TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025002385
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102538
出願日
2023-06-22
発明の名称
掘削位置特定システムおよび掘削方法
出願人
大成建設株式会社
,
株式会社演算工房
代理人
弁理士法人磯野国際特許商標事務所
主分類
E21D
9/11 20060101AFI20241226BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】随時変化し得る建設機械の掘削位置を精度よく、効率的に特定しながら掘削することにより、施工精度の向上を図ることを可能とした、建設機械の掘削位置特定システムと掘削方法を提供する。
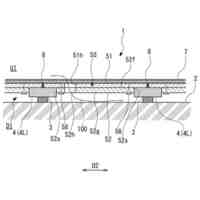
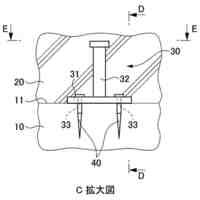
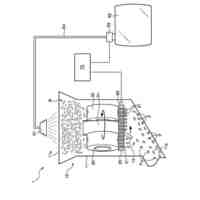
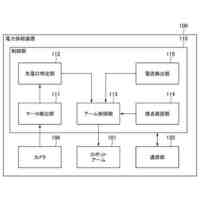
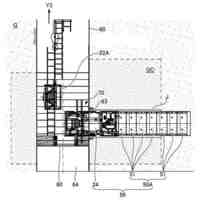
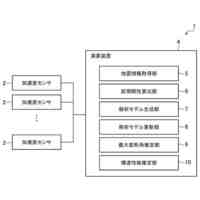
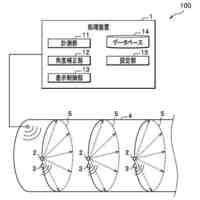
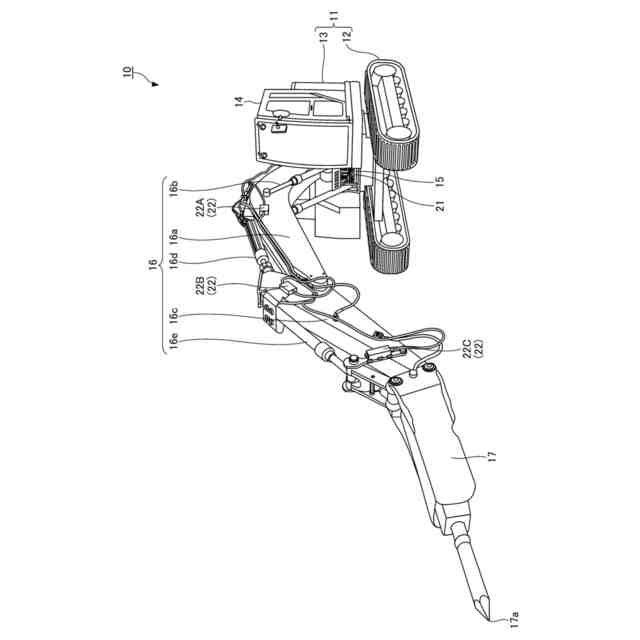
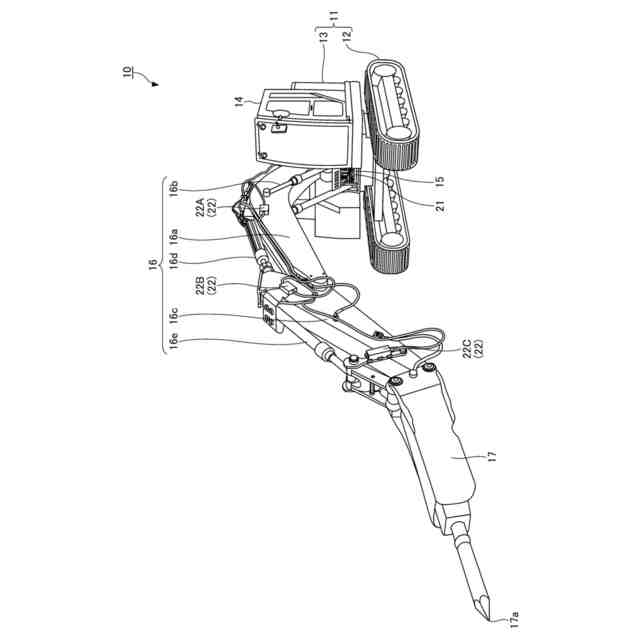
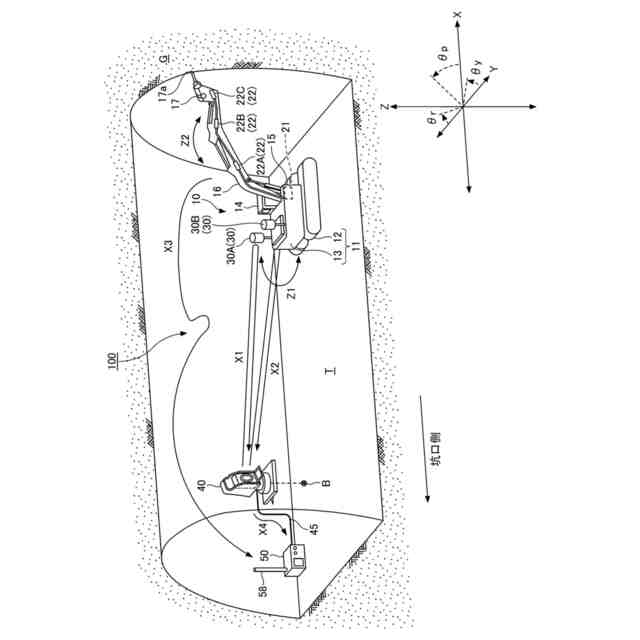
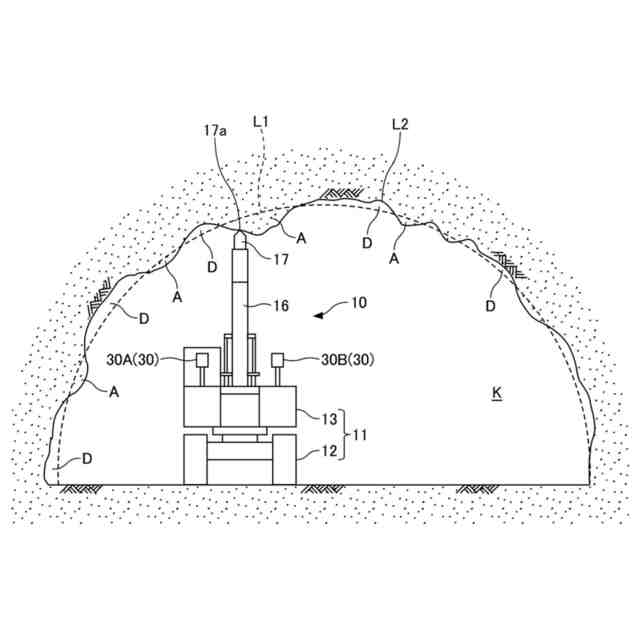
【解決手段】先端に掘削機17が装着されている作業装置16が走行台車11に旋回自在に取り付けられている建設機械10の掘削位置を特定する掘削位置特定システム100である。作業装置16の方向角を特定する慣性センサ21と、建設機械10に設置される複数のターゲット30と、ターゲット30を自動追尾してターゲット30の3次元座標を測定する測量機40と、慣性センサ21による検出データと測量機40による測量データとに基づいて掘削位置を特定する演算手段と、慣性センサ21の動作時間を計測する計時手段とを有している。校正値による校正後の慣性センサ21が動作したときに蓄積する誤差が誤差閾値に達する前に慣性センサ21の誤差をリセットする。
【選択図】図1
特許請求の範囲
【請求項1】
先端に掘削機が装着されている作業装置が走行台車に旋回自在に取り付けられている建設機械において、前記掘削機の掘削位置を特定する、掘削位置特定システムであって、
前記作業装置のロール角とピッチ角とヨー角を検出して、前記作業装置の方向角を特定する慣性センサと、
前記建設機械に設置される複数のターゲットと、
前記建設機械の移動に伴って移動する少なくとも1つの前記ターゲットを自動追尾して、3次元座標が既知の基準点座標に基づいて前記ターゲットの3次元座標を測定する測量機と、
前記慣性センサによる検出データと前記測量機による測量データとに基づいて前記掘削位置を特定する演算手段と、
前記慣性センサの動作時間を計測する計時手段と、を有し、
前記慣性センサは、事前試験により算出された校正値により校正されており、
前記演算手段は、前記動作時間が所定時間に達するまでの残り時間を算出し、
前記所定時間は、前記校正値による校正後の前記慣性センサが動作したときに蓄積する誤差が誤差閾値に達するまでの時間であることを特徴とする、掘削位置特定システム。
続きを表示(約 1,200 文字)
【請求項2】
前記複数のターゲットは、前記測量機による視準の可不可を実行する、視準可不可手段を備えていることを特徴とする、請求項1に記載の掘削位置特定システム。
【請求項3】
前記慣性センサは、加速度センサと、ジャイロとを備えていることを特徴とする、請求項1に記載の掘削位置特定システム。
【請求項4】
請求項1乃至請求項3のいずれか1項に記載の掘削位置特定システムを利用した掘削方法であって、
事前試験を行い前記慣性センサの校正値を算出する校正値算出工程と、
前記校正値により前記慣性センサを校正する校正工程と、
前記掘削機により掘削を行う掘削工程と、
前記慣性センサが動作したときに蓄積する誤差をリセットする補正工程と、を備えており、
前記掘削工程では、1台の前記測量機により1つの前記ターゲットを自動追尾して得た測量データと、前記慣性センサによる検出データに基づいて、掘削位置を特定しながら前記所定時間に至るまで掘削を行い、
前記補正工程では、前記掘削工程において得られた最新の前記1つのターゲットの測量データと、他のターゲットを視準して得た測量データとに基づいて前記掘削機の掘削位置を特定することを特徴とする、掘削方法。
【請求項5】
前記補正工程では、前記建設機械が停止した後に、前記複数のターゲットを1基ずつ順番に視準することを特徴とする、請求項4に記載の掘削方法。
【請求項6】
前記校正値算出工程では、
慣性センサにより旋回角速度を取得する作業と、
前記旋回角速度から旋回速度Nを算出する作業と、
前記旋回速度Nの誤差の割合SFを算出する作業と、
校正する旋回速度の区間を選択する作業と、
前記誤差の割合SFに基づいて、前記区間に含まれる前記旋回速度Nを校正するための補正関数を求める作業と、
前記補正関数を用いて補正係数を算出する作業と、
前記補正係数から前記旋回速度Nの校正値を算出する作業と、により前記校正値を算出することを特徴とする、請求項4に記載の掘削方法。
【請求項7】
前記旋回速度Nは、旋回時間t内で時間Δtごとに前記慣性センサで取得された旋回角速度ωの積分値θを前記旋回時間tで除すことにより算出することを特徴とする、請求項6に記載の掘削方法。
【請求項8】
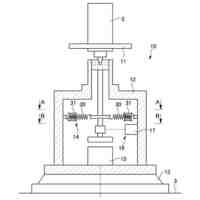
前記事前試験では、前記慣性センサは、エンコーダを有する試験装置の旋回試験用テーブルに取り付けられており、
前記誤差の割合SFは、式1を利用して、前記エンコーダで取得された前記旋回試験用テーブルの回転角θeと、前記積分値θとから算出することを特徴とする、請求項7に記載の掘削方法。
TIFF
2025002385000006.tif
13
167
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設機械の掘削位置特定システムおよび掘削方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
NATM等の山岳トンネルの施工において、岩盤を掘削する際にトンネルの設計掘削断面ラインに対して岩盤がトンネルの中央側へ張り出すアタリ部が生じた場合には、設計掘削断面ラインに近づけるように、アタリ部を除去する必要がある。アタリ部の除去(掘削)には、例えば、削岩機などのアタッチメントを取り付けた旋回式の建設機械(例えばバックホウ)を使用する。
【0003】
従来のアタリ部の除去方法は、作業員が切羽近傍で目視により確認を行い、除去する箇所をレーザーポインター等で建設機械のオペレータに指示する方法である。ところが、アタリ部や余掘り部の状況確認は作業員と建設機械のオペレータによる経験や技量に頼るところが大きく、アタリ部の除去不足による追加作業の発生や、過大な余掘りに伴うコンクリート吹付け量の増加に起因して、施工コストが増加するといった課題がある。
以上のことから、作業員がレーザーポインター等で建設機械のオペレータに指示する方法に代わり、建設機械のオペレータが自ら、随時変化し得る建設機械の掘削位置を都度精度よく、効率的に特定することのできる、建設機械の掘削位置特定システムと掘削方法が望まれる。
【0004】
ここで、特許文献1には、掘削機の基準位置及び方向の設定装置と設定方法が提案されている。
特許文献1の設定装置は、削岩機を搭載した建設機械と、建設機械をガイドマウンティングで支承するブームと、建設機械とブームの可動部分の作動量を検出するための検出器と、検出器からの検出データに基づいて建設機械の自動位置決め又は位置表示を行う制御装置とを備えた掘削機において、建設機械に設置された1個のプリズムと、建設機械の前後方向移動に伴って移動するプリズムを自動追尾し、検出器の検出データから演算された測定点のプリズム位置の演算データと、自動追尾式測量機による2測定点のプリズム位置の測定データとに基づいて、掘削の基準方向に対する掘削機の基準方向のずれと、切羽に対する掘削機の基準点の位置とを求め、掘削機の基準方向のずれと基準点の位置のデータを制御装置に設定する演算手段とを備えている。
【0005】
特許文献1の掘削機により掘削作業を行う際は、掘削機の台車を切羽付近に設置した後、建設機械を移動して、切羽上の点にビットの先端を第1測定点として接触させ、演算手段は第1測定点に対して、検出器の検出データからプリズム位置の演算データを求めるとともに、自動追尾式測量機は、建設機械の移動に伴って移動するプリズムを自動追尾してプリズム位置の第1測定データを測定する。次に、ビットの先端を切羽上の点から所定距離に離隔するように建設機械をその前後方向に第2測定点まで後退させ、自動追尾式測量機は、プリズム位置の第2測定データを測定するというものである。
【0006】
また、特許文献2には、トータルステーションと、建設機械に設置された反射体と、建設機械の姿勢情報を測定するセンサユニットと、情報処理を行う制御手段とを具備し、トータルステーションからの座標情報と、センサユニットからの姿勢情報とに基づいて、建設機械の作業具の先端座標を特定する機能を有する、こそく管理装置が開示されている。
【0007】
一方、トータルステーションによる自動追尾では、旋回式建設機械の旋回時にターゲットを正しく視準できないことがある。
これに対し、旋回式建設機械の旋回部に高精度な慣性センサが備わっていれば、慣性センサによる測定値と照らし合わせることで、トータルステーションによる視準ミスを検知し、トータルステーションを自動復帰させることができる。
慣性センサは、3軸のジャイロと3軸の加速度センサからなるセンサで、主に慣性航法等に用いられ三次元位置の自己診断に用いられる。
【0008】
ところが、慣性センサでは、ジャイロの誤差が蓄積する(いわゆるドリフト誤差が発生する)。慣性センサに誤差が蓄積すると、建設機械の位置や旋回方向等にズレが生じ、アタリ部を除去する際のノミ先の先端位置に誤差が生じるおそれがある。ノミ先の先端位置に誤差が生じると、アタリ部を除去する際の精度に影響がおよぶ。
【先行技術文献】
【特許文献】
【0009】
特開2003-307085号公報
特開2017-190587号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、随時変化し得る建設機械の掘削位置を精度よく、効率的に特定しながら掘削することにより、施工精度の向上を図ることを可能とした、建設機械の掘削位置特定システムと掘削方法を提供することを目的としている。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
大成建設株式会社
推定方法
1か月前
大成建設株式会社
送電装置
2日前
大成建設株式会社
防振床構造
2日前
大成建設株式会社
木質複合構造
2か月前
大成建設株式会社
風洞実験装置
20日前
大成建設株式会社
地盤計測システム
23日前
大成建設株式会社
気体貯蔵放出材料
2日前
大成建設株式会社
摩擦制振ダンパー
2か月前
大成建設株式会社
ペレット製造装置
1か月前
大成建設株式会社
既存建物の解体方法
1か月前
大成建設株式会社
床版接合部の設計方法
2か月前
大成建設株式会社
木材性状推定システム
1か月前
大成建設株式会社
杭の施工方法および杭
2か月前
大成建設株式会社
炭酸カルシウムの製造装置
2日前
大成建設株式会社
浚渫用施設および浚渫方法
2か月前
大成建設株式会社
木材縦弾性係数推定システム
1か月前
大成建設株式会社
足場装置および足場構築方法
1か月前
大成建設株式会社
土壌改良剤、及び土壌改良方法
1か月前
大成建設株式会社
電力供給装置及び電力供給方法
23日前
大成建設株式会社
仮設鋼床版および床版取替工法
26日前
大成建設株式会社
地下水排水構造と地下水排水方法
1か月前
大成建設株式会社
中和処理システムと中和処理方法
2日前
大成建設株式会社
免震基礎構造およびその構築方法
1か月前
大成建設株式会社
到達立坑における掘進機の回収方法
2か月前
大成建設株式会社
異種コンクリートの切替り特定方法
1か月前
大成建設株式会社
建物の健全性モニタリングシステム
3日前
大成建設株式会社
単杭の極限先端支持力度の評価方法
1か月前
大成建設株式会社
風力発電方法および風力発電システム
10日前
大成建設株式会社
凍結地盤の掘削土の排土装置と排土方法
1か月前
大成建設株式会社
水槽構造物および水槽構造物の施工方法
2か月前
大成建設株式会社
シールド到達構造およびシールド到達方法
2か月前
大成建設株式会社
内空変位計測システム及び内空変位計測方法
1か月前
大成建設株式会社
既設トンネルの坑口補強構造と坑口補強方法
1か月前
大成建設株式会社
消音設計支援システム、防振設計支援システム
1か月前
大成建設株式会社
吊荷向き制御システムおよびブレード設置方法
2か月前
大成建設株式会社
既設トンネルと分岐トンネルの接合構造と接合方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ