TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024154453
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023068259
出願日
2023-04-19
発明の名称
非接触給電システム
出願人
株式会社デンソー
代理人
弁理士法人明成国際特許事務所
主分類
H02J
50/10 20160101AFI20241024BHJP(電力の発電,変換,配電)
要約
【課題】複数のモータシステムにおける異常の有無を精度良く診断する。
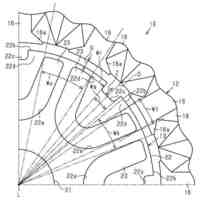
【解決手段】非接触給電システム1、1a~1iは、受電装置310を有し、第1作業場WA1および第2作業場WA2における作業対象物を、第1作業場から第2作業場まで搬送する移動体30、31a~31d、32a~32d、33~35と、第1作業場と第2作業場との間の移動体の移動経路内のうち、少なくとも移動体の停止が予定される停止予定位置Ar11、Ar13、Ar22~Ar25、Ar27、Ar32、Ar201、Ar41、Ar202、Ar51、Ar52、Ar61~Ar64、Ta1~Tg1、Ta2、Tc2、Te2、Tg2、Th3、Tj3、Tl3、Ar23aにおいて移動体が停止又は移動中の状態で、受電装置に対して非接触で給電可能な送電装置21~25と、を備える。受電装置は、少なくとも移動体の側面側に設けられた受電コイル311を有する。
【選択図】図1
特許請求の範囲
【請求項1】
非接触給電システム(1、1a~1i)であって、
受電装置(310)を有し、第1作業場(WA1)および第2作業場(WA2)における作業対象物を、前記第1作業場から前記第2作業場まで搬送する移動体(30、31a~31d、32a~32d、33~35)と、
前記第1作業場と前記第2作業場との間の前記移動体の移動経路内のうち、少なくとも前記移動体の停止が予定される停止予定位置(Ar11、Ar13、Ar22~Ar25、Ar27、Ar32、Ar201、Ar41、Ar202、Ar51、Ar52、Ar61~Ar64、Ta1~Tg1、Ta2、Tc2、Te2、Tg2、Th3、Tj3、Tl3、Ar23aにおいて前記移動体が停止した状態と、前記移動体が前記移動経路を移動中の状態とのうちの少なくとも一方の状態で、前記受電装置に対して非接触で給電可能な送電装置(21~25)と、
を備え、
前記受電装置は、少なくとも前記移動体の側面側に設けられた受電コイル(311)を有する、非接触給電システム。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の非接触給電システムにおいて、
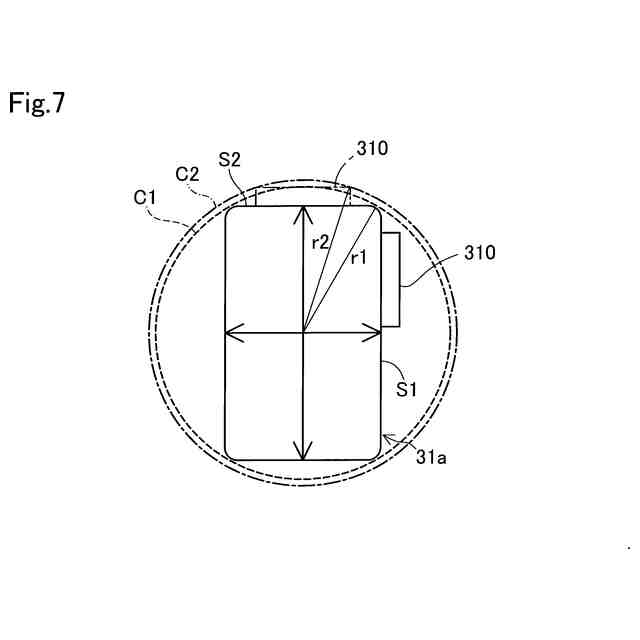
前記移動体の筐体は、鉛直方向に見て長手方向と短手方向とを有する輪郭形状を有し、
前記受電装置は、前記筐体の側面のうち、前記長手方向の側面に取り付けられている、非接触給電システム。
【請求項3】
請求項1に記載の非接触給電システムにおいて、
前記移動体において進行方向に対する姿勢が予め定められており、
前記受電コイルは、前記受電コイルの中心軸が前記進行方向と直交する方向となるように設けられている、非接触給電システム。
【請求項4】
請求項1に記載の非接触給電システムにおいて、
前記受電装置は、前記移動体の筐体の側面から外側に突出可能に配置され、
前記移動体は、前記受電装置に接続され、前記受電装置を前記移動体の前記筐体の側面から突出させ、また、突出した前記受電装置を前記移動体の前記筐体の側面に収めるように前記受電装置を移動させる受電側アーム部を、さらに有する、非接触給電システム。
【請求項5】
請求項1に記載の非接触給電システムにおいて、
前記送電装置は、前記移動経路内に設置されている固定物に配置されている、非接触給電システム。
【請求項6】
請求項5に記載の非接触給電システムにおいて、
前記固定物は、前記作業対象物を収納する1以上の収納棚を含む、非接触給電システム。
【請求項7】
請求項6に記載の非接触給電システムにおいて、
前記送電装置は、少なくとも送電コイルを含む送電部を有し、
前記固定物は、1台の前記移動体が通過可能であり、且つ、複数台の前記移動体のすれ違いが不可能な程度の幅の通路を形成するように間隔を空けて配置された複数の前記収納棚を含み、
前記送電装置は、前記送電部が前記通路に面するように配置されている、非接触給電システム。
【請求項8】
請求項7に記載の非接触給電システムにおいて、
複数の前記送電装置を備え、
前記通路は、予め入口が設定されており、
前記複数の前記送電装置は、各前記送電部が前記通路のうちの前記入口に近い側に位置するように設置されている、非接触給電システム。
【請求項9】
請求項6に記載の非接触給電システムにおいて、
前記移動体は、前記収納棚に収納された前記作業対象物をピックアップ可能に構成され、
前記送電装置は、前記収納棚において前記作業対象物をピックアップ可能最低地上高さよりも低い部分に設置されている、非接触給電システム。
【請求項10】
請求項9に記載の非接触給電システムにおいて、
前記送電装置は、前記収納棚の最下部において、前記移動体が前記作業対象物をピックアップする側の前記収納棚の端部から500mm(ミリメートル)以内に少なくとも一部が位置するように設置されている、非接触給電システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、非接触給電システムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来から工場や倉庫などにおいて、無人搬送車(AGV:Automated Guided Vehicle)や自律走行フォークリフト等の移動体を用いて、製品や部品等の作業対象物を搬送する搬送システムが提案されている。特許文献1のシステムでは、自律走行フォークリフトおよび自律走行AGV等の移動体を用いてトラックで搬送されてくる荷物をトラックバースから生産現場まで搬送する。また、特許文献1では、移動体に対して非接触給電(ワイヤレス給電)で充電を行うことが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-62964号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、工場や倉庫における作業対象物の搬送の効率化について言及されているものの、非接触給電(ワイヤレス給電)に関しては、単に「ワイヤレス給電は電池の人手による充電操作を不要にできる」旨が記載されているに過ぎない。しかし、非接触給電を行うためには、移動体は、送電装置の近傍を走行する又は送電装置の近傍で停止する必要があり、このような移動体の動作は、搬送の効率化に対して影響を与える。このため、非接触給電のための移動体の動作を考慮した作業対象物の搬送の効率化を実現可能な技術が望まれる。
【課題を解決するための手段】
【0005】
本開示の一実施形態として、非接触給電システム(1、1a~1i)が提供される。この非接触給電システムは、受電装置(310)を有し、第1作業場(WA1)および第2作業場(WA2)における作業対象物を、前記第1作業場から前記第2作業場まで搬送する移動体(30、31a~31d、32a~32d、33~35)と、前記第1作業場と前記第2作業場との間の前記移動体の移動経路内のうち、少なくとも前記移動体の停止が予定される停止予定位置(Ar11、Ar13、Ar22~Ar25、Ar27、Ar32、Ar201、Ar41、Ar202、Ar51、Ar52、Ar61~Ar64、Ta1~Tg1、Ta2、Tc2、Te2、Tg2、Th3、Tj3、Tl3、Ar23aにおいて前記移動体が停止した状態と、前記移動体が前記移動経路を移動中の状態とのうちの少なくとも一方の状態で、前記受電装置に対して非接触で給電可能な送電装置(21~25)と、を備え、前記受電装置は、少なくとも前記移動体の側面側に設けられた受電コイル(311)を有する。
【0006】
上記形態の非接触システムによれば、第1作業場から第2作業場までの移動体の移動経路内のうち、少なくとも移動体の停止が予定される停止予定位置において移動体が停止した状態と、移動体が移動経路を移動中の状態とのうちの少なくとも一方の状態で、受電装置に対して非接触で給電可能な送電装置を備えるため、非接触給電のために移動経路から外れた位置に設けられた送電装置まで走行することを要しない。このため、作業対象物の搬送の効率化を実現できる。また、移動経路とは別に送電装置まで移動体を走行させるためのスペースを要しないので、作業領域の省スペース化を図ることができる。また、受電装置は、少なくとも移動体の側面側に設けられた受電コイルを有するので、送電装置を地中や床下に配置することを要しない。このため、システムを構築し易い。
【0007】
本開示は、種々の形態で実現することも可能である。例えば、車両位置推定方法、車両位置推定装置や車両位置推定方法を実現するためのコンピュータプログラム、かかるコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0008】
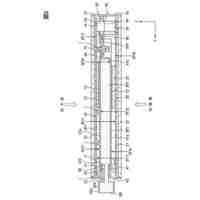
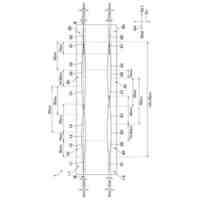
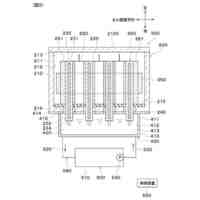
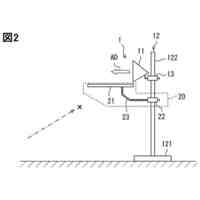
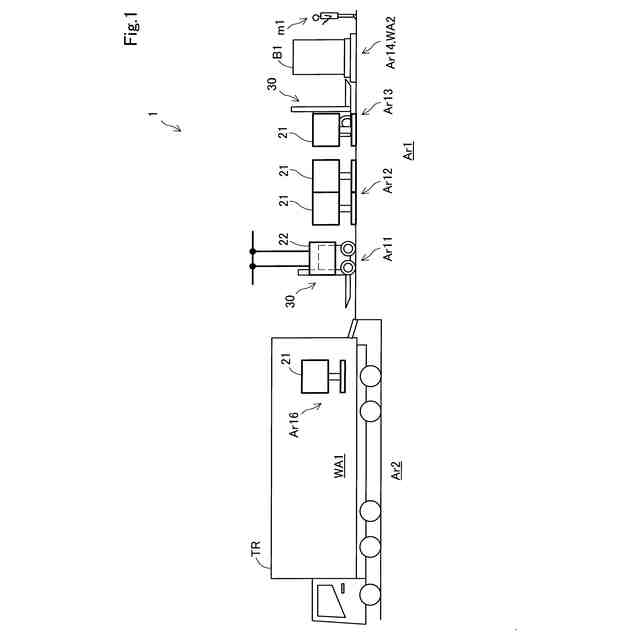
本開示の一実施形態としての非接触給電システムを適用した搬送システムの概略構成を示す側面図である。
第1実施形態の搬送システムの概略構成を示す上面図である。
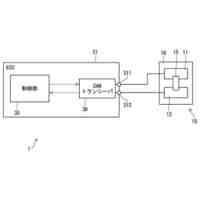
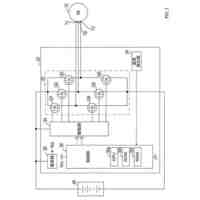
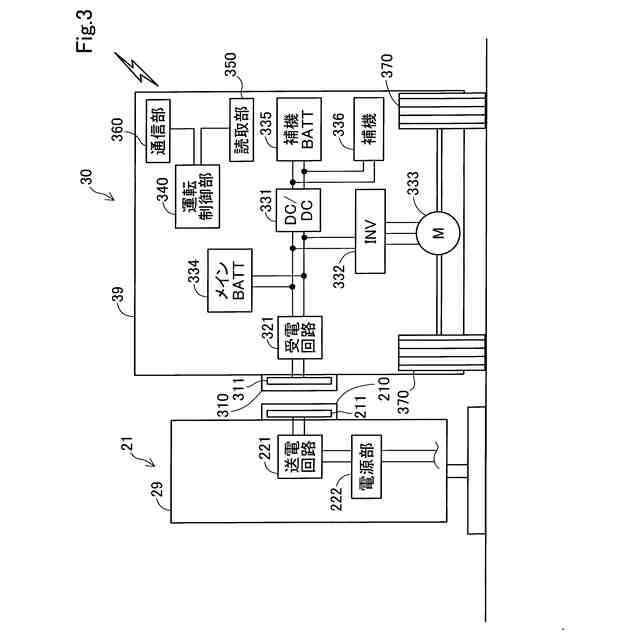
移動体および第1送電装置の構成を模式的に示すブロック図である。
第2実施形態の非接触給電システムを適用した搬送システムの概略構成を示す側面図である。
第2実施形態の搬送システムの概略構成を示す上面図である。
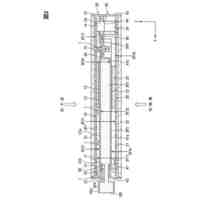
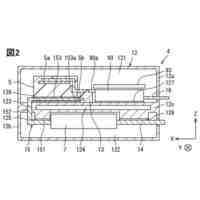
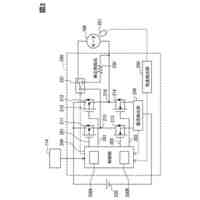
第2実施形態の移動体の構成を示すブロック図である。
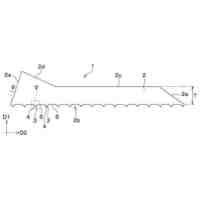
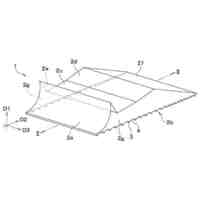
第2実施形態の移動体の外観形状を模式的に示す上面図である。
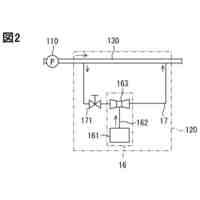
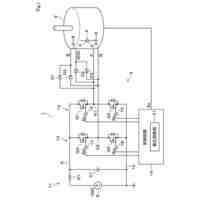
第2実施形態の送電装置の構成を示すブロック図である。
第3実施形態の非接触給電システムを適用した搬送システムの概略構成を示す側面図である。
第3実施形態の搬送システムの概略構成を示す上面図である。
第4実施形態の非接触給電システムを適用した搬送システムの概略構成を示す側面図である。
第4実施形態の搬送システムの概略構成を示す上面図である。
第5実施形態の非接触給電システムを適用した搬送システムの概略構成を示す側面図である。
第5実施形態の搬送システムの概略構成を示す上面図である。
第6実施形態の非接触給電システムを適用した搬送システムの概略構成を示す側面図である。
第7実施形態の非接触給電システムを適用した搬送システムの概略構成を示す側面図である。
第8実施形態の非接触給電システムを適用した搬送システムの概略構成を示す上面図である。
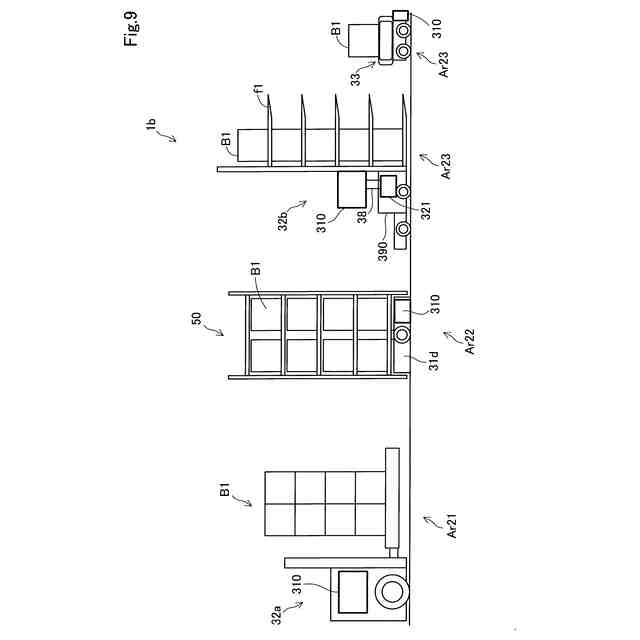
第9実施形態の非接触給電システムを適用した搬送システムの概略構成を示す上面図である。
第10実施形態の非接触給電システムを適用した搬送システムの概略構成を示す上面図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A1.装置構成:
図1および図2に示す非接触給電システム1は、作業対象物B1を、トラックバースAr2に停車中のトラックTRから搬出し、屋内領域Ar1の予め定められた検品位置Ar14まで搬送するための搬送システムに適用されている。検品位置Ar14に置かれた作業対象物B1は、作業員m1により検品される。トラックTR内は本開示における「第1作業場WA1」に相当する。また、検品位置Ar14は、本開示における「第2作業場WA2」に相当する。
【0010】
非接触給電システム1は、3台の移動体30と、3つの第1送電装置21と、1つの第2送電装置22と、1つの第3送電装置23とを備える。なお、図1では、1台の移動体30と、1つの第3送電装置23とは、図示の便宜上省略されている。移動体30は、作業対象物B1を搬送可能なフォークリフト型の無人搬送車(AGV:Automated Guided Vehicle)として構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
5日前
株式会社デンソー
光学部材
19日前
株式会社デンソー
測距装置
12日前
株式会社デンソー
光学部材
12日前
株式会社デンソー
電子装置
1日前
株式会社デンソー
電子装置
1日前
株式会社デンソー
駆動装置
19日前
株式会社デンソー
駆動装置
19日前
株式会社デンソー
測距装置
19日前
株式会社デンソー
検出装置
25日前
株式会社デンソー
レーダ装置
12日前
株式会社デンソー
位相調整器
4日前
株式会社デンソー
半導体装置
12日前
株式会社デンソー
輻射ヒータ
18日前
株式会社デンソー
信号処理装置
19日前
株式会社デンソー
動力伝達装置
5日前
株式会社デンソー
物体検知装置
20日前
株式会社デンソー
走路認識装置
12日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
潅水システム
25日前
株式会社デンソー
負荷駆動装置
4日前
株式会社デンソー
電圧検出回路
4日前
株式会社デンソー
電圧検出回路
4日前
株式会社デンソー
ガス燃料噴射弁
4日前
株式会社デンソー
動揺病抑制装置
5日前
株式会社デンソー
電池モジュール
19日前
株式会社デンソー
モータ駆動装置
19日前
株式会社デンソー
レーダ検査装置
4日前
株式会社デンソートリム
モータ制御装置
13日前
株式会社デンソーウェーブ
流通管理システム
19日前
株式会社デンソーテン
ディスプレイ装置
5日前
株式会社デンソー
冷凍サイクル装置
12日前
株式会社デンソー
静電モータ駆動回路
4日前
株式会社デンソー
巻線界磁型回転電機
19日前
株式会社デンソー
巻線界磁型回転電機
19日前
株式会社デンソー
カード挿入システム
12日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ