TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024160931
公報種別
公開特許公報(A)
公開日
2024-11-15
出願番号
2024027658
出願日
2024-02-27
発明の名称
協調シミュレータの動作を制御するシステムおよび方法
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G16Z
99/00 20190101AFI20241108BHJP(特定の用途分野に特に適合した情報通信技術)
要約
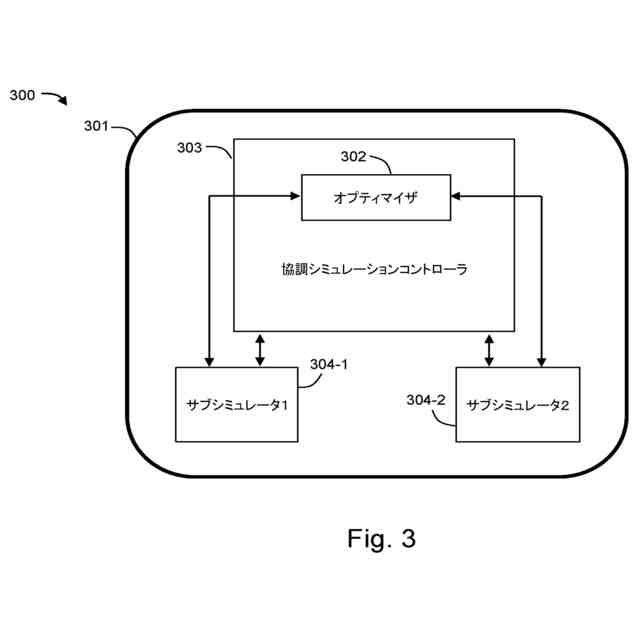
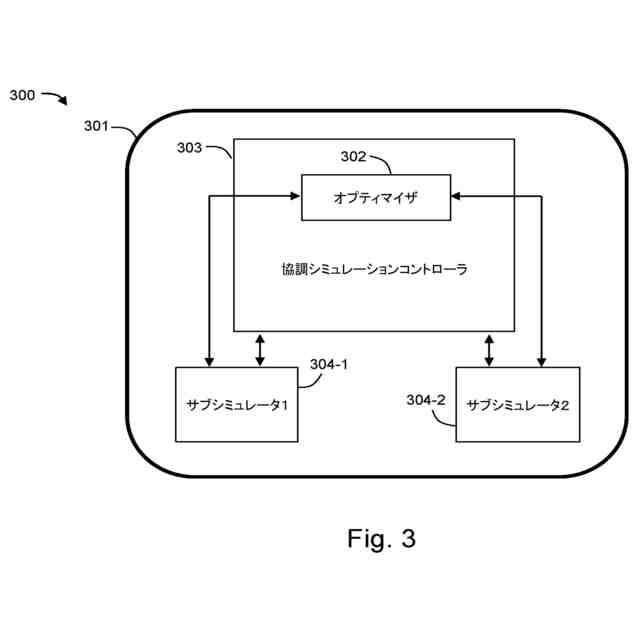
【課題】第2のシステムのそれぞれのサブシステムの振舞いをシミュレートするように構成された、2つ以上のサブシミュレータ304-1、304-2を備える協調シミュレータの動作を制御するシステムを提供する。
【解決手段】協調シミュレータは、サブシミュレータの出力が第2のシステムの1つまたは複数の特性の値を決定すべく組み合され、システムは、サブシミュレータのうちの1つまたは複数によって実行された中間計算の結果を、1つまたは複数の時点で受け取り、受け取られた結果の入力を調整することを行うように構成されたコントローラと、第2のシステムのその1つまたは複数の特性の値を決定するプロセスを最適化するように調整すべき協調シミュレータの1つまたは複数の要素を、その1つまたは複数の時点のそれぞれで、中間計算の結果に基づいて決定するように構成されたオプティマイザ302とを備える。
【選択図】図3
特許請求の範囲
【請求項1】
各サブシミュレータが第2のシステムのそれぞれのサブシステムの振舞いをシミュレートするように構成された、2つ以上のサブシミュレータを備える協調シミュレータの動作を制御するシステムであって、
前記協調シミュレータは、前記2つ以上のサブシミュレータの出力が前記第2のシステムの1つまたは複数の特性の値を決定すべく組み合わされる、シミュレーションの1回または複数回のイテレーションを実行するように構成され、前記システムは、
前記2つ以上のサブシミュレータのうちの1つまたは複数によって実行された複数の中間計算の複数の結果を、前記シミュレーションのイテレーション中、1つまたは複数の時点で受け取り、かつ、前記イテレーションの過程で実行されるべき後続の複数の計算において使用されるように前記2つ以上のサブシミュレータのうちの他のサブシミュレータに対する、前記受け取られた複数の結果の入力を調整することを行うように構成されたコントローラと、
前記協調シミュレータの1つまたは複数の要素を、前記1つまたは複数の時点のそれぞれで、前記複数の中間計算の前記複数の結果に基づいて決定するように構成されたオプティマイザと
を備えるシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記1つまたは複数のサブシミュレータは、それぞれの複数のモデルを実行することによって前記それぞれの複数のサブシステムの前記振舞いをシミュレートし、前記協調シミュレータの前記1つまたは複数の要素は、前記複数のモデルのうちの少なくとも1つのモデルの1つまたは複数のパラメータを備える、請求項1に記載のシステム。
【請求項3】
前記オプティマイザは、前記複数のモデルのうちの少なくとも1つのモデルの前記1つまたは複数のパラメータを調整するように構成される、請求項2に記載のシステム。
【請求項4】
前記協調シミュレータの前記1つまたは複数の要素は、前記1つまたは複数のサブシミュレータによって前記コントローラに前記複数の中間計算の前記複数の結果が出力される時間間隔を含む、請求項1に記載のシステム。
【請求項5】
前記オプティマイザは、前記複数の中間計算の前記複数の結果のうちの1つまたは複数が複数の値の所定の範囲外にある場合、前記シミュレーションのイテレーションを中止するように構成される、請求項1に記載のシステム。
【請求項6】
前記第2のシステムの1つまたは複数の特性の前記値は、前記第2のシステムの性能の基準を含む、請求項1に記載のシステム。
【請求項7】
前記シミュレーションのイテレーションごとに、前記2つ以上のサブシミュレータに、1つまたは複数の入力値が与えられ、
前記オプティマイザは、前記第2のシステムの前記1つまたは複数の特性の推定された値に基づいて、次のイテレーションにおいて使用すべき改定されたセットの入力値を決定するように構成される、請求項1に記載のシステム。
【請求項8】
前記改定されたセットの入力値は、最適化アルゴリズムを使用して決定され、前記最適化アルゴリズムは、前記第2のシステムの前記1つまたは複数の特性に関して最適な値をもたらすセットの入力値を決定する、請求項7に記載のシステム。
【請求項9】
前記協調シミュレータは、前記第2のシステムの2つ以上の特性の複数の値を決定するように構成され、前記最適化アルゴリズムは、前記第2のシステムの前記2つ以上の特性の前記複数の値を共同で最適化するセットの入力値を決定するように選択される、請求項8に記載のシステム。
【請求項10】
前記オプティマイザは、前記協調シミュレータが前記シミュレーションの複数回のイテレーションを実行する過程で代替の最適化アルゴリズムを使用することに切り替えるように構成される、請求項8に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書において説明される実施形態は、2つ以上のサブシミュレータを備える協調シミュレータの動作を制御するシステムおよび方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、単純なルックアップテーブルを含む低次元化されたモデルが、しばしば、複数のサブシステムを有する複雑なシステムのシミュレーションのために使用される。そのようなアプローチは、適度に短い時間内で結果をもたらすことが可能である一方で、いくつかの過渡効果を識別することも、調べることも、正確な全体的なシステムパフォーマンスを得ることもできない。したがって、システムシミュレーションの結果の品質を最大限にするために、可能な限り詳細なモデルを使用することが不可欠である。
【0003】
以上の結果として、連成シミュレーション構造、または協調シミュレーションにますます向かう動向が存在する。協調シミュレーションとは、しばしば、異なる環境にある、全体的なより大きいシステムの異なるサブシステムをモデリングする、またはシミュレートするのに使用され得る、緩く結合されたスタンドアローンのサブシミュレータの共同シミュレーションを指す。例えば、自動車業界および航空宇宙業界において多くの用途が存在するので、いくつかの製品が、この種類のシステムシミュレーションのためのサポートを、現在、提供する。
【0004】
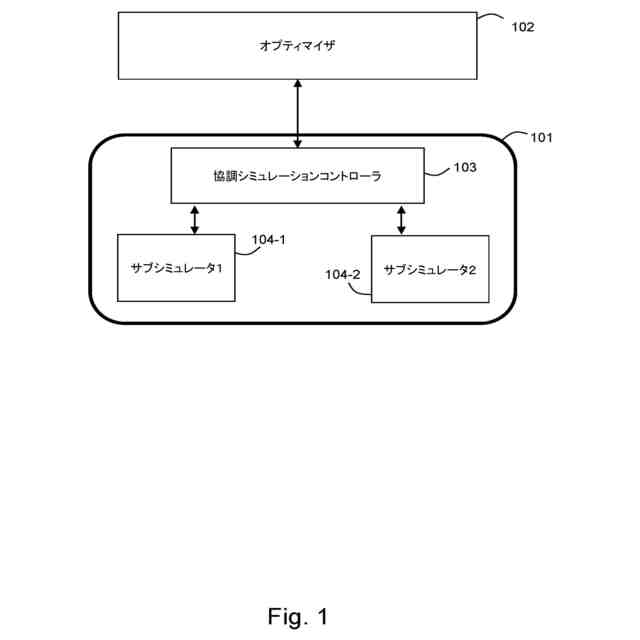
協調シミュレーションを実装する際、各モデル間のデータフローは、協調シミュレータがシステム全体の全体的なシミュレーションを制御することを可能にする定義された構造を使用して実現される。協調シミュレーションアルゴリズムが、サブシミュレータにわたる時間同期および対話に対処する。サブシミュレータは、協調シミュレーションコントローラによって実施される通信ポイント間で互いに完全に独立であるものと想定される。サブシミュレータは、様々なソフトウェアアプローチまたはシミュレーションアプローチを使用してよく、電磁領域、熱領域、または機械領域などの様々なシミュレーション領域において動作してよい。
【0005】
サブシミュレータは、概念上、ブラックボックスのように振る舞い、他のサブシミュレータから入力を受け付け、組み込まれたソルバルーチンと一緒に次の通信ポイントまで時間的に前進し、結果を最終的に出力する。これらの結果は、次に、他のサブシミュレータに対する入力として再び使用されてよい。
【0006】
協調シミュレーションは、特定のセットの入力値およびパラメータを所与として、システムがどれだけよい性能を発揮する可能性があるかについての有用な情報を提供し得るものの、そのシステムの性能を最適化するように協調シミュレーションを使用することは、困難であり得る。従来、個々のサブシステムは、1つのサブシミュレータの入力値およびパラメータの変化が、別のサブシミュレータの性能にどのように影響を及ぼす可能性があるかを考慮に入れることなしに、互いに独立に最適化される。他の方法において、協調シミュレーションからの最終的な出力が、最適化アルゴリズムに供給される大域アプローチが使用されてよい。しかし、そのような大域最適化は、個々のサブシステムによって課される制約を考慮に入れることをしない可能性があり、システムの個々の部分からの最適未満の出力につながる可能性がある。
【0007】
次に、添付の図面を参照して例として実施形態について説明される。
【図面の簡単な説明】
【0008】
従来の協調シミュレータの例示的な構造を示す図。
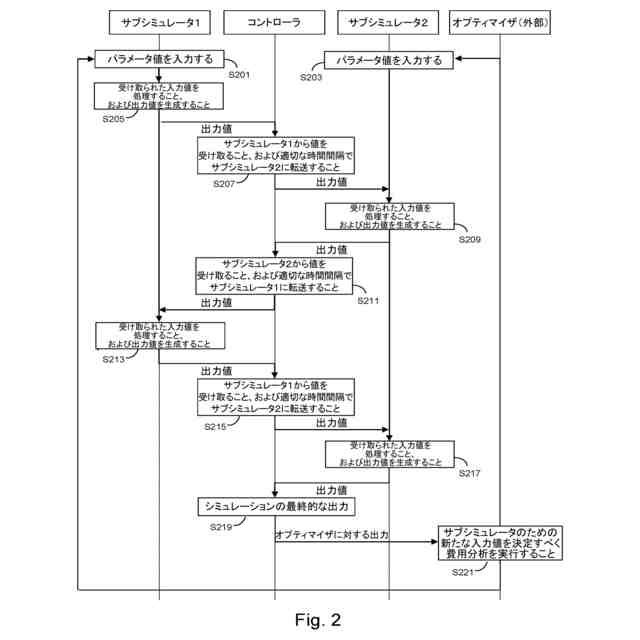
図1の協調シミュレータによって実行される動作の例示的なシークエンスを示す図。
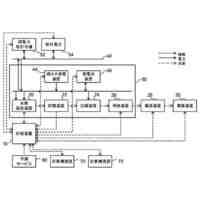
実施形態による協調シミュレータの構造を示す図。
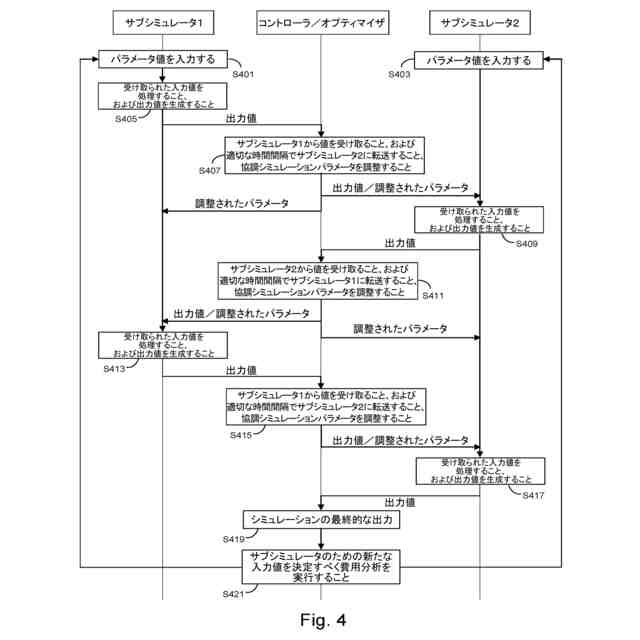
図3の協調シミュレータによって実行される動作の例示的なシークエンスを示す図。
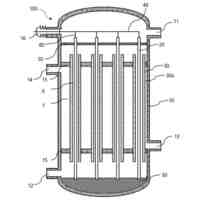
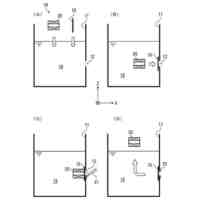
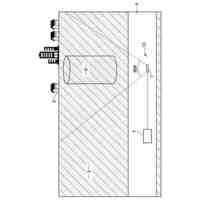
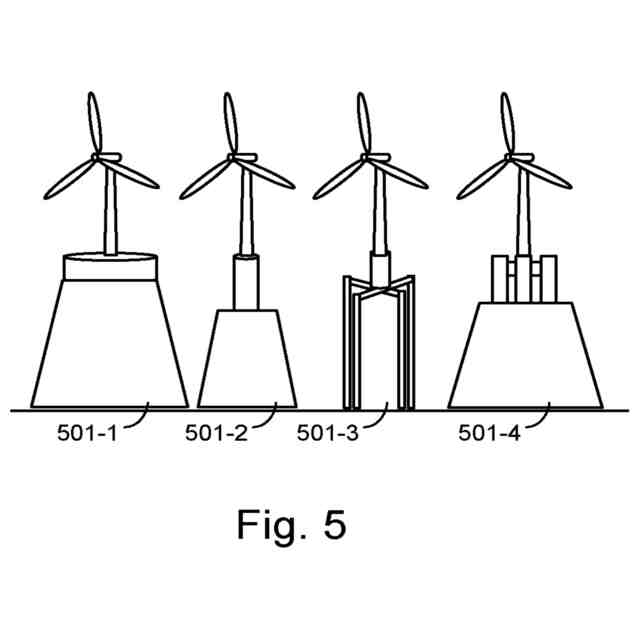
洋上風力タービンのための様々なタイプの浮体構造物を示す概略図。
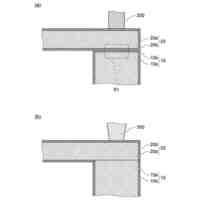
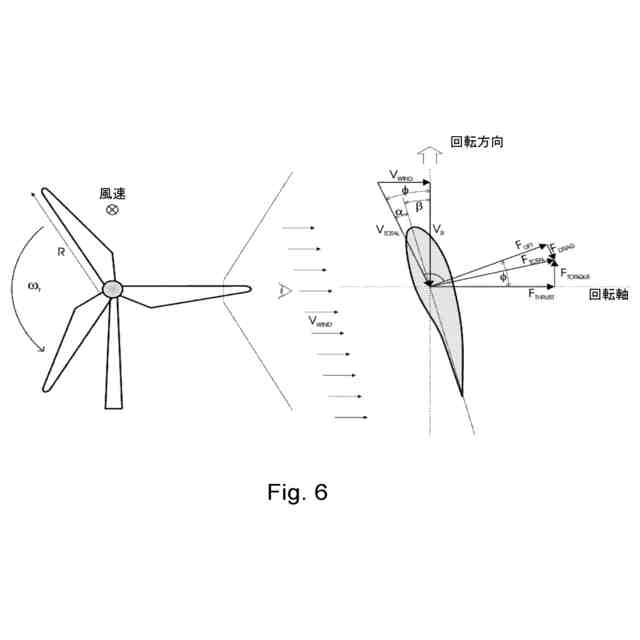
図5に示されるタービンから出力される電力を最適化するために調整されてよい複数のブレード制御パラメータを示す図。
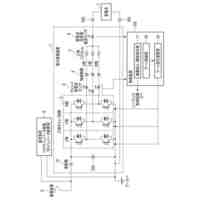
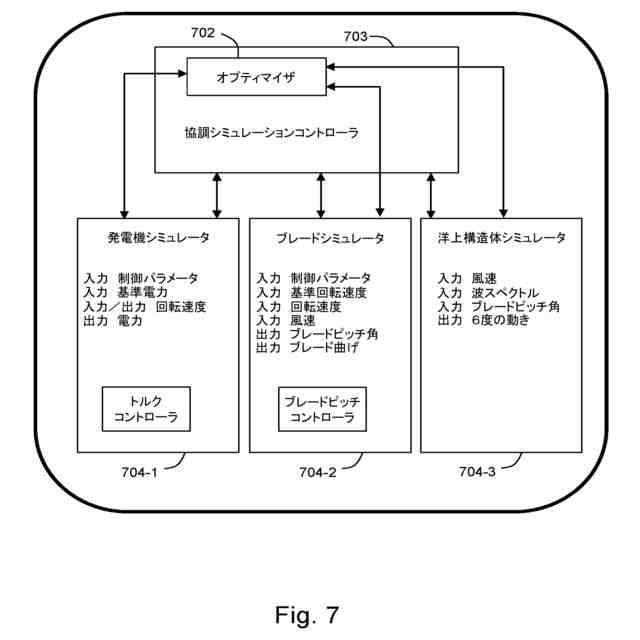
実施形態による風力タービンの機能をシミュレートするのに使用するための協調シミュレータを示す概略図。
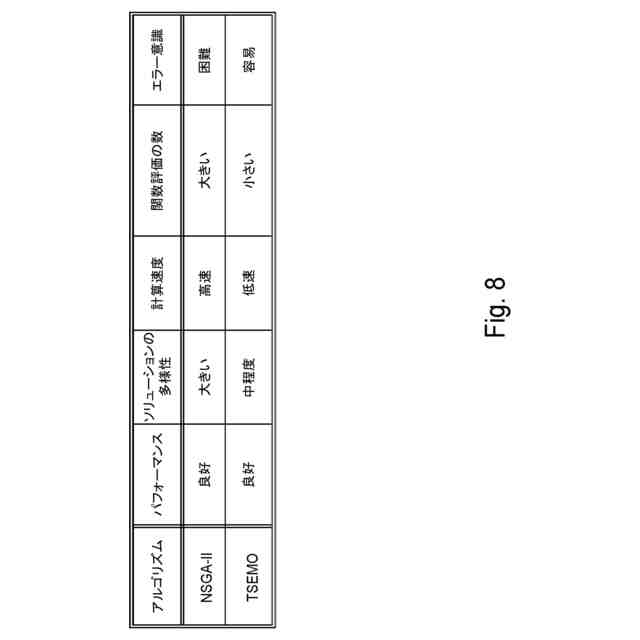
本明細書において説明される実施形態において使用するための様々なタイプの最適化アルゴリズムの特性の比較を示す表。
【発明を実施するための形態】
【0009】
第1の実施形態によれば、各サブシミュレータが第2のシステムのそれぞれのサブシステムの振舞いをシミュレートするように構成された、2つ以上のサブシミュレータを備える協調シミュレータの動作を制御するシステムが、提供され、協調シミュレータは、サブシミュレータの出力が第2のシステムの1つまたは複数の特性の値を決定すべく組み合わされる、シミュレーションの1回または複数回のイテレーションを実行するように構成され、システムは、
サブシミュレータのうちの1つまたは複数によって実行された中間計算の結果を、シミュレーションの各イテレーション中、1つまたは複数の時点で受け取り、かつイテレーションの過程で実行されるべき後続の計算において使用されるようにサブシミュレータのうちの他のサブシミュレータに対する、受け取られた結果の入力を調整することを行うように構成されたコントローラと、
第2のシステムのその1つまたは複数の特性の値を決定するプロセスを最適化するように調整すべき協調シミュレータの1つまたは複数の要素を、その1つまたは複数の時点のそれぞれで、中間計算の結果に基づいて決定するように構成されたオプティマイザとを備える。
【0010】
1つまたは複数のサブシミュレータは、それぞれのモデルを実行することによってそれぞれのサブシステムの振舞いをシミュレートしてよい。協調シミュレータの1つまたは複数の要素は、モデルのうちの少なくとも1つのモデルの1つまたは複数のパラメータを備えてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
除去装置
24日前
株式会社東芝
計画装置
10日前
株式会社東芝
真空バルブ
26日前
株式会社東芝
駅務システム
11日前
株式会社東芝
合成ユニット
1か月前
株式会社東芝
電力変換装置
12日前
株式会社東芝
靴用絶縁カバー
1か月前
株式会社東芝
レーザ溶接方法
1か月前
株式会社東芝
開閉器駆動装置
18日前
株式会社東芝
オゾン発生装置
12日前
株式会社東芝
ガス絶縁開閉装置
12日前
株式会社東芝
埋込磁石型モータ
1か月前
株式会社東芝
液体の貯蔵タンク
10日前
株式会社東芝
無停電電源システム
1か月前
株式会社東芝
センサ及び検査装置
3日前
株式会社東芝
二酸化炭素回収設備
18日前
株式会社東芝
電解セル及び電解装置
10日前
株式会社東芝
保護協調曲線作成装置
10日前
株式会社東芝
電子回路及び計算装置
1か月前
株式会社東芝
開閉式ケーブルラック
1か月前
株式会社東芝
加速器及び加速システム
19日前
株式会社東芝
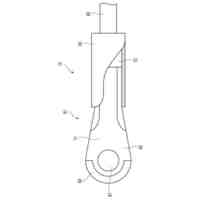
リンク機構及びロボット
1か月前
株式会社東芝
券売機及び券売機の発券方法
1か月前
株式会社東芝
制御装置、及び発電システム
1か月前
株式会社東芝
漏洩止水装置及び漏洩止水方法
1か月前
株式会社東芝
磁気記録媒体及び磁気記録装置
1か月前
株式会社東芝
情報生成装置、及び情報生成方法
18日前
株式会社東芝
地下工事の検査方法及び検査装置
25日前
株式会社東芝
端子、電線、電気部品及び電気盤
1か月前
株式会社東芝
電源装置および直流き電システム
10日前
株式会社東芝
搬送物停止装置及び搬送ユニット
1か月前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
3日前
株式会社東芝
結露防止システム及び結露防止方法
1か月前
株式会社東芝
セラミックスウエハとその製造方法
18日前
株式会社東芝
方法、情報処理装置およびシステム
10日前
株式会社東芝
地盤補修工事の検査方法及び検査装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ