TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014793
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117630
出願日
2023-07-19
発明の名称
信号処理装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01S
13/56 20060101AFI20250123BHJP(測定;試験)
要約
【課題】マイクロドップラーの判定精度を向上させることができる信号処理装置を提供する。
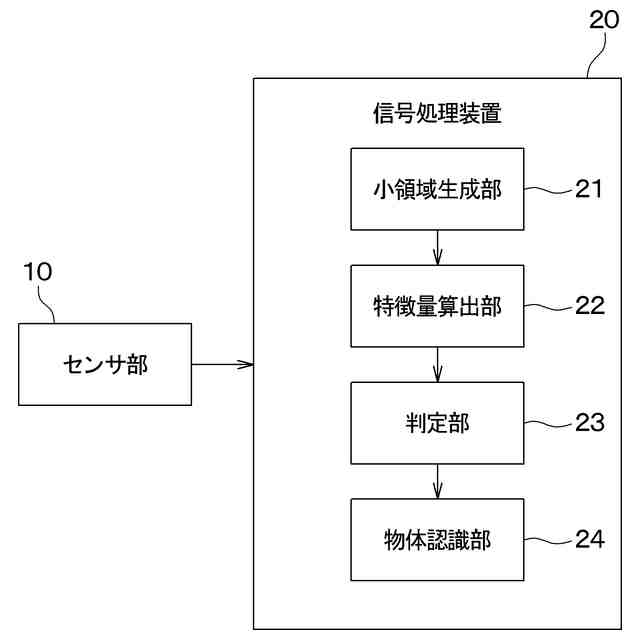
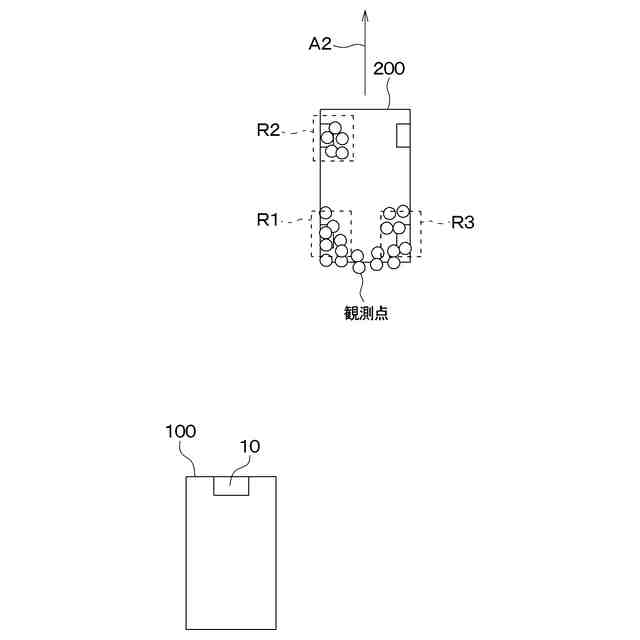
【解決手段】信号処理装置は、電磁波の送受信によって取得した観測点の方位に対して、電磁波を送受信するセンサ部10に対する観測点の相対速度が単調増加または単調減少することに関する特徴量を算出する特徴量算出部22と、特徴量に基づいて、観測点においてマイクロドップラーが発生しているか否かを判定する判定部23と、を備える。マイクロドップラーが発生していると、観測点の方位に対して相対速度が単調増加または単調減少する傾向があるため、この傾向を利用することにより、マイクロドップラーの判定精度を向上させることができる。
【選択図】図1
特許請求の範囲
【請求項1】
信号処理装置であって、
電磁波の送受信によって取得した観測点の方位に対して、前記電磁波を送受信するセンサ部(10)に対する観測点の相対速度が単調増加または単調減少することに関する特徴量を算出する特徴量算出部(22)と、
前記特徴量に基づいて、前記観測点においてマイクロドップラーが発生しているか否かを判定する判定部(23)と、を備える信号処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記特徴量算出部は、
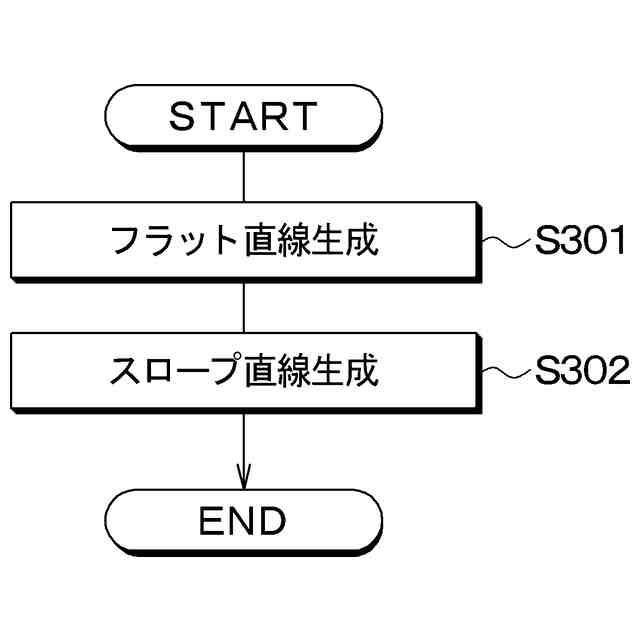
前記観測点の方位と、前記センサ部に対する相対速度とを、
該方位に対して該相対速度が単調増加または単調減少するスロープ直線と、
該相対速度が一定のフラット直線と、に回帰し、
該回帰の結果を前記特徴量として出力する請求項1に記載の信号処理装置。
【請求項3】
前記特徴量算出部は、
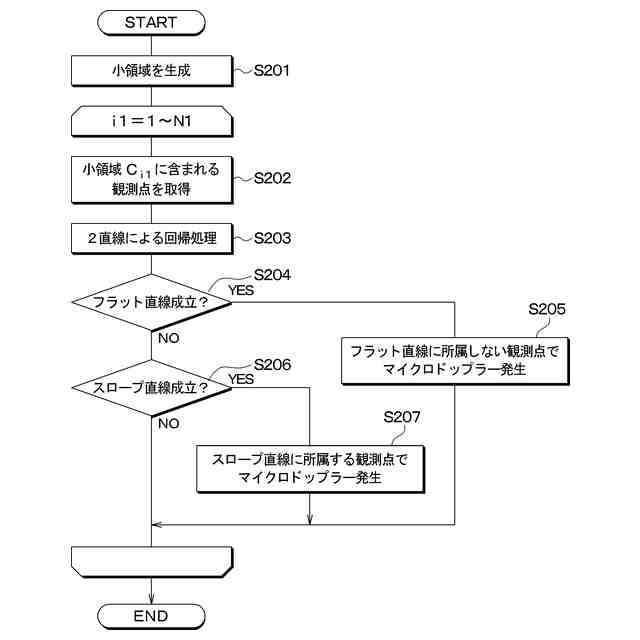
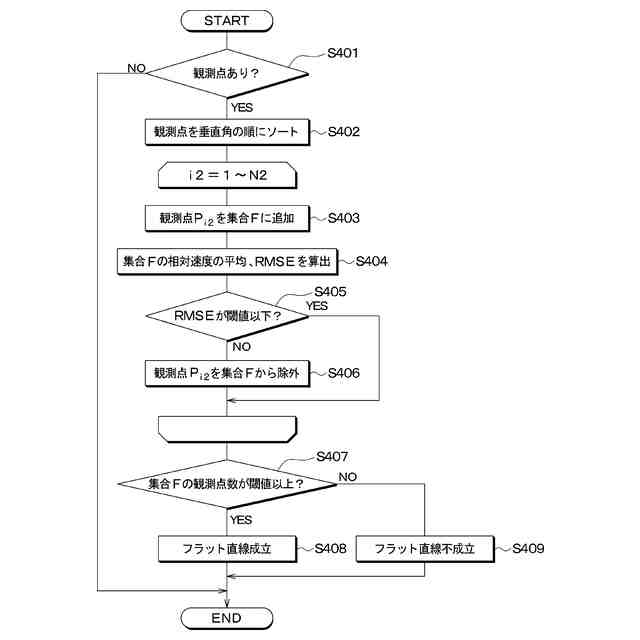
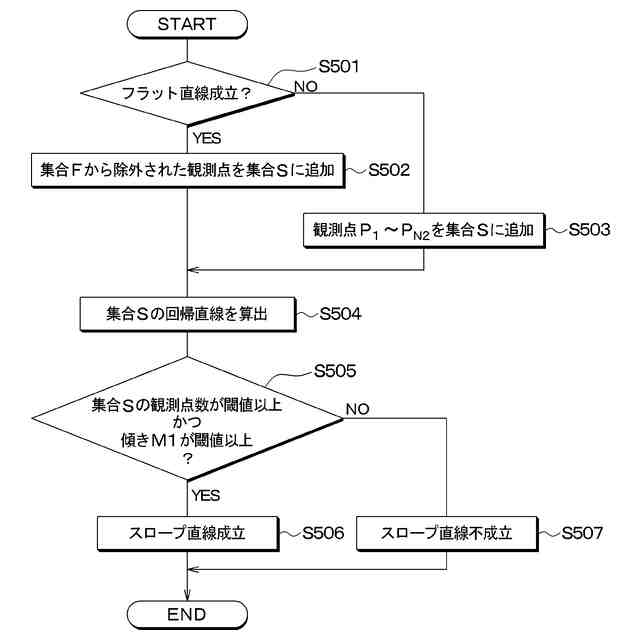
前記スロープ直線が成立したか否かを、前記スロープ直線に所属する前記観測点の数、および、前記スロープ直線の傾きに基づいて判定し、
前記フラット直線が成立したか否かを、前記フラット直線に所属する前記観測点の数に基づいて判定し、
前記スロープ直線および前記フラット直線が成立したか否かの判定結果を前記特徴量に含めて出力する請求項2に記載の信号処理装置。
【請求項4】
前記判定部は、
前記特徴量算出部によって前記フラット直線が成立したと判定された場合には、前記フラット直線から除外された前記観測点においてマイクロドップラーが発生していると判定し、
前記特徴量算出部によって前記スロープ直線が成立したと判定された場合には、前記スロープ直線に所属する前記観測点においてマイクロドップラーが発生していると判定する請求項3に記載の信号処理装置。
【請求項5】
前記判定部は、
前記特徴量算出部によって前記フラット直線が成立したと判定された場合には、
前記フラット直線に所属する前記観測点の相対速度をVとして、
前記フラット直線から除外された前記観測点について、相対速度を前記相対速度Vで置き換え、マイクロドップラーが発生していないと判定する請求項3に記載の信号処理装置。
【請求項6】
前記特徴量算出部は、
前記観測点を方位の大きい順に前記フラット直線に回帰し、
前記フラット直線との誤差量が閾値よりも大きい前記観測点を前記スロープ直線に回帰する請求項2に記載の信号処理装置。
【請求項7】
前記センサ部は車両に搭載され、
前記センサ部が搭載された車両を自車両とし、
前記自車両とは異なる車両を他車両として、
前記センサ部は前記他車両の前記観測点の情報を取得し、
前記特徴量算出部は、前記自車両の対地速度、前記他車両のタイヤ径、前記センサ部の搭載位置に基づいて前記スロープ直線の傾きを算出し、該算出した傾きで前記スロープ直線を生成する請求項2に記載の信号処理装置。
【請求項8】
前記観測点の情報に基づいて物体を認識する物体認識部(24)を備え、
前記物体認識部は、前記判定部によってマイクロドップラーが発生していると判定された前記観測点を除外して生成された動的占有格子地図を用いて物体を認識する請求項1に記載の信号処理装置。
【請求項9】
前記観測点の情報に基づいて物体を認識する物体認識部(24)を備え、
前記物体認識部は、前記判定部によってマイクロドップラーが発生していると判定された前記観測点を除外してクラスタリングを行う請求項1に記載の信号処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、信号処理装置に関するものである。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
FMCW(Frequency Modulated Continuous Wave)方式のミリ波レーダやLiDAR(Light Detection and Ranging)等を用いた物体検知装置では、装置周辺に存在する物体までの距離を計測するとともに、ドップラー効果を用いて物体の相対速度を計測する。このような物体検知装置を車載し走行環境の認識に活用する場合には、距離、相対速度等の観測情報は、周辺車両等の移動体やガードレール等の静止物の位置や移動速度等の状態量を認識するために有用な情報である。
【0003】
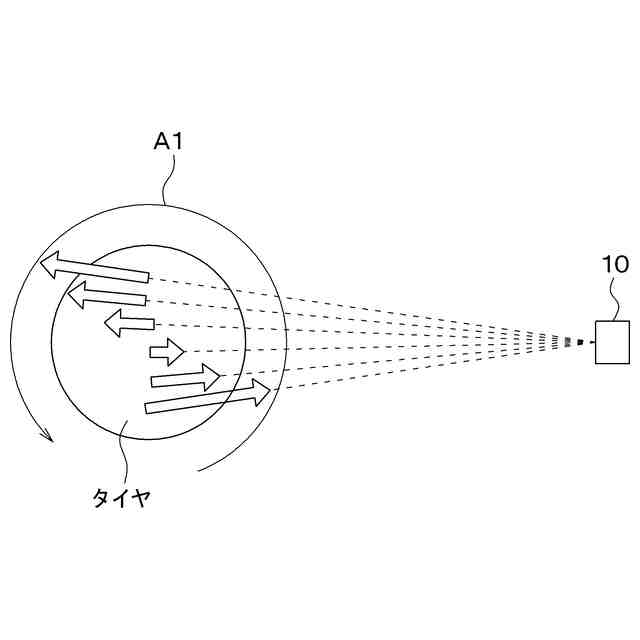
しかしながら、周辺車両が移動している場合には、回転するタイヤにおいて、タイヤ周辺のボデーとは異なる相対速度が計測される。この現象はマイクロドップラーと呼ばれ、車両の速度等の状態量の認識において認識精度低下の原因となる。
【0004】
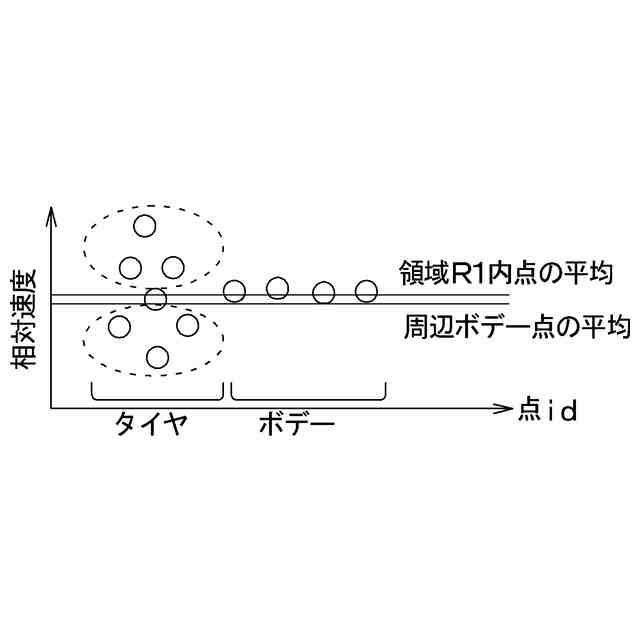
特許文献1に記載の信号処理装置では、観測点の相対速度の平均値、標準偏差等の統計量や、周辺の観測点との相対速度の差分を用いて、マイクロドップラーが発生しているか否かの判定を行っている。
【0005】
具体的には、観測点に対してタイヤのホイール程度の大きさを限度としてクラスタリングを行う。そして、クラスタリングにより得られた小クラスタ内の観測点について相対速度の平均値と標準偏差を算出し、算出結果と小クラスタ近傍の観測点の相対速度とに基づいて、小クラスタ内の各観測点についてマイクロドップラー判定を行う。
【0006】
つぎに、車幅程度の大きさを限度としてクラスタリングを行う。そして、得られた中クラスタ内の観測点のうち、小クラスタ判定でマイクロドップラーが発生していないと判定された観測点であって、相対速度が平均から外れた観測点について、マイクロドップラーが発生していると判定する。
【0007】
さらに、車両の長さ程度の大きさを限度としてクラスタリングを行い、得られた大クラスタ内の観測点から、小クラスタ、中クラスタでの判定でマイクロドップラーが発生していると判定された観測点を除外する。そして、残った観測点の速度を用いて大クラスタの速度代表値を算出する。
【先行技術文献】
【特許文献】
【0008】
特開2021-124422号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1では、タイヤから密に観測点が得られ、周辺ボデーからも観測点が得られる という状況を前提としているため、その前提から外れるシーンではマイクロドップラーの判定精度が低下するおそれがある。
【0010】
本開示は上記点に鑑みて、マイクロドップラーの判定精度を向上させることができる信号処理装置を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ