TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099943
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216956
出願日
2023-12-22
発明の名称
路面摩擦係数推定方法及び路面摩擦係数推定装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
40/068 20120101AFI20250626BHJP(車両一般)
要約
【課題】車輪を操舵するモータの駆動電流に基づく路面摩擦係数の推定精度を向上する。
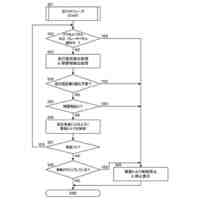
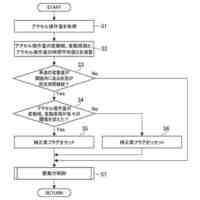
【解決手段】路面摩擦係数推定方法では、操舵輪を操舵する操舵モータの駆動電流の電流測定値を取得し(S2)、操舵輪を操舵する操舵機構における機械摩擦と、保舵状態の操舵輪に存在するタイヤねじれと、により発生する反力に相当する操舵トルクを発生するのに要する操舵モータの駆動電流をバイアス成分として推定し(S7、S10)、電流測定値からバイアス成分を減算した差分に基づいて、路面の第1摩擦係数を推定する(S11~S13)。
【選択図】図10
特許請求の範囲
【請求項1】
操舵輪を操舵する操舵モータの駆動電流の電流測定値を取得し、
前記操舵輪を操舵する操舵機構における機械摩擦と、保舵状態の前記操舵輪に存在するタイヤねじれと、により発生する反力に相当する操舵トルクを発生するのに要する前記操舵モータの駆動電流をバイアス成分として推定し、
前記電流測定値から前記バイアス成分を減算した差分に基づいて、路面の第1摩擦係数を推定する、
ことを特徴とする路面摩擦係数推定方法。
続きを表示(約 1,500 文字)
【請求項2】
前記操舵輪の操舵角の操舵角測定値を取得し、
前記操舵角測定値と前記電流測定値とに基づいて前記バイアス成分を推定する、
ことを特徴とする請求項1に記載の路面摩擦係数推定方法。
【請求項3】
前記操舵モータによる前記操舵輪の操舵中における前記電流測定値に基づいて前記タイヤねじれに起因する前記操舵輪のタイヤの残留モーメントの方向を推定することを特徴とする請求項2に記載の路面摩擦係数推定方法。
【請求項4】
前記操舵モータによる前記操舵輪の操舵の開始初期の前記電流測定値の正負に基づいて、前記残留モーメントの方向を推定する請求項3に記載の路面摩擦係数推定方法。
【請求項5】
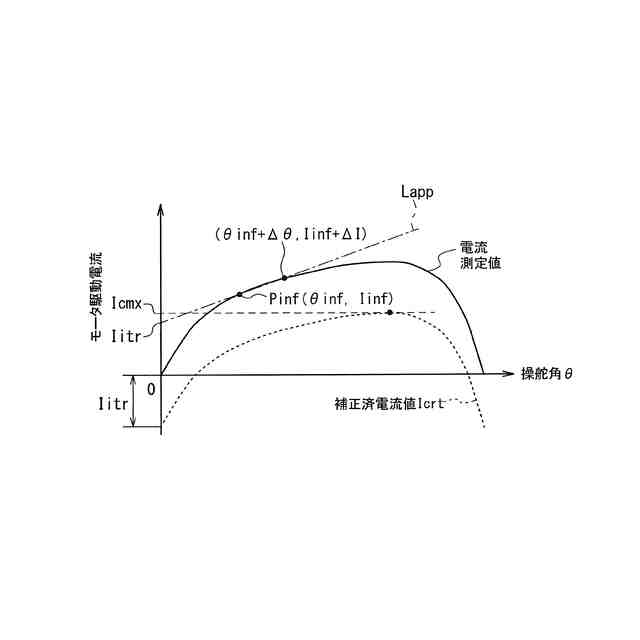
前記残留モーメントの方向と前記操舵モータによる前記操舵輪の操舵方向とが同じ場合に、前記操舵モータによる前記操舵輪の操舵中に前記電流測定値が減少から増加に転ずる第1操舵角を検出するとともに、前記第1操舵角における前記電流測定値を第1電流値として検出し、
前記操舵モータにより前記第1操舵角から更に同じ方向に前記操舵輪を操舵した第2操舵角における前記電流測定値を第2電流値として検出し、
前記第1操舵角及び前記第1電流値と、前記第2操舵角及び前記第2電流値とに基づいて前記操舵輪の操舵角と前記操舵モータの駆動電流との間の近似直線を算出し、
前記近似直線の切片を前記バイアス成分と推定する、
ことを特徴とする請求項3又は4に記載の路面摩擦係数推定方法。
【請求項6】
前記残留モーメントの方向と前記操舵モータによる前記操舵輪の操舵方向とが異なる場合に、前記操舵モータにより前記操舵輪を一定の操舵角速度で操舵したときの前記電流測定値の一階時間微分値が最大となる第1操舵角を検出するとともに、前記第1操舵角における前記電流測定値を第1電流値として検出し、
前記操舵モータにより前記第1操舵角から更に同じ方向に前記操舵輪を操舵した第2操舵角における前記電流測定値を第2電流値として検出し、
前記第1操舵角及び前記第1電流値と、前記第2操舵角及び前記第2電流値とに基づいて前記操舵輪の操舵角と前記操舵モータの駆動電流との間の近似直線を算出し、
前記近似直線の切片を前記バイアス成分と推定する、
ことを特徴とする請求項3又は4に記載の路面摩擦係数推定方法。
【請求項7】
前記操舵輪を所定の操舵角まで操舵したときの前記差分の最大値に基づいて前記第1摩擦係数を推定することを特徴とする請求項1~4のいずれか一項に記載の路面摩擦係数推定方法。
【請求項8】
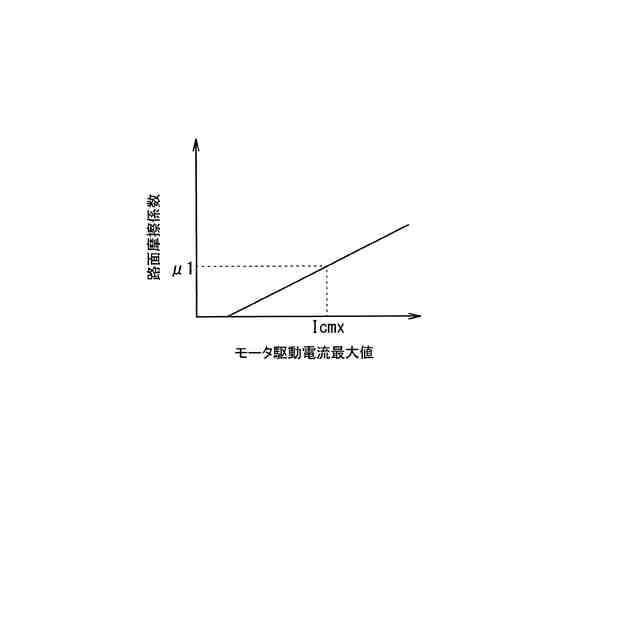
予め取得した前記操舵モータの駆動電流の最大値と路面の摩擦係数との間の関係と前記差分の最大値とに基づいて前記第1摩擦係数を推定することを特徴とする請求項7に記載の路面摩擦係数推定方法。
【請求項9】
前記操舵モータの駆動電流の最大値と前記摩擦係数との間の関係を予め同定する際に前記操舵モータにより前記操舵輪を操舵する操舵角速度と、前記第1摩擦係数を推定する際の操舵角速度と、を一致させることを特徴とする請求項8に記載の路面摩擦係数推定方法。
【請求項10】
予め取得した所定操舵角における操舵角変化に対する前記操舵モータの駆動電流の変化率と路面の摩擦係数との間の関係と、前記電流測定値と、に基づいて第2摩擦係数を推定し、
前記第2摩擦係数のばらつき幅に基づいて前記第1摩擦係数の推定結果を制限する、
ことを特徴とする請求項1~4のいずれか一項に記載の路面摩擦係数推定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、路面摩擦係数推定方法及び路面摩擦係数推定装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載の路面摩擦係数推定装置は、車両の停車中にモータにより左右後輪を所定角だけ操舵する際のモータ駆動電流に基づいて、路面摩擦係数を推定する。
【先行技術文献】
【特許文献】
【0003】
特開平10-288559号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
操舵角が変化しない保舵状態のタイヤには、タイヤ捩れ等によるモーメントが残留していることがある。操舵輪を操舵するモータが操舵を開始すると、残留モーメントがモータの駆動電流に影響して路面摩擦係数の推定精度が低下する虞がある。
本発明は、車輪を操舵するモータの駆動電流に基づく路面摩擦係数の推定精度を向上することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様による路面摩擦係数推定方法では、操舵輪を操舵する操舵モータの駆動電流の電流測定値を取得し、操舵輪を操舵する操舵機構における機械摩擦と、保舵状態の操舵輪に存在するタイヤねじれと、により発生する反力に相当する操舵トルクを発生するのに要する操舵モータの駆動電流をバイアス成分として推定し、電流測定値からバイアス成分を減算した差分に基づいて、路面の第1摩擦係数を推定する。
【発明の効果】
【0006】
本発明によれば、車輪を操舵するモータの駆動電流に基づく路面摩擦係数の推定精度を向上できる。
【図面の簡単な説明】
【0007】
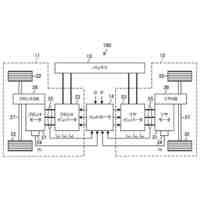
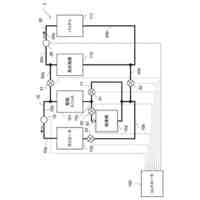
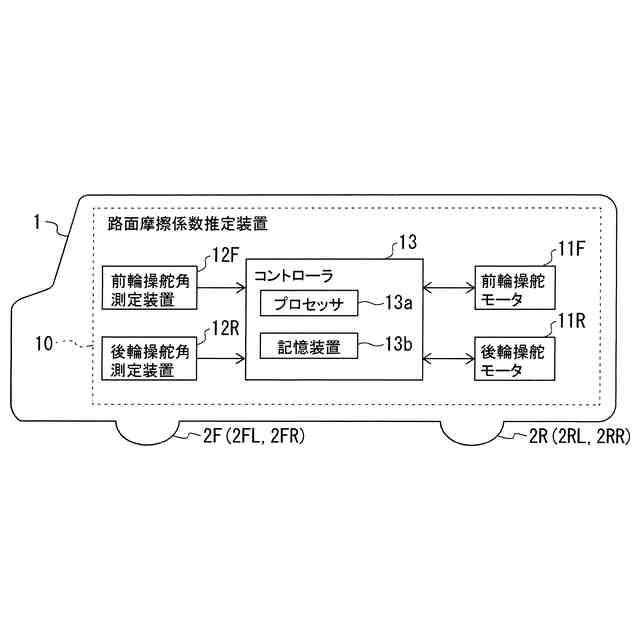
実施形態の路面摩擦係数推定装置の一例の概略構成図である。
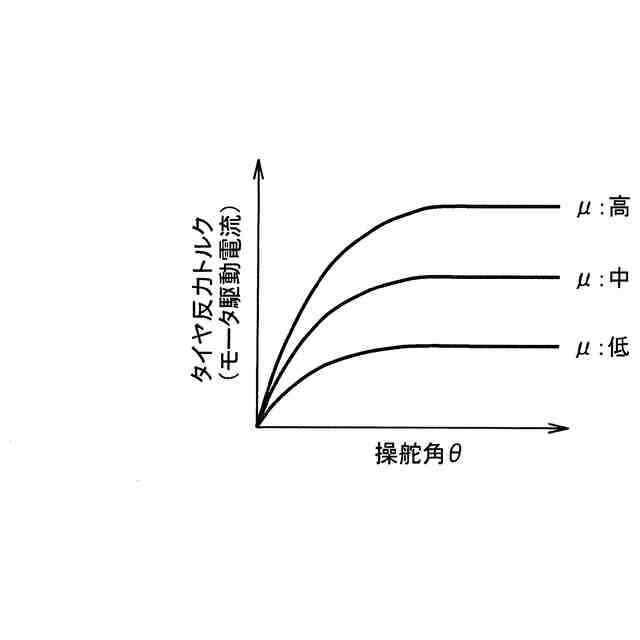
路面摩擦係数と操舵角に対するタイヤ反力トルクの特性図である。
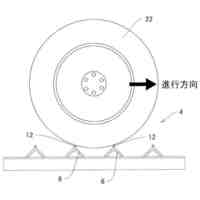
(a)はタイヤの残留モーメントを説明する模式図であり、(b)及び(c)は操舵トルクに対する残留モーメントの影響を説明する模式図である。
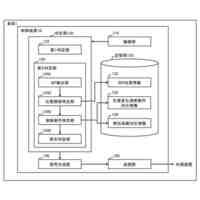
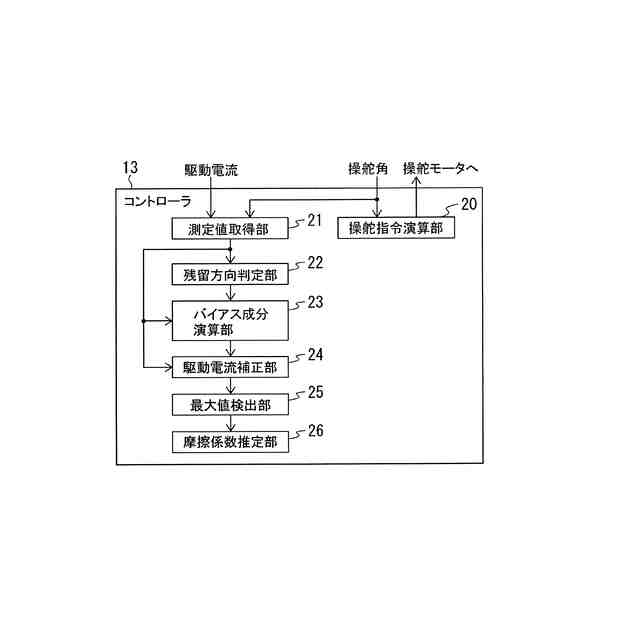
第1実施形態のコントローラの機能構成の例のブロック図である。
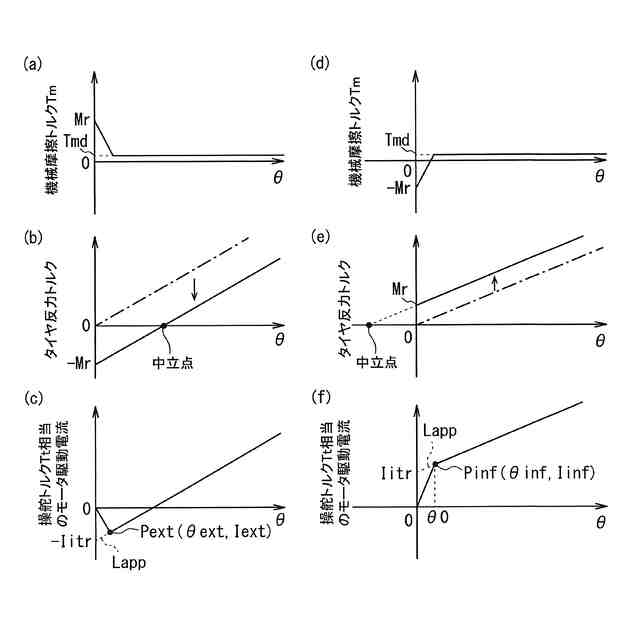
(a)~(f)は、操舵トルクに対する残留モーメントの影響の説明図である。
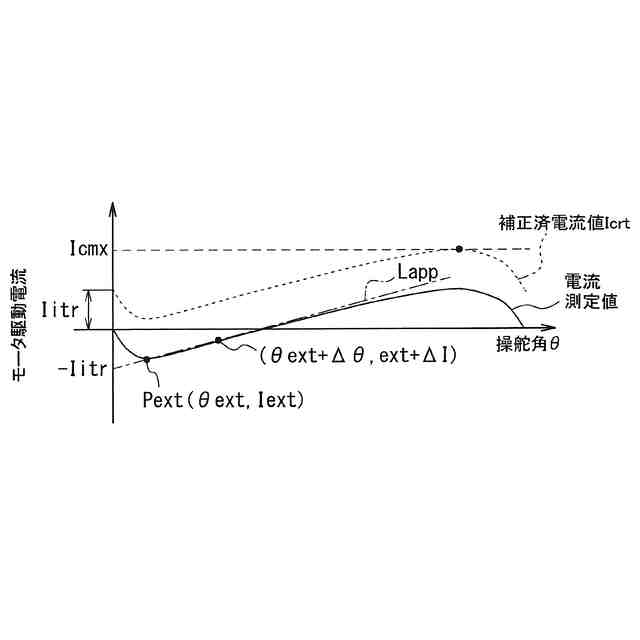
残留モーメントの方向と操舵モータによる操舵方向とが同じ場合(同相の場合)の電流測定値の補正の説明図である。
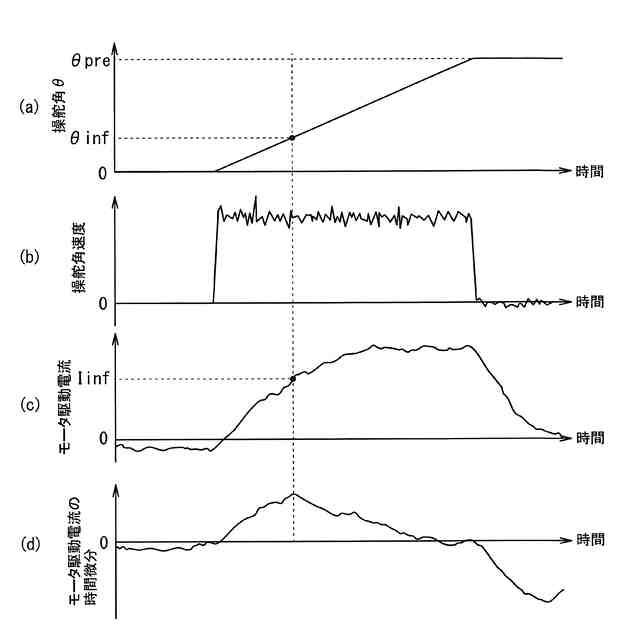
(a)~(d)は、モータ駆動電流の変曲点の検出の説明図である。
残留モーメントの方向と操舵モータによる操舵方向とが異なる場合(逆相の場合)の電流測定値の補正の説明図である。
モータ駆動電流の最大値と路面摩擦係数の関係の一例の説明図である。
第1実施形態の路面摩擦係数推定方法の一例のフローチャートである。
路面摩擦係数と操舵角に対するタイヤ反力トルクの特性図である。
第2実施形態のコントローラの機能構成の例のブロック図である。
(a)~(d)は、ブラッシュモデルによる路面摩擦係数と操舵角とタイヤ反力の関係の説明図である。
モータ駆動電流の変化率と路面摩擦係数の関係の一例の説明図である。
路面摩擦係数と操舵角に対するタイヤ反力モーメントの特性図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。また、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0009】
(第1実施形態)
(構成)
図1を参照する。実施形態の路面摩擦係数推定装置10は、前輪操舵モータ11Fと、後輪操舵モータ11Rと、前輪操舵角測定装置12Fと、後輪操舵角測定装置12Rと、コントローラ13を備える。以下の説明において、左前輪2FL及び右前輪2FRを総称して「前輪2F」と表記し、左後輪2RL及び右後輪2RRを総称して「後輪2R」と表記することがある。
【0010】
前輪操舵モータ11F及び後輪操舵モータ11Rは、コントローラ13から、操舵角指令値や操舵角速度指令値を受け取り、それを実現するために演算したモータ駆動電流で前輪2F及び後輪2Rの操舵角指令値や操舵角速度指令値を実現する。また、操舵に必要なモータ駆動電流を測定してコントローラ13に出力する。
例えば前輪2Fは、運転者が操作するステアリングホイールと、それに接続されたステアリングシャフトと、前輪2Fの車両1に対する角度を変化させることができる操舵機構とにより操舵される。前輪操舵モータ11Fは、運転者による操舵を補助する操舵補助トルクを操舵機構に付与する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
回転電機
8日前
日産自動車株式会社
位置補正部材
11日前
日産自動車株式会社
情報処理方法及び制御装置
今日
日産自動車株式会社
車両制御方法及び車両制御装置
5日前
日産自動車株式会社
車両制御方法及び車両制御装置
5日前
日産自動車株式会社
車両制御方法および車両制御装置
7日前
日産自動車株式会社
情報処理方法及び軸受寿命予測装置
7日前
日産自動車株式会社
移動物体認識方法及び移動物体認識装置
4日前
日産自動車株式会社
電動車両の制御方法及び電動車両システム
5日前
日産自動車株式会社
車両の駆動力制御方法および駆動力制御装置
1日前
日産自動車株式会社
車両の冷媒制御システム及び車両の冷媒制御方法
5日前
日産自動車株式会社
バッテリ暖気制御方法、及びバッテリ暖気制御装置
今日
日産自動車株式会社
電力変換装置の制御装置および電力変換装置の制御方法
今日
日産自動車株式会社
地図情報更新装置及び地図情報更新方法
4日前
個人
カーテント
2か月前
個人
タイヤレバー
6日前
個人
警告装置
3か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
日本精機株式会社
ケース
3か月前
個人
ホイルのボルト締結
1か月前
個人
車輪清掃装置
2か月前
日本精機株式会社
照明装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4日前
日本精機株式会社
表示装置
4日前
日本精機株式会社
表示装置
4日前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
個人
アンチロール制御装置
4か月前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトライク
1か月前
井関農機株式会社
作業車両
1か月前
個人
車両通過構造物
7日前
日本精機株式会社
表示装置
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ