力を算出する構成であるため、引きはがし速度に依存して付着力の値が変化してしまい、安定した算出を行うことが難しい。具体的には、引きはがし速度が遅いときは引きはがし中に一部接触面が剥がれてしまい、物体間が離れるときには接触時と比べて小さな付着力が算出される。引きはがし速度を速くすることで一部接触面の剥がれは抑制することができるが、引きはがし速度に対して歪み算出器のサンプリング速度が追い付かず、データ欠損が起きてしまう。
【課題を解決するための手段】
【0005】
上記の課題を解決するために、本発明の一態様における付着力算出装置は、第一の物体を支持する弾性体の歪み量から第一の方向への荷重を測定する第一のセンサと、第二の物体を支持する弾性体の歪み量から第二の方向への荷重を測定する第二のセンサと、を用いて取得された時系列データを取得する時系列データ取得部と、時系列データから、摩擦力の時系列データおよび垂直荷重の時系列データを取得し、摩擦力の時系列データと、垂直荷重の時系列データとを用いて、該垂直荷重が除荷されたタイミングに基づく、静止摩擦係数と、垂直荷重と、摩擦力と、を取得し、静止摩擦係数と、垂直荷重と、摩擦力とを用いて、付着力を算出する付着力算出部と、を有する。
【発明の効果】
【0006】
本発明によれば、垂直荷重を除荷するときに引きはがし速度を十分遅くすることができ、安定した付着力算出を行う付着力算出システム、装置、方法、プログラムを提供することが可能になる。
【図面の簡単な説明】
【0007】
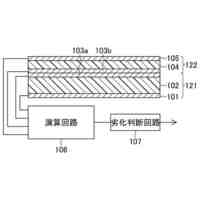
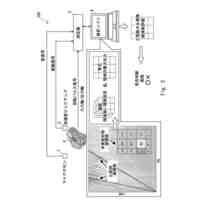
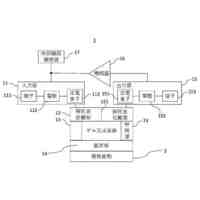
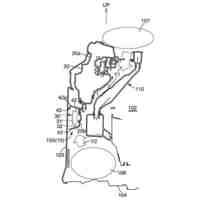
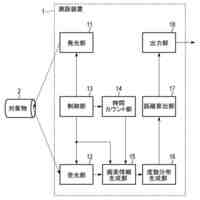
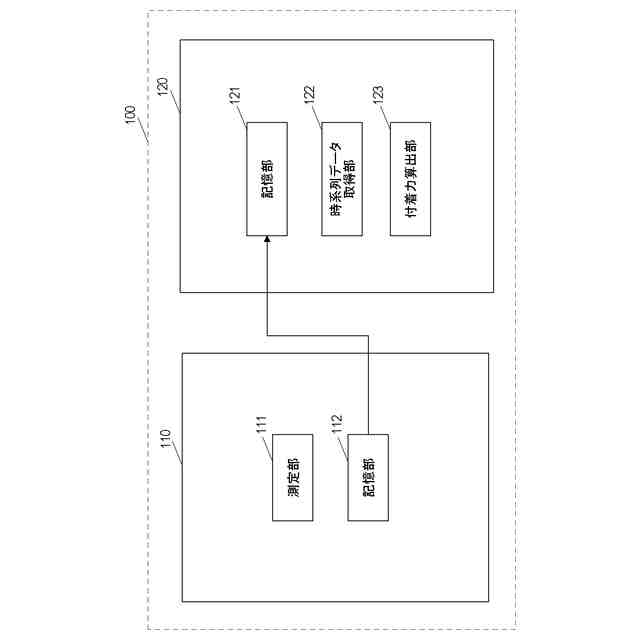
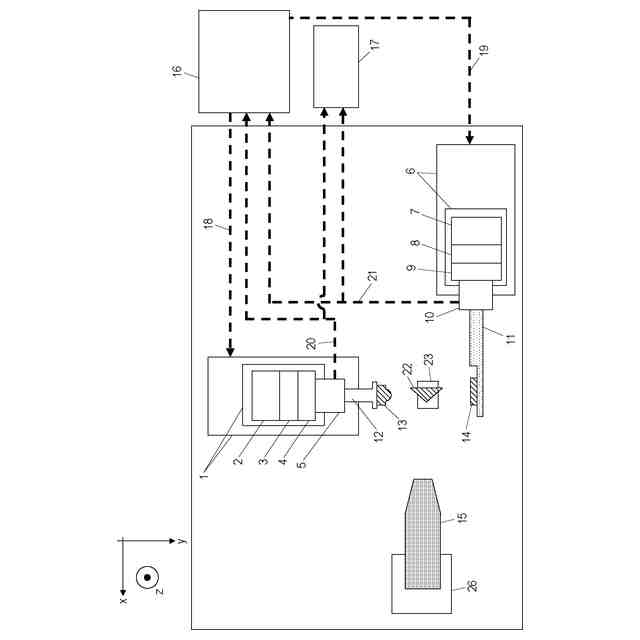
付着力算出システムの構成を示す図。
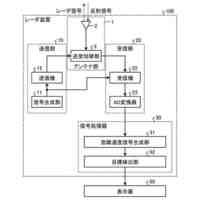
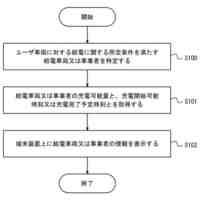
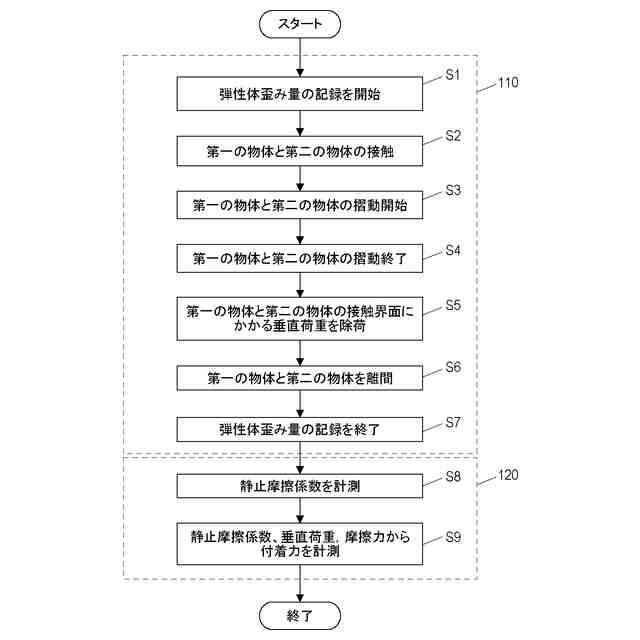
付着力算出システムによる、付着力算出方法を示すフロー図。
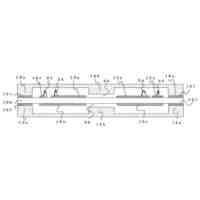
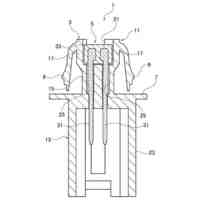
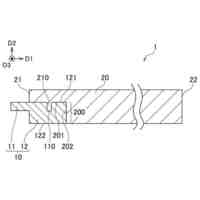
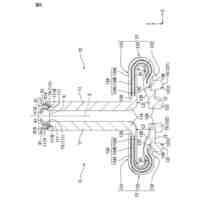
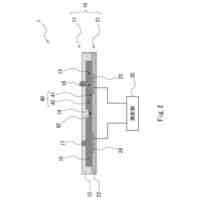
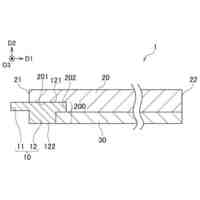
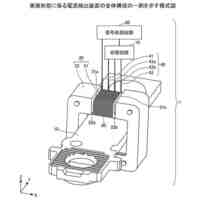
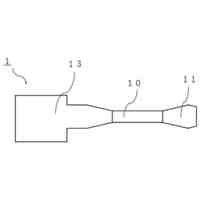
付着力算出システムを構成する測定装置構成の上面図。
付着力算出システムを構成する測定装置構成の側面図。
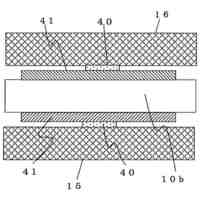
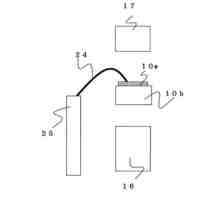
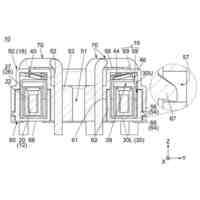
(a)測定装置による第二の物体の傾き算出時の装置構成の上面図。(b)測定装置による第一の物体の傾き算出時の装置構成の上面図。
算出された、接触判定前後の荷重センサによる垂直荷重の時系列データの例を示す図。
摺動開始から摺動終了後待機した実験動作に関して、算出された荷重センサによる垂直荷重の時系列データと、摩擦力の時系列データの例を示す図。
算出された、垂直荷重を除荷する前後の垂直荷重の時系列データ・摩擦力の時系列データ・摩擦係数の時系列データの例を示す図。
算出された付着力の時系列データを示す図。
【発明を実施するための形態】
【0008】
以下、図面を参照して、本発明の一実施形態について説明する。図1は本発明の一実施形態に係る付着力算出システム100のシステム構成を示す図である。付着力算出システム100は、電圧の時系列データを測定する測定装置110と、測定装置110によって測定された時系列データから、付着力を算出する付着力算出装置120とを含み構成される。ここで測定装置110はネットワークを介して、付着力算出装置120に接続されており、付着力算出装置120からの制御信号を受けて、測定データの取得を行う。
【0009】
測定装置110は、第一の物体を支持する弾性体の歪み量から物体の接触界面に対して水平方向への荷重を測定する第一のセンサと、第二の物体を支持する弾性体の歪み量から物体の接触界面に対して垂直方向への荷重を測定する第二のセンサとを備えた装置であり、測定部111によって電圧の時系列データを測定・取得する。測定部111によって測定された時系列データは、記憶部112へ記憶される。
【0010】
付着力算出装置120は、測定装置110によって測定された測定データを記憶する記憶部121、記憶部121を用いて時系列データである測定データを取得する時系列データ取得部122、時系列データ取得部122で取得した測定データから、付着力を算出する付着力算出部123を含み構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
液体展開用シート
12日前
株式会社トプコン
植物センサ
8日前
アズビル株式会社
湿度センサ
5日前
株式会社東芝
センサ
4日前
株式会社小野測器
回転計測装置
4日前
キヤノン電子株式会社
サーボ加速度計
12日前
キヤノン電子株式会社
サーボ加速度計
12日前
キヤノン電子株式会社
サーボ加速度計
12日前
株式会社ミツトヨ
変位測定装置
4日前
株式会社クボタ
作業車両
11日前
トヨタ自動車株式会社
異音解析方法
4日前
トヨタ自動車株式会社
NVH解析装置
4日前
キヤノン株式会社
撮像装置
4日前
株式会社大真空
センサ及びその製造方法
19日前
矢崎総業株式会社
サーミスタ
12日前
株式会社トーキン
電流センサ
11日前
三菱電機株式会社
振動センサ
8日前
株式会社日本マイクロニクス
プローブ
19日前
三菱電機株式会社
信号処理器及びレーダ装置
11日前
オムロン株式会社
プローブピン
8日前
トヨタ自動車株式会社
レーダ取付構造
4日前
国立大学法人東京科学大学
サンプル測定装置
5日前
株式会社ミツトヨ
画像測定機及びプログラム
11日前
株式会社デンソー
電圧検出回路
11日前
株式会社日本マイクロニクス
プローブ
19日前
株式会社デンソー
電圧検出回路
11日前
トヨタ自動車株式会社
方法
4日前
レーザーテック株式会社
検査方法及び検査装置
11日前
富士電機機器制御株式会社
電流検出装置
4日前
富士電機機器制御株式会社
電流検出装置
4日前
株式会社JVCケンウッド
ナビゲーション装置
18日前
キヤノン株式会社
測距装置
5日前
内山工業株式会社
分析装置用部材
4日前
TPR株式会社
スタイラス
8日前
株式会社ヨコオ
検査用ソケット
4日前
株式会社シノテスト
クレアチニン含有物質の安定化方法
8日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ