TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024155426
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023070127
出願日
2023-04-21
発明の名称
触感または物性の評価方法、および触感または物性の評価装置
出願人
花王株式会社
代理人
個人
主分類
G01N
11/00 20060101AFI20241024BHJP(測定;試験)
要約
【課題】複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す指標を算出し、算出した指標に基づいて時間の経過に伴い変化する物体の触感または当該触感を生み出す物性を評価する評価方法、および、触感または物性の評価装置を提供する。
【解決手段】評価方法は、所定の剤が適用された物体に接触させた動作体を繰り返し動作させて物体と動作体との間に生じる力学的物理量の時系列データを取得する取得工程と、取得した力学的物理量の時系列データから所定期間ごとに複数種類の特徴量を算出する特徴量算出工程と、複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す指標を算出する指標算出工程と、算出した指標に基づいて時間の経過に伴い変化する物体の触感または当該触感を生み出す物性を評価する評価工程と、を含む。
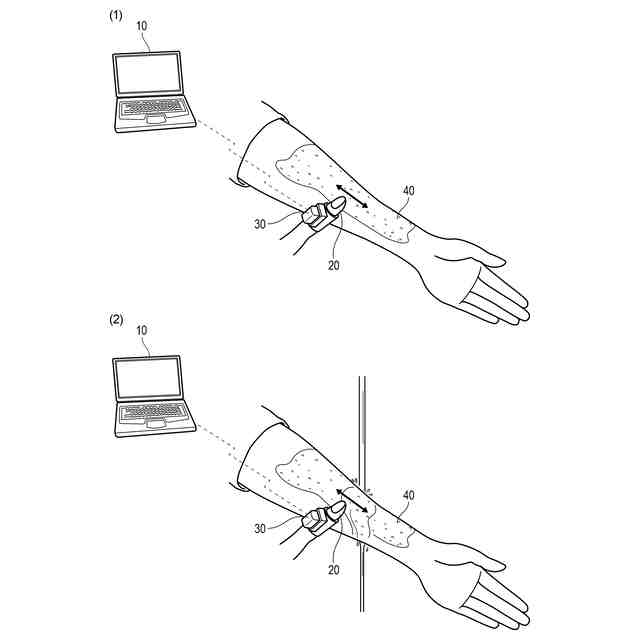
【選択図】図1
特許請求の範囲
【請求項1】
所定の剤が適用された物体に接触させた動作体を繰り返し動作させて前記物体と前記動作体との間に生じる力学的物理量の時系列データを取得する取得工程と、
前記取得した力学的物理量の時系列データから所定期間ごとに複数種類の特徴量を算出する特徴量算出工程と、
前記複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す指標を算出する指標算出工程と、
算出した前記指標に基づいて時間の経過に伴い変化する前記物体の触感または当該触感を生み出す物性を評価する評価工程と、を含む評価方法。
続きを表示(約 1,900 文字)
【請求項2】
前記指標算出工程は、前記指標と前記複数種類の特徴量のうち何れかの特徴量との、ずれ度合いを算出し、
前記評価工程は、前記ずれ度合いに基づいて時間の経過に伴い変化する前記物体の触感または当該触感を生み出す物性を評価する請求項1に記載の評価方法。
【請求項3】
前記複数種類の特徴量は、前記力学的物理量、前記力学的物理量の統計量、前記力学的物理量または前記力学的物理量の統計量の所定閾値以上の値であるスパイク信号量、ならびに前記力学的物理量の統計量である平均値またはばらつきから算出した特徴量の少なくとも1つを含む請求項1または2に記載の評価方法。
【請求項4】
前記評価工程は、前記力学的物理量の大きさと前記スパイク信号量の大きさとの相関関係に基づき、前記物体の触感または当該触感を生み出す物性を評価する請求項3に記載の評価方法。
【請求項5】
前記指標算出工程は、前記指標として前記複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す回帰線を算出し、
前記評価工程は、前記複数種類の特徴量のうち何れかの特徴量と前記回帰線と、に基づいて時間の経過に伴い変化する前記物体の触感または当該触感を生み出す物性を評価する請求項1に記載の評価方法。
【請求項6】
前記所定の剤は、評価対象の剤を含む複数種類の剤であり、前記物体には前記複数種類の剤がそれぞれ適用され、
前記取得工程は、前記複数種類の剤毎に前記力学的物理量の時系列データを取得し、
前記特徴量算出工程は、前記複数種類の剤毎に前記複数種類の特徴量を算出し、
前記指標算出工程は、
前記複数種類の剤の前記複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す標準指標と、
前記標準指標と前記評価対象の剤の前記複数種類の特徴量のうち何れかの特徴量との、ずれ度合いと、をさらに算出し、
前記評価工程は、前記ずれ度合いに基づいて前記評価対象の剤を適用したときの前記物体の触感または当該触感を生み出す物性を評価する請求項1に記載の評価方法。
【請求項7】
前記物体は、評価対象の物体を含む複数種類の物体であり、前記所定の剤は前記複数種類の物体それぞれに適用され、
前記取得工程は、前記複数種類の物体毎に前記力学的物理量の時系列データを取得し、
前記特徴量算出工程は、前記複数種類の物体毎に前記複数種類の特徴量を算出し、
前記指標算出工程は、
前記複数種類の物体の前記複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す標準指標と、
前記標準指標と前記評価対象の物体の前記複数種類の特徴量のうち何れかの特徴量との、ずれ度合いと、をさらに算出し、
前記評価工程は、前記ずれ度合いに基づいて前記所定の剤を適用したときの前記評価対象の物体の触感または当該触感を生み出す物性を評価する請求項1に記載の評価方法。
【請求項8】
前記所定の剤が適用された前記物体の環境が異なり、評価対象の環境を含む複数種類の環境があり、
前記取得工程は、前記複数種類の環境毎に前記力学的物理量の時系列データを取得し、
前記特徴量算出工程は、前記複数種類の環境毎に前記複数種類の特徴量を算出し、
前記指標算出工程は、
前記複数種類の環境の前記複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す標準指標と、
前記標準指標と前記評価対象の環境の前記複数種類のうち何れかの特徴量との、ずれ度合いと、をさらに算出し、
前記評価工程は、前記ずれ度合いに基づいて前記評価対象の環境で前記所定の剤を適用したときの前記物体の触感または当該触感を生み出す物性を評価する請求項1に記載の評価方法。
【請求項9】
前記評価工程は、前記標準指標に対して、ばらつきの乖離量またはスパイク信号量の乖離量に基づき前記所定の剤を適用したときの前記物体または当該触感を生み出す物性を評価する請求項6から8いずれか一項に記載の評価方法。
【請求項10】
前記評価工程は、前記乖離量の時間変化に基づき前記所定の剤を適用したときの前記物体の触感の経時的な変化または当該触感を生み出す物性の経時的な変化を評価する請求項9に記載の評価方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の剤の触感または物性の評価方法、および、所定の剤の触感または物性の評価装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
肌等に塗布された化粧料に動作体を接触させながら動作体を動かすことにより生じる振動を検出し、検出した振動の周波数スペクトルの経時的変化に基づき化粧料の使用触感を評価する評価方法がある(特許文献1)。
また、皮膚の表面における、平均摩擦係数及び/又は平均摩擦係数の変動係数と皮膚についての官能評価との相関性を用いて皮膚の状態を評価する方法がある(特許文献2)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/039466号
特開2003-24282号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1は、振動の強度の時間変化を数値化しているにすぎず、触感の特徴やその変化について適切な評価を行うことができていなかった。
特許文献2は、平均摩擦係数と官能評価の相関性および平均摩擦係数の変動係数と官能評価の相関性は記載されているが、特徴量同士の相関性について検討されていなかった。
【0005】
本発明は上記の課題に鑑みてなされたものであり、所定の剤が適用された物体と動作体を動作させたことにより物体との間に生じる力学的物理量の時系列データから算出した複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す指標を算出し、算出した指標に基づいて時間の経過に伴い変化する物体の触感または物性の評価方法、および触感または物性の評価装置に関するものである。
【課題を解決するための手段】
【0006】
本発明は、所定の剤が適用された物体に接触させた動作体を繰り返し動作させて前記物体と前記動作体との間に生じる力学的物理量の時系列データを取得する取得工程と、前記取得した力学的物理量の時系列データから所定期間ごとに複数種類の特徴量を算出する特徴量算出工程と、前記複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す指標を算出する指標算出工程と、算出した前記指標に基づいて時間の経過に伴い変化する前記物体の触感または当該触感を生み出す物性を評価する評価工程と、を含む評価方法に関する。
【0007】
また、本発明は、所定の剤が適用された物体に接触させた動作体を繰り返し動作させて前記物体と前記動作体との間に生じる力学的物理量の時系列データを取得する取得手段と、前記取得した力学的物理量の時系列データから所定期間ごとに複数種類の特徴量を算出する特徴量算出手段と、前記複数種類の特徴量のうち少なくとも2種類の特徴量の相関関係を示す指標を算出する指標算出手段と、算出した前記指標に基づいて時間の経過に伴い変化する前記物体の触感または当該触感を生み出す物性を評価する評価工程と、を含む評価装置に関する。
【発明の効果】
【0008】
本発明により提供される方法によれば、物体と動作体との間に生じる力学的物理量の時系列データにおいて、力学的物理量の時系列データから算出した複数種類の特徴量の相関関係を示す指標を算出し、算出した指標を用いて触感の特徴やその変化または当該触感を生み出す物性について評価することが可能となる。
また、本発明により提供される装置によれば、物体と動作体との間に生じる力学的物理量の時系列データにおいて、力学的物理量の時系列データから算出した複数種類の特徴量の相関関係を示す指標を算出し、算出した指標を用いて触感の特徴やその変化または当該触感を生み出す物性について評価することが可能となる。
【図面の簡単な説明】
【0009】
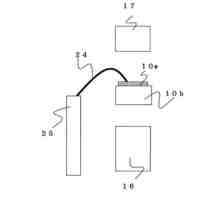
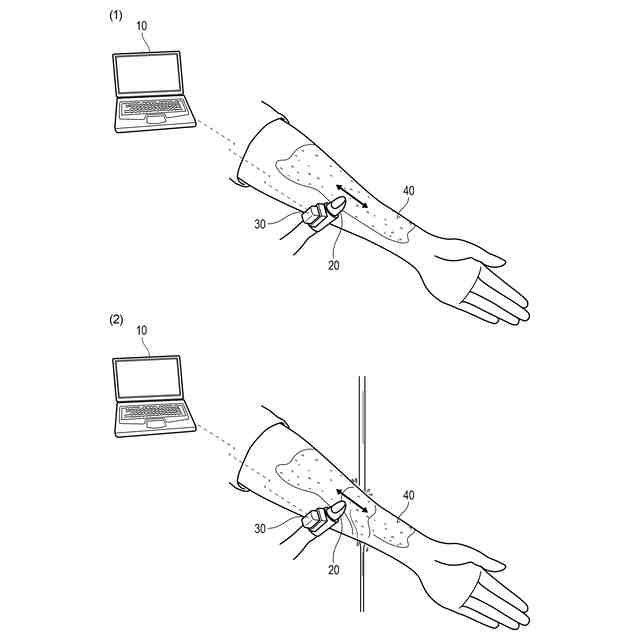
(1)は洗浄時の評価者の肌表面にセンサを装着した指を接触させるイメージ図であり、(2)はすすぎ時の評価者の肌表面にセンサを装着した指を接触させるイメージ図である。
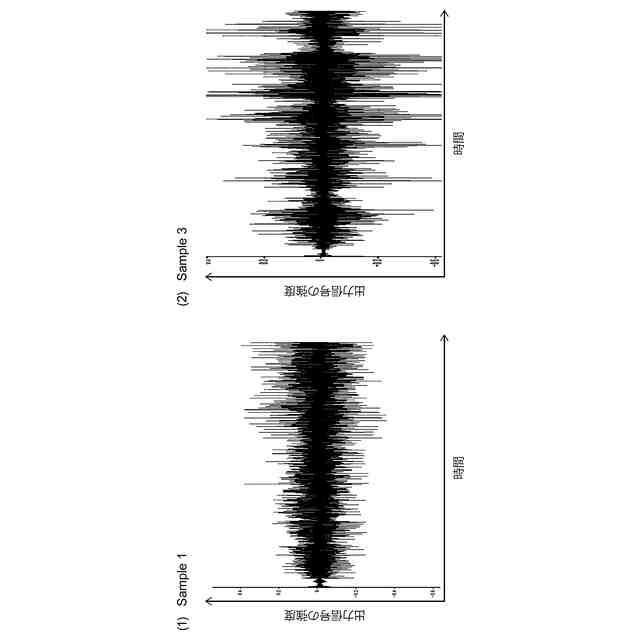
(1)はSample1の時系列波形信号を示す図であり、(2)はSample3の時系列波形信号を示す図である。
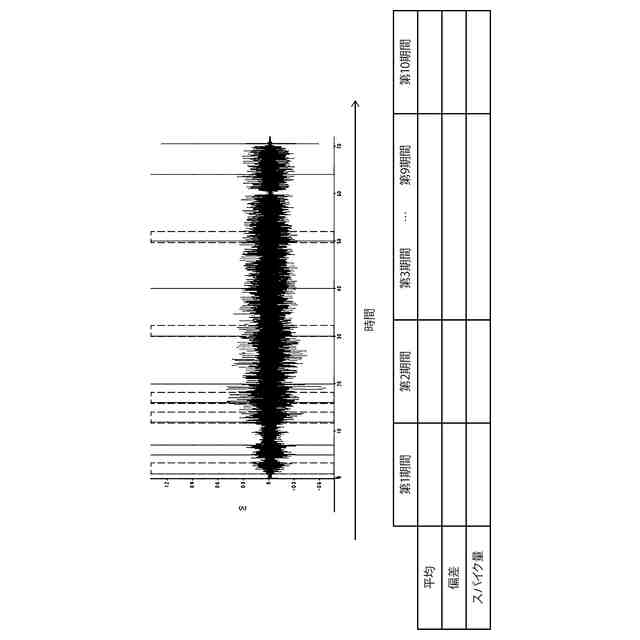
時系列波形信号から複数種類の特徴量を算出する概念図である。
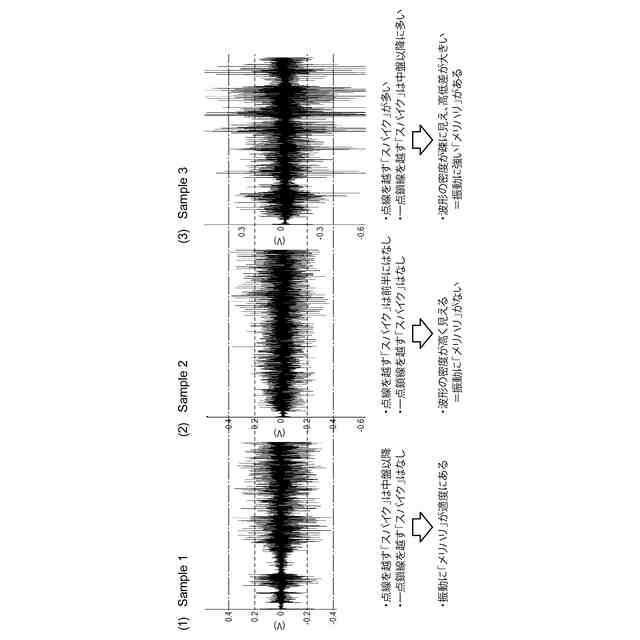
(1)はSample1のスパイク信号量を説明する図であり、(2)はSample2のスパイク信号量を説明する図であり、(3)はSample3のスパイク信号量を説明する図である。
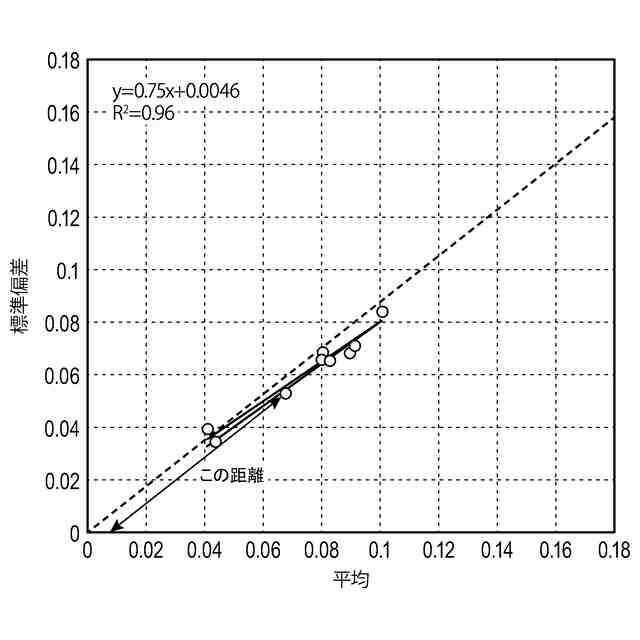
(1)はSample1の平均値とばらつきとの相関性を示す図であり、(2)はSample2の平均値とばらつきとの相関性を示す図であり、(3)はSample3の平均値とばらつきとの相関性を示す図であり、(4)はSample4の平均値とばらつきとの相関性を示す図である。
各プロットの原点からの距離を示す図である。
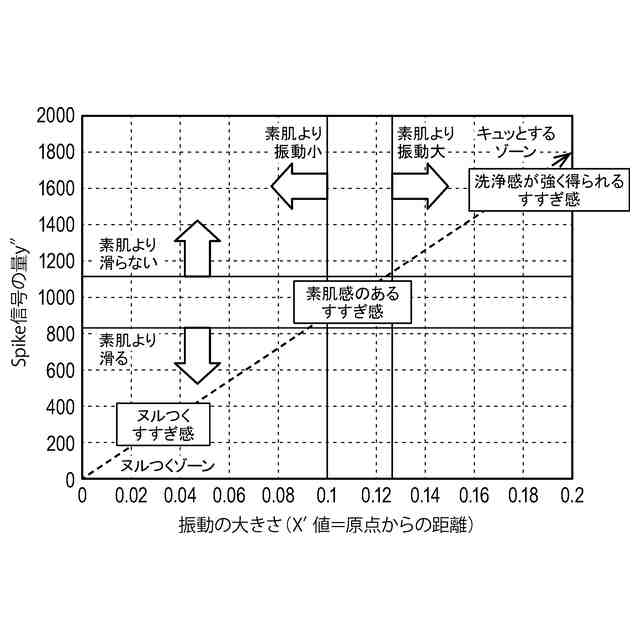
横軸をx´値、縦軸をy´´値とした座標系を示す図である。
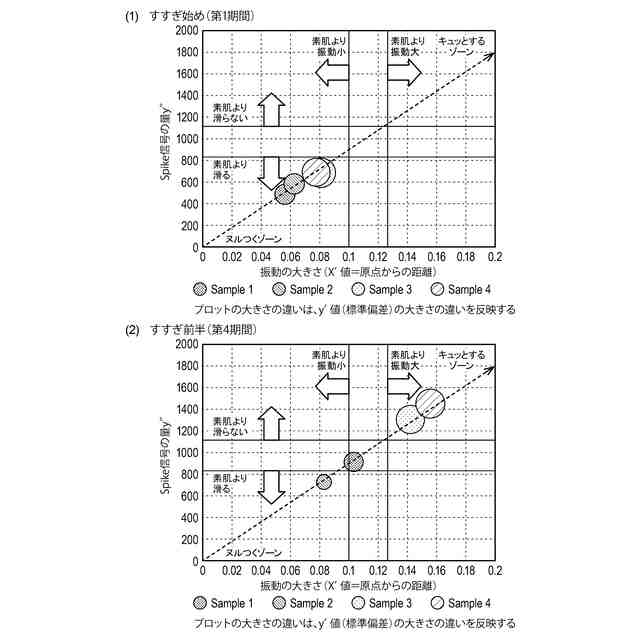
(1)は図7の座標系を用いたグラフ(すすぎ始め(第1期間))であり、(2)は図7の座標系を用いたグラフ(すすぎ前半(第4期間))である。
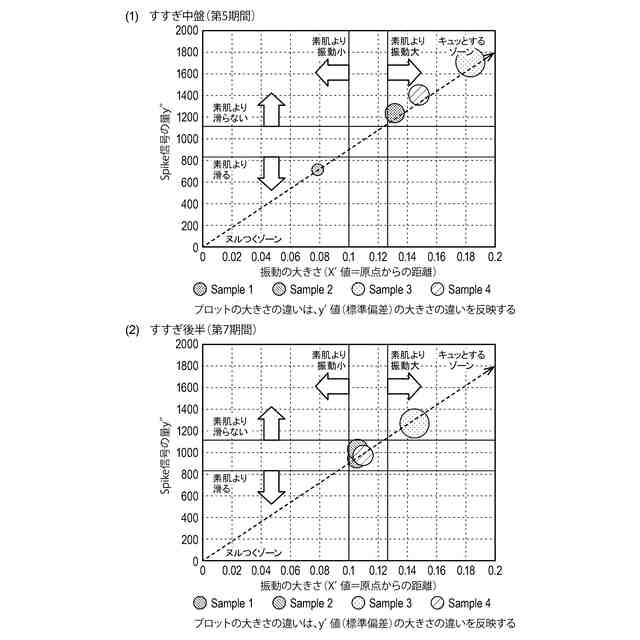
(1)は図7の座標系を用いたグラフ(すすぎ中盤(第5期間))であり、(2)は図7の座標系を用いたグラフ(すすぎ後半(第7期間))である。
図7の座標系を用いたグラフ(すすぎ終わり(第9期間))である。
(1)はSample1の図8から図10をまとめた図であり、(2)はSample2の図8から図10をまとめた図であり、(3)はSample3の図8から図10をまとめた図であり、(4)はSample4の図8から図10をまとめた図である。
(1)はx´値を代表にした時間変動グラフの概念図であり、(2)はx´値を代表にした時間変動グラフである。
回帰線に対するばらつきの乖離量について説明する図である。
(1)は横軸をx´値、縦軸をy値とした座標系を用いたグラフ(すすぎ始め(第1期間))、(2)は横軸をx´値、縦軸をy値とした座標系を用いたグラフ(すすぎ前半(第4期間))である。
(1)は横軸をx´値、縦軸をy値とした座標系を用いたグラフ(すすぎ中盤(第5期間))、(2)は横軸をx´値、縦軸をy値とした座標系を用いたグラフ(すすぎ後半(第7期間))である。
横軸をx´値、縦軸をy値とした座標系を用いたグラフ(すすぎ終わり(第9期間))である。
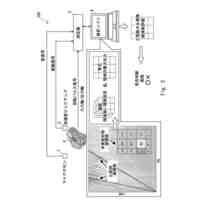
評価方法のフローチャートである。
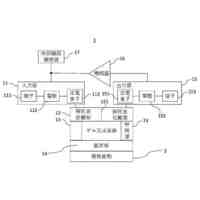
評価装置のブロック図である。
【発明を実施するための形態】
【0010】
以下、本発明の好ましい実施形態の例について、図面を参照して説明する。なお、本実施形態の図面は、いずれも本発明の技術思想、構成及び動作を説明するためのものであり、その構成を具体的に限定するものではない。また、すべての図面において、同様な構成要素には同様の符号を付し、重複する説明は適宜省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大真空
センサ
21日前
甲神電機株式会社
漏電検出器
26日前
甲神電機株式会社
電流センサ
26日前
甲神電機株式会社
電流検出器
26日前
ユニパルス株式会社
ロードセル
20日前
株式会社高橋型精
採尿具
27日前
東レ株式会社
液体展開用シート
13日前
株式会社トプコン
測量装置
26日前
株式会社トプコン
植物センサ
9日前
アズビル株式会社
熱式流量計
27日前
アズビル株式会社
湿度センサ
6日前
株式会社小野測器
回転計測装置
5日前
株式会社クボタ
作業車両
12日前
キヤノン電子株式会社
サーボ加速度計
13日前
株式会社東芝
センサ
5日前
キヤノン電子株式会社
サーボ加速度計
13日前
キヤノン電子株式会社
サーボ加速度計
13日前
株式会社ミツトヨ
変位測定装置
5日前
豊田合成株式会社
表示装置
26日前
日本特殊陶業株式会社
ガスセンサ
27日前
シャープ株式会社
収納装置
27日前
トヨタ自動車株式会社
異音解析方法
5日前
トヨタ自動車株式会社
画像検査装置
21日前
トヨタ自動車株式会社
NVH解析装置
5日前
株式会社東京久栄
水中移動体用採水器
27日前
TDK株式会社
温度センサ
27日前
横河電機株式会社
光源装置
27日前
株式会社大真空
センサ及びその製造方法
20日前
株式会社島津製作所
ガスクロマトグラフ
1か月前
キヤノン株式会社
撮像装置
5日前
ローム株式会社
MEMSデバイス
27日前
株式会社テクノメデイカ
採血分注システム
26日前
矢崎総業株式会社
サーミスタ
13日前
ローム株式会社
MEMS装置
1か月前
株式会社トーキン
電流センサ
12日前
三菱電機株式会社
振動センサ
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ