TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008761
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111221
出願日
2023-07-06
発明の名称
走行車線特定装置、走行車線特定方法、および走行車線特定プログラム、並びに、走行車線一致判定装置、走行車線一致判定方法、および走行車線一致判定プログラム
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
G06T
7/00 20170101AFI20250109BHJP(計算;計数)
要約
【課題】本開示は、走行車線を特定する精度を向上させることが可能な走行車線特定装置等を提供することを目的とする。
【解決手段】走行車線特定装置を実現する走行車線特定システムにおいて、サーバは、移動体の状態量に基づいて移動体から取得したカメラ画像を参照する時間幅を決定し、時間幅に応じて複数のカメラ画像を抽出する参照時間幅決定部と、抽出した各カメラ画像から区画線検出結果を生成する区画線検出部と、抽出した各カメラ画像について、指定日時におけるカメラ画像では生成されず他の時刻におけるカメラ画像では生成された区画線検出結果を仮想区画線検出結果として生成する仮想区画線検出部と、区画線検出結果に対する信頼度と仮想区画線検出結果に対する信頼度とを算出する区画線信頼度算出部と、区画線検出結果および仮想区画線検出結果のそれぞれに対する信頼度に基づいて走行車線を特定する走行車線特定部とを備える。
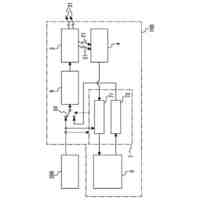
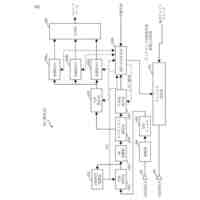
【選択図】図2
特許請求の範囲
【請求項1】
移動体の状態量に基づいて、前記移動体の走行車線を特定する指定日時と、前記指定日時の前の時刻、後ろの時刻、または前後の時刻とにおいて前記移動体から取得したカメラ画像を参照する時間幅を決定し、決定した時間幅に応じて複数のカメラ画像を抽出する参照時間幅決定部と、
前記参照時間幅決定部が抽出した各前記カメラ画像から、前記移動体の走行車線を含む道路の区画線の候補である区画線検出結果を生成する区画線検出部と、
前記参照時間幅決定部が抽出した各前記カメラ画像について、前記指定日時におけるカメラ画像では生成されず、他の時刻におけるカメラ画像では生成された前記区画線検出結果を仮想区画線検出結果として生成する仮想区画線検出部と、
前記区画線検出部が生成した前記区画線検出結果に対する信頼度と、前記仮想区画線検出部が生成した前記仮想区画線検出結果に対する信頼度とを算出する区画線信頼度算出部と、
前記区画線検出結果および前記仮想区画線検出結果のそれぞれに対する信頼度に基づいて、前記走行車線を特定する走行車線特定部と、
を備える、走行車線特定装置。
続きを表示(約 1,900 文字)
【請求項2】
前記移動体の状態量は、前記移動体の速度、前記移動体の移動距離、または前記移動体の方位の変化量である、請求項1に記載の走行車線特定装置。
【請求項3】
前記区画線検出部は、前記参照時間幅決定部が抽出した各前記カメラ画像を、画素ごとに表されている物体の種別を識別するように予め学習された識別器に入力し、区画線として識別された画素を抽出した結果から前記区画線検出結果を生成する、請求項1または2に記載の走行車線特定装置。
【請求項4】
前記仮想区画線検出部は、前記参照時間幅決定部が抽出した各前記カメラ画像について、あるカメラ画像では生成されず、他のカメラ画像では生成された前記区画線検出結果を前記仮想区画線検出結果として生成し、
前記参照時間幅決定部が抽出した各前記カメラ画像について前記移動体の周辺の車両が存在する車両領域を検出し、前記車両領域と前記仮想区画線検出結果とが重複する場合、前記区画線検出結果および前記仮想区画線検出結果のそれぞれに対する信頼度を補正する車両検出時信頼度補正部をさらに備える、請求項1または2に記載の走行車線特定装置。
【請求項5】
前記参照時間幅決定部が抽出した各前記カメラ画像から路面形状を抽出し、前記路面形状を構成する直線のうち前記区画線検出部が前記区画線検出結果を生成する際に算出した消失点に向かう直線をみなし区画線として抽出する路面領域境界線検出部をさらに備え、
前記区画線検出部は、前記区画線検出結果と前記みなし区画線とに基づいて同一の区画線抽出結果を識別し、前記みなし区画線が前記区画線検出結果に含まれていない場合、当該みなし区画線を前記区画線検出結果として追加する、請求項1または2に記載の走行車線特定装置。
【請求項6】
前記走行車線特定装置は移動体に搭載される、請求項1に記載の走行車線特定装置。
【請求項7】
移動体が同一の走行車線を走行している際に前記移動体に搭載されたカメラが撮影したカメラ画像であるか否かを判定する対象となる複数のカメラ画像を抽出する一致判定対象画像抽出部と、
前記一致判定対象画像抽出部が抽出した各前記カメラ画像について、抽出した前記カメラ画像を含む前後の時刻において同一の前記移動体に搭載された前記カメラで撮影されたカメラ画像を参照する時間幅を前記移動体の状態量に基づいて決定し、決定した時間幅に応じて複数のカメラ画像を抽出する参照時間幅決定部と、
前記参照時間幅決定部が抽出した各前記カメラ画像から、前記移動体の走行車線を含む道路の区画線の候補である区画線検出結果を生成する区画線検出部と、
前記参照時間幅決定部が抽出した各前記カメラ画像について、前記一致判定対象画像抽出部が抽出したカメラ画像では生成されず、他の時刻におけるカメラ画像では生成された前記区画線検出結果を仮想区画線検出結果として生成する仮想区画線検出部と、
前記区画線検出部が生成した前記区画線検出結果に対する信頼度と、前記仮想区画線検出部が生成した前記仮想区画線検出結果に対する信頼度とを算出する区画線信頼度算出部と、
前記区画線検出結果および前記仮想区画線検出結果のそれぞれに対する信頼度に基づいて、前記参照時間幅決定部が抽出した各前記カメラ画像における区画線を検出し、前記一致判定対象画像抽出部が抽出した各前記カメラ画像間において前記区画線が同一であるか否かを判定した結果を走行車線一致判定結果として生成する走行車線一致判定部と、
を備える、走行車線一致判定装置。
【請求項8】
前記一致判定対象画像抽出部は、同一の道路を撮影したカメラ画像であり、かつ予め定められた範囲内の位置に関連付けられた前記複数のカメラ画像を抽出する、請求項7に記載の走行車線一致判定装置。
【請求項9】
前記一致判定対象画像抽出部が各前記カメラ画像における前記区画線が同一でないと判定し、あるカメラ画像で検出された前記区画線が他のカメラ画像では検出されない場合において、前記他のカメラ画像における前記区画線に相当する位置に前記移動体の周辺の車両が存在するときは一致判定不能とする前記走行車線一致判定結果を生成する車両検出時一致判定不能部をさらに備える、請求項7または8に記載の走行車線一致判定装置。
【請求項10】
前記走行車線一致判定装置は移動体に搭載される、請求項7に記載の走行車線一致判定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体に搭載されたカメラによって撮影された移動体の周辺のカメラ画像に基づいて移動体が走行する車線を特定する走行車線特定装置、走行車線特定方法、および走行車線特定プログラム、並びに、移動体に搭載されたカメラによって撮影された同一の道路における近距離範囲内のカメラ画像に基づいて移動体が同一の車線を走行中の画像であるか否かを判定する走行車線一致判定装置、走行車線一致判定方法、および走行車線一致判定プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
経路案内を行うナビゲーションシステム、あるいは、自動運転システムおよびADAS(Advanced Driver Assistance System)などの運転支援システムでは、車両のドライバの運転を支援するために、あるいは、車両を自動運転制御するために、車両と当該車両が走行中の車線との位置関係を正確に検出することが求められる。
【0003】
従来、先行車の存在が原因となって検出されない区画線を、過去に検出した区画線の位置に基づいて仮想区画線として推定する技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
国際公開第2018/012179号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、区画線が存在すると推定される箇所に車両が検出された場合、過去に検出された区画線の位置に基づいて仮想区画線を推定しているが、推定した仮想区画線の信頼度を高く補正することができない。その結果、周辺に車両が多い状況では区画線が検出されず、走行車線を誤って判定する可能性がある。
【0006】
本開示は、このような問題を解決するためになされたものであり、走行車線を特定する精度を向上させることが可能な走行車線特定装置、走行車線特定方法、および走行車線特定プログラム、並びに、走行車線一致判定装置、走行車線一致判定方法、および走行車線一致判定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
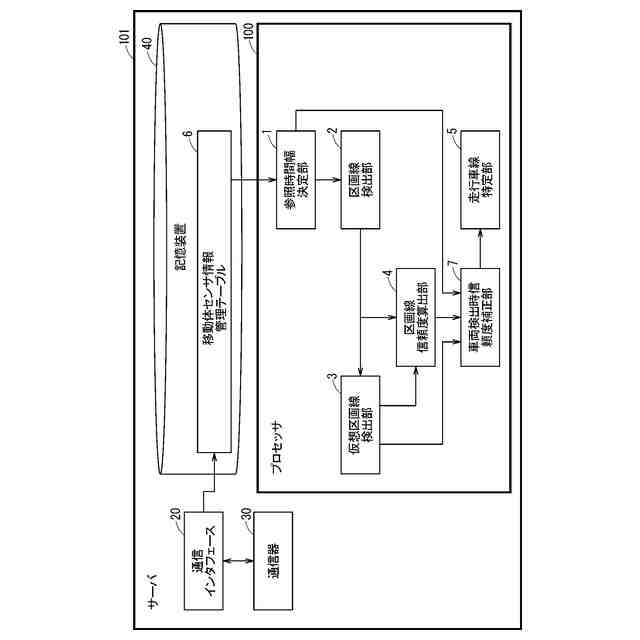
上記の課題を解決するために、本開示による走行車線特定装置は、移動体の状態量に基づいて、移動体の走行車線を特定する指定日時と、指定日時の前の時刻、後ろの時刻、または前後の時刻とにおいて移動体から取得したカメラ画像を参照する時間幅を決定し、決定した時間幅に応じて複数のカメラ画像を抽出する参照時間幅決定部と、参照時間幅決定部が抽出した各カメラ画像から、移動体の走行車線を含む道路の区画線の候補である区画線検出結果を生成する区画線検出部と、参照時間幅決定部が抽出した各カメラ画像について、指定日時におけるカメラ画像では生成されず、他の時刻におけるカメラ画像では生成された区画線検出結果を仮想区画線検出結果として生成する仮想区画線検出部と、区画線検出部が生成した区画線検出結果に対する信頼度と、仮想区画線検出部が生成した仮想区画線検出結果に対する信頼度とを算出する区画線信頼度算出部と、区画線検出結果および仮想区画線検出結果のそれぞれに対する信頼度に基づいて、走行車線を特定する走行車線特定部とを備える。
【発明の効果】
【0008】
本開示によれば、走行車線を特定する精度を向上させることが可能となる。
【図面の簡単な説明】
【0009】
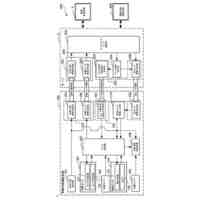
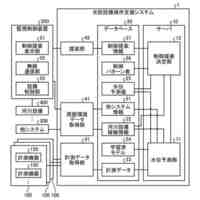
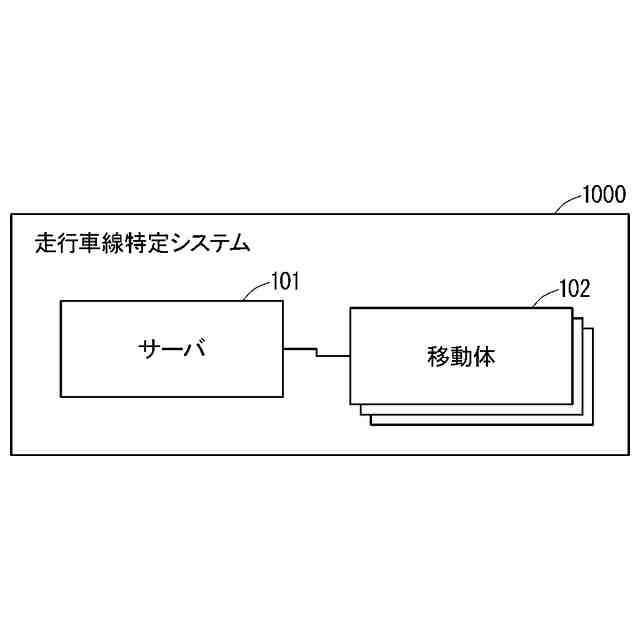
実施の形態1に係る走行車線特定システムの構成の一例を示すブロック図である。
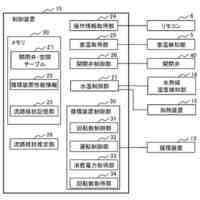
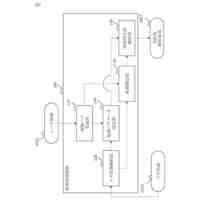
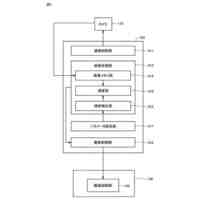
実施の形態1に係るサーバの構成の一例を示すブロック図である。
実施の形態1に係る参照時間幅決定部の動作を説明するための図である。
実施の形態1に係る仮想区画線検出部の動作を説明するための図である。
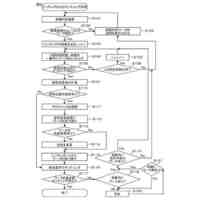
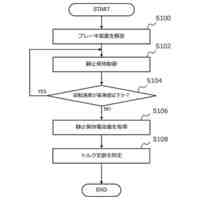
実施の形態1に係るサーバの動作の一例を示すフローチャートである。
実施の形態2に係るサーバの構成の一例を示すブロック図である。
実施の形態2に係る車両検出時信頼度補正部の動作を説明するための図である。
実施の形態2に係るサーバの動作の一例を示すフローチャートである。
実施の形態3に係るサーバの構成の一例を示すブロック図である。
実施の形態3に係る路面領域境界線検出部の動作を説明するための図である。
実施の形態4に係る走行車線一致判定システムの構成の一例を示すブロック図である。
実施の形態4に係るサーバの構成の一例を示すブロック図である。
実施の形態4に係るサーバの動作の一例を示すフローチャートである。
実施の形態5に係るサーバの構成の一例を示すブロック図である。
実施の形態5に係る車両検出時一致判定不能部の動作を説明するための図である。
実施の形態5に係るサーバの動作の一例を示すフローチャートである。
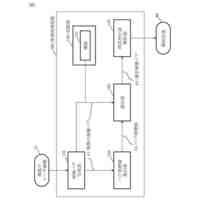
実施の形態6に係る移動体の構成の一例を示すブロック図である。
実施の形態7に係る移動体の構成の一例を示すブロック図である。
実施の形態7に係る移動体の構成の一例を示すブロック図である。
【発明を実施するための形態】
【0010】
<実施の形態1>
<構成>
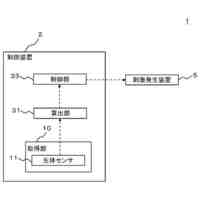
図1は、実施の形態1に係る走行車線特定システム1000の構成の一例を示すブロック図である。走行車線特定システム1000は、実施の形態1に係る走行車線特定装置を実現する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
7日前
三菱電機株式会社
掃除機
4日前
三菱電機株式会社
歯車装置
1日前
三菱電機株式会社
電気機器
1日前
三菱電機株式会社
照明装置
7日前
三菱電機株式会社
加熱調理器
7日前
三菱電機株式会社
電磁波発生装置
4日前
三菱電機株式会社
三次元造形装置
7日前
三菱電機株式会社
被塗物の粉体塗装方法
7日前
三菱電機株式会社
トランス及び電力変換器
4日前
三菱電機株式会社
半導体装置および電力変換装置
4日前
三菱電機株式会社
フィルター清掃装置及びショーケース
4日前
三菱電機株式会社
はんだ付け装置及び半導体装置の製造方法
7日前
三菱電機株式会社
オゾン放出方法、オゾン放出装置および部屋
4日前
三菱電機株式会社
車載自動運転装置および自動運転車両システム
1日前
三菱電機株式会社
温水式暖房装置および温水式暖房装置の制御方法
4日前
三菱電機株式会社
ピッキングシステム、ピッキング方法およびプログラム
4日前
三菱電機株式会社
制御装置、起床支援システム、学習装置および推論装置
7日前
三菱電機株式会社
情報処理装置、情報処理方法、及び情報処理プログラム
4日前
三菱電機株式会社
太陽電池パネルの製造方法および太陽電池パネル製造装置
4日前
三菱電機株式会社
半導体装置、半導体装置の製造方法、及び、電力変換装置
4日前
三菱電機株式会社
情報処理装置、情報処理方法、および情報処理プログラム
4日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
無線通信システム、無線通信方法、および無線通信プログラム
7日前
三菱電機株式会社
電機子、回転電機、電機子の製造方法および回転電機の製造方法
7日前
三菱電機株式会社
回転電機の製造方法、防水部品、防水部品の製造方法及び回転電機
7日前
三菱電機株式会社
灯具及び照明装置
2日前
三菱電機ビルソリューションズ株式会社
エレベーターの制御装置
7日前
三菱電機株式会社
光デバイスの動作方法
3日前
三菱電機株式会社
デジタルツインを使用してシステムを制御するためのデバイスおよび方法
4日前
三菱電機株式会社
補強情報生成システム、補強情報生成方法、及び補強情報生成プログラム
4日前
三菱電機株式会社
全地球航法衛星システムの受信機の状態を追跡するためのシステムおよび方法
4日前
三菱電機株式会社
水防設備操作支援システム、水防設備操作支援方法および水防設備操作支援プログラム
4日前
三菱電機ビルソリューションズ株式会社
エレベーターの足場装置及びエレベーター装置
7日前
三菱電機株式会社
輝度調整装置、輝度調整方法、コンピュータを輝度調整装置として機能させるためのプログラム
4日前
三菱電機株式会社
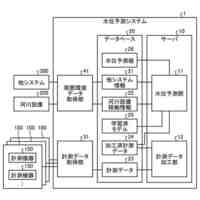
水位予測システム、学習装置、水位予測方法、水位予測プログラム、学習方法および学習プログラム
4日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ