TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024170092
公報種別
公開特許公報(A)
公開日
2024-12-06
出願番号
2023087059
出願日
2023-05-26
発明の名称
走行制御方法及び走行制御装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
30/10 20060101AFI20241129BHJP(車両一般)
要約
【課題】過去に車両が走行した走行軌跡に基づいて生成された目標走行軌道の利点を生かしつつ、より滑らかな目標走行軌道を生成する。
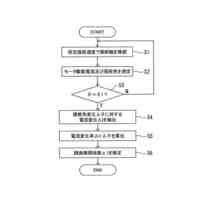
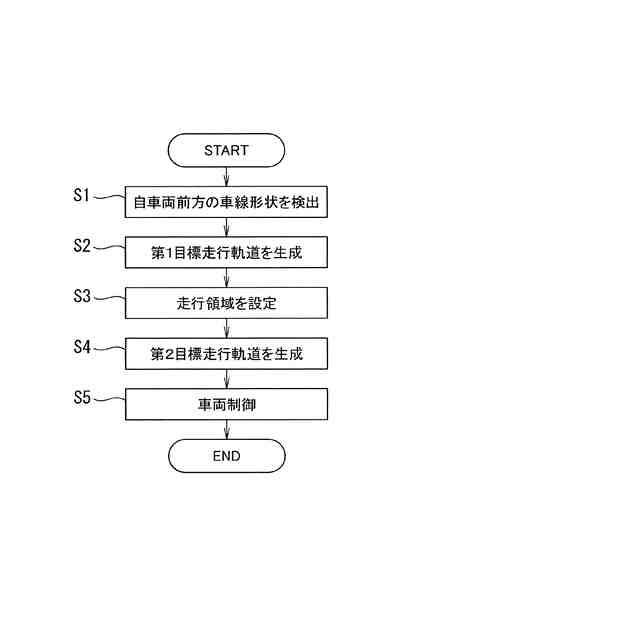
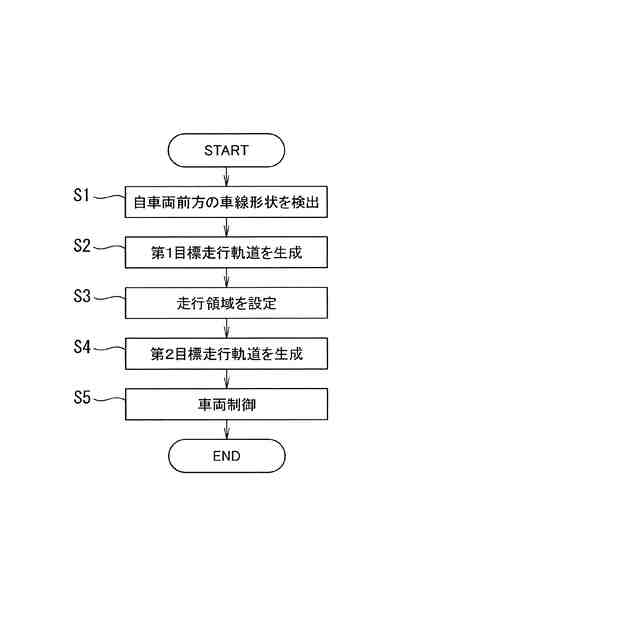
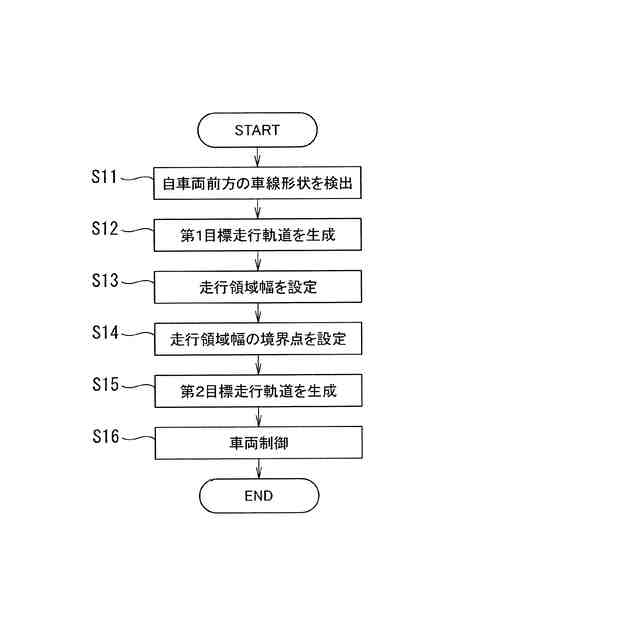
【解決手段】走行制御方法では、自車両が走行する走行車線の自車両前方の車線形状を検出し(S1)、過去に車両が走行した走行軌跡に基づいて、自車両前方の走行車線における第1目標走行軌道を生成し(S2)、第1目標走行軌道に基づいて、自車両前方の走行車線における自車両が走行する走行領域を設定し(S3)、走行領域内を走行する第2目標走行軌道を、第2目標走行軌道の曲率及び曲率変化の少なくとも一方について予め設定した制約条件を満足するように生成し(S4)、第2目標走行軌道に沿って走行するように自車両を制御する(S5)。
【選択図】図4
特許請求の範囲
【請求項1】
自車両が走行する走行車線の前記自車両前方の車線形状を検出し、
過去に車両が走行した走行軌跡に基づいて、前記自車両前方の前記走行車線における第1目標走行軌道を生成し、
前記第1目標走行軌道に基づいて、前記自車両前方の前記走行車線における前記自車両が走行する走行領域を設定し、
前記走行領域内を走行する第2目標走行軌道を、前記第2目標走行軌道の曲率及び曲率変化の少なくとも一方について予め設定した制約条件を満足するように生成し、
前記第2目標走行軌道に沿って走行するように前記自車両を制御する、
ことを特徴とする走行制御方法。
続きを表示(約 1,400 文字)
【請求項2】
前記制約条件として、前記第2目標走行軌道の曲率及び曲率変化の少なくとも一方を変数に含んだ評価関数が最小又は閾値未満になるように前記第2目標走行軌道を生成する、ことを特徴とする請求項1に記載の走行制御方法。
【請求項3】
車線幅方向の前記走行領域の幅である走行領域幅を、前記第1目標走行軌道の形状に基づいて設定することを特徴とする請求項1に記載の走行制御方法。
【請求項4】
前記第1目標走行軌道上の複数の点の近似直線を生成し、
前記第1目標走行軌道上の点から前記近似直線までの距離に基づいて前記走行領域幅を設定する、
ことを特徴とする請求項3に記載の走行制御方法。
【請求項5】
前記第1目標走行軌道上の隣接する3つの点を含むグループを複数個設定し、
前記隣接する3つの点のうち第1点と第3点との間に挟まれる第2点から前記第1点と前記第3点とを結んだ直線までの距離を前記グループ毎に算出し、
前記第2点から前記第1点と前記第3点とを結んだ直線までの前記距離の最大値に基づいて前記走行領域幅を設定する、
ことを特徴とする請求項4に記載の走行制御方法。
【請求項6】
前記第1目標走行軌道上の少なくとも3つの点の近似直線を生成し、
前記少なくとも3つの点の各々を、これらの点から前記近似直線へ向かうそれぞれの方向へ、前記車線幅方向に沿って前記走行領域幅だけ移動させた点を、前記走行領域の境界点として設定する、
ことを特徴とする請求項3に記載の走行制御方法。
【請求項7】
前記走行領域の前記車線幅方向の両端の境界点のうちの何れか一方である第1境界点として、前記第1目標走行軌道上の点を設定し、
前記両端の境界点のうち他方である第2境界点として、前記少なくとも3つの点の各々を、これらの点から前記近似直線へ向かうそれぞれの方向へ、前記車線幅方向に沿って前記走行領域幅だけ移動させた点を設定する、
ことを特徴とする請求項6に記載の走行制御方法。
【請求項8】
前記少なくとも3つの点のうち何れか点を、前記何れかの点から前記近似直線へ向かうそれぞれの方向へ、前記車線幅方向に沿って前記走行領域幅だけ移動させた点が、前記走行車線の外に出た場合には、前記移動させた点を通って前記車線幅方向に延びる直線と、車線境界線との交点に前記境界点を設定することを特徴とする請求項7に記載の走行制御方法。
【請求項9】
前記第1目標走行軌道上の点が前記走行車線の外に出ている場合、前記走行車線の外に出ている前記第1目標走行軌道上の点を通って前記車線幅方向に延びる直線と車線境界線との交点に前記第1境界点を設定することを特徴とする請求項7に記載の走行制御方法。
【請求項10】
前記第1目標走行軌道上の複数の点の近似直線を生成し、
前記第1目標走行軌道上の点から前記近似直線までの距離が閾値以上である第1区間と、前記距離が閾値未満である第2区間とを設定し、
前記第1区間では前記走行領域内に前記第2目標走行軌道を生成し、
前記第2区間では前記第1目標走行軌道上の点を通過する前記第2目標走行軌道を生成する、
ことを特徴とする請求項1に記載の走行制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行制御方法及び走行制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
下記特許文献1には、過去の手動運転時の走行軌跡を学習して、自動走行時に目標軌道を生成する車両走行制御装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-022353号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
過去に車両が手動運転で走行した走行軌跡を学習した学習モデルを用いて自車両の目標走行軌道を生成することにより、乗員が意図する軌道に近い目標走行軌道を生成できる。しかしながら、学習モデルを用いて生成された目標走行軌道が必ずしも滑らかな軌道になるとは限らない。
本発明は、過去に車両が走行した走行軌跡に基づいて生成された目標走行軌道の利点を生かしつつ、より滑らかな目標走行軌道を生成することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様による走行制御方法では、自車両が走行する走行車線の自車両前方の車線形状を検出し、過去に車両が走行した走行軌跡に基づいて、自車両前方の走行車線における第1目標走行軌道を生成し、第1目標走行軌道に基づいて、自車両前方の走行車線における自車両が走行する走行領域を設定し、走行領域内を走行する第2目標走行軌道を、第2目標走行軌道の曲率及び曲率変化の少なくとも一方について予め設定した制約条件を満足するように生成し、第2目標走行軌道に沿って走行するように自車両を制御する。
【発明の効果】
【0006】
本発明によれば、過去に車両が走行した走行軌跡に基づいて生成された目標走行軌道の利点を生かしつつ、より滑らかな目標走行軌道を生成することができる。
【図面の簡単な説明】
【0007】
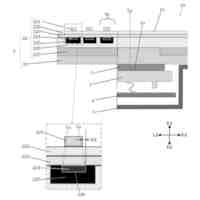
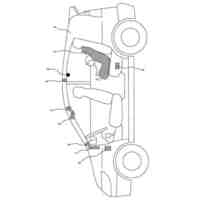
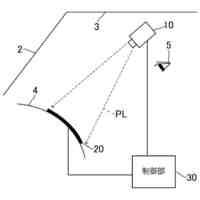
実施形態の走行制御装置の一例の概略構成図である。
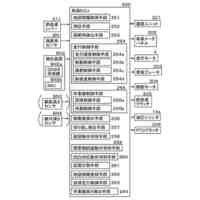
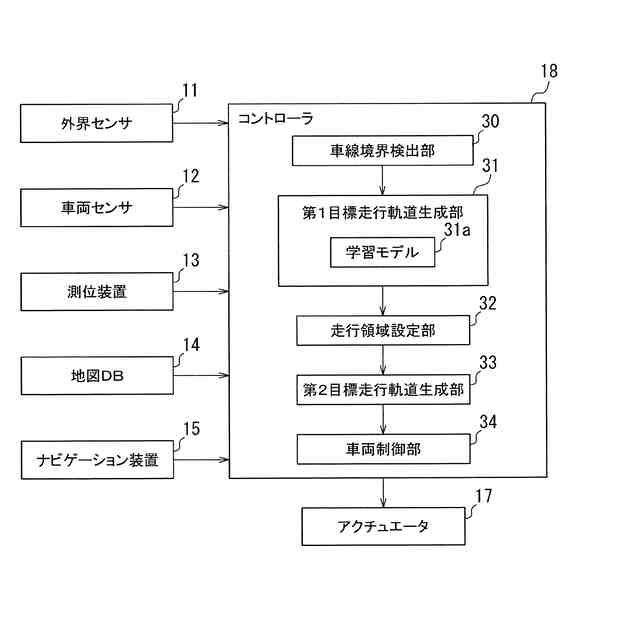
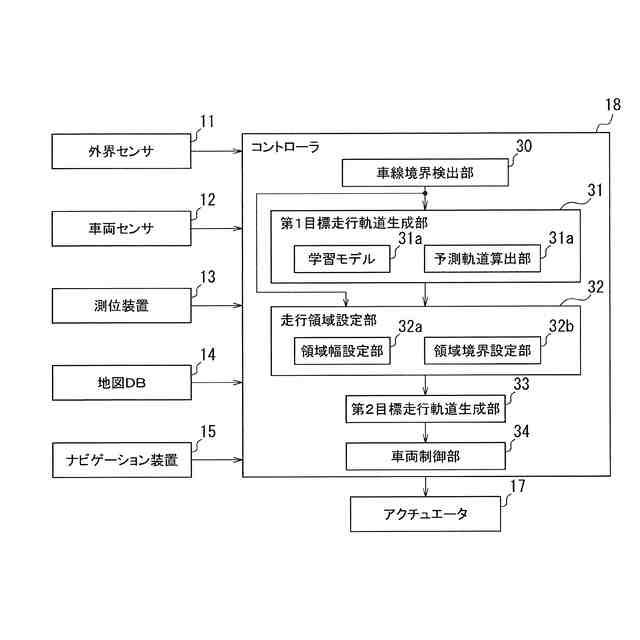
第1実施形態のコントローラの機能構成の一例のブロック図である。
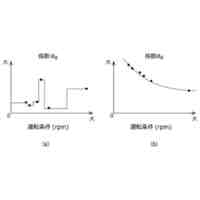
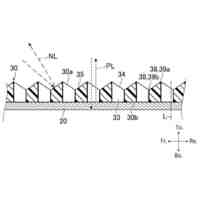
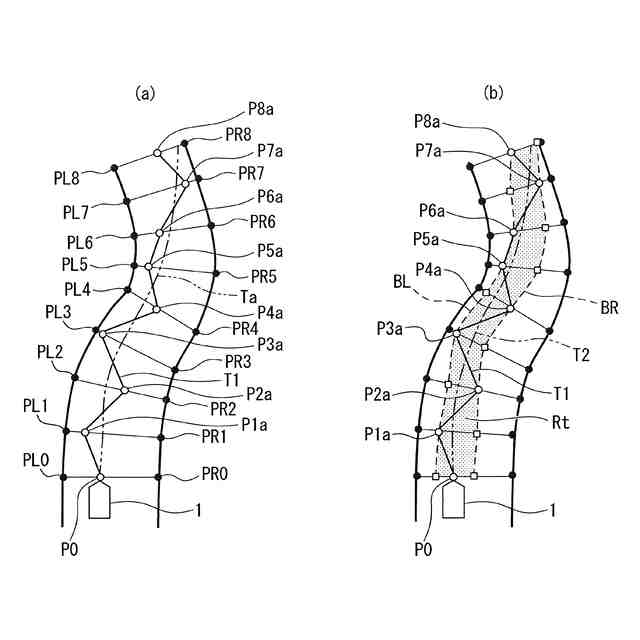
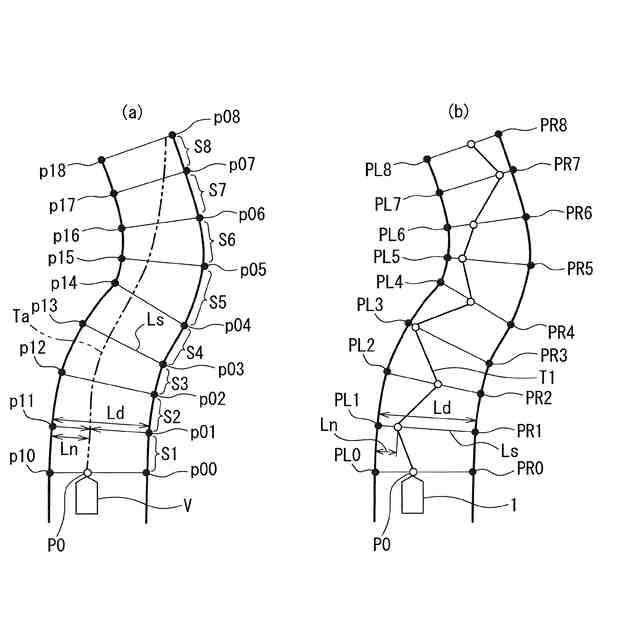
(a)は第1目標走行軌道の一例の模式図であり、(b)は走行領域及び第2目標走行軌道の一例の模式図である。
第1実施形態の走行制御方法の一例のフローチャートである。
第2実施形態のコントローラの機能構成の一例のブロック図である。
(a)は学習モデルの学習データの一例を説明する模式図であり、(b)は走行車線の車線形状のデータと第1目標走行軌道の一例の模式図である。
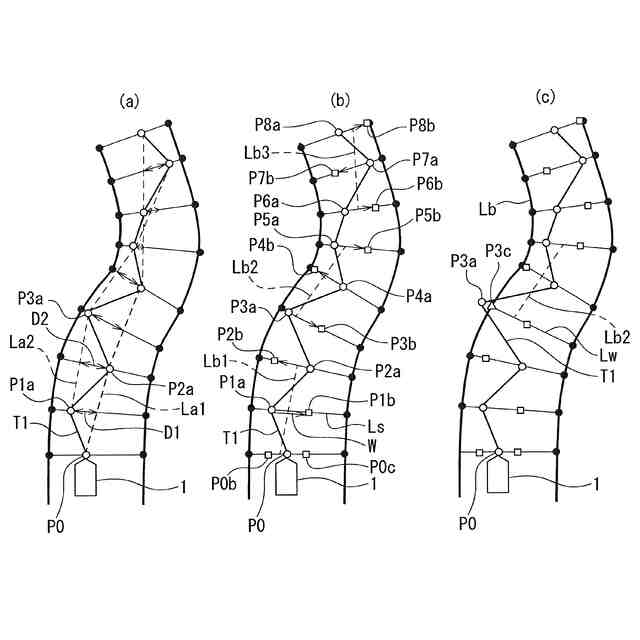
(a)~(c)は、第2実施形態の走行制御方法の一例を説明する模式図である。
第2実施形態の走行制御方法の一例のフローチャートである。
第3実施形態の走行制御方法の一例を説明する模式図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。また、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0009】
(第1実施形態)
(構成)
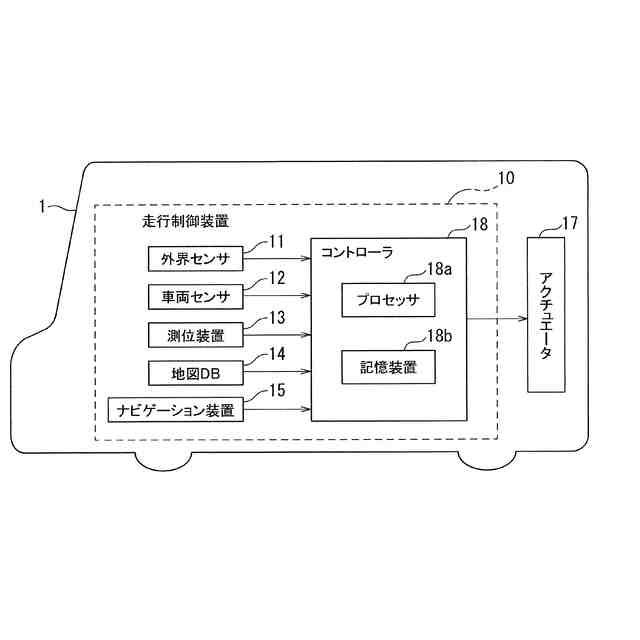
図1は、実施形態の走行制御装置の例の概略構成図である。自車両1は、自車両1の走行を制御する走行制御装置10を備える。走行制御装置10による走行制御は、自車両1が走行する車線である走行車線の車線形状に基づいて目標走行軌道を設定し、自車両1が目標走行軌道に沿って走行するように操舵機構を制御する自動制御を含む。例えば、走行制御装置10による走行制御は、自車両1の周辺の走行環境に基づいて、運転者が関与せずに自車両1を自動で運転する自律運転制御であってよい。
【0010】
走行制御装置10は、外界センサ11と、車両センサ12と、測位装置13と、地図データベース(地図DB)14と、ナビゲーション装置15、アクチュエータ17と、コントローラ18とを備える。
外界センサ11は、自車両1に搭載されたレーザレーダやミリ波レーダ、カメラ、LIDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)など、自車両1の周辺の物体を検出する複数の異なる種類の物体検出センサを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
光電変換装置
1日前
日産自動車株式会社
離散時間モデルの算出方法
1日前
日産自動車株式会社
路面摩擦係数推定方法及び路面摩擦係数推定装置
1日前
日産自動車株式会社
路面摩擦係数推定方法及び路面摩擦係数推定装置
1日前
日産自動車株式会社
ウインドレギュレータユニットの取付構造
1日前
個人
カーテント
1か月前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
日本精機株式会社
ケース
2か月前
個人
車輪清掃装置
1か月前
個人
ホイルのボルト締結
3日前
個人
キャンピングトライク
18日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
23日前
個人
キャンピングトレーラー
18日前
個人
アクセルのソフトウェア
8日前
個人
車両用スリップ防止装置
9日前
個人
ワイパーゴム性能保持具
1か月前
株式会社ニフコ
保持装置
2日前
日本精機株式会社
車載表示装置
4日前
井関農機株式会社
収穫作業車両
1か月前
株式会社クラベ
ヒータユニット
1か月前
個人
自動車ドア開度規制ベルト
2か月前
個人
車載小物入れ兼雨傘収納具
1日前
横浜ゴム株式会社
タイヤ
3か月前
井関農機株式会社
作業車両
15日前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用投影装置
25日前
帝国繊維株式会社
作業車両
2か月前
株式会社ユーシン
照明装置
2か月前
日本精機株式会社
車両用投影装置
25日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
9日前
トヨタ自動車株式会社
車両
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ