TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018086
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023121503
出願日
2023-07-26
発明の名称
走路認識装置
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/16 20060101AFI20250130BHJP(信号)
要約
【課題】比較的遠方の走行経路まで、精度良く認識することが可能な走路認識装置を提供する。
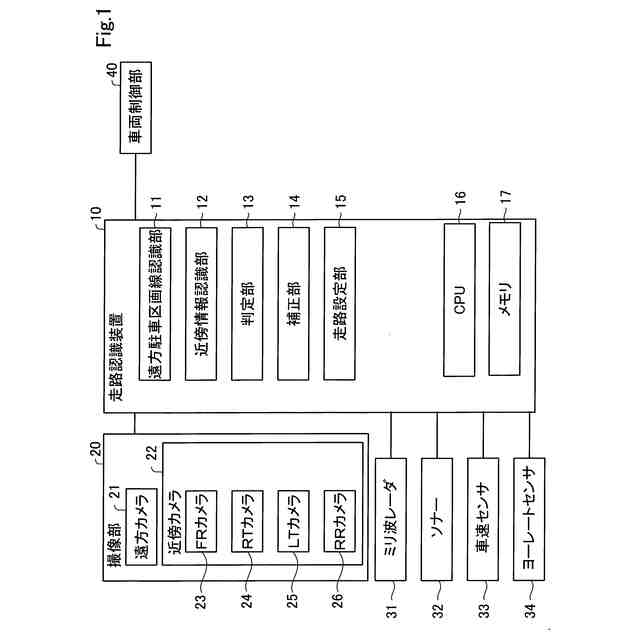
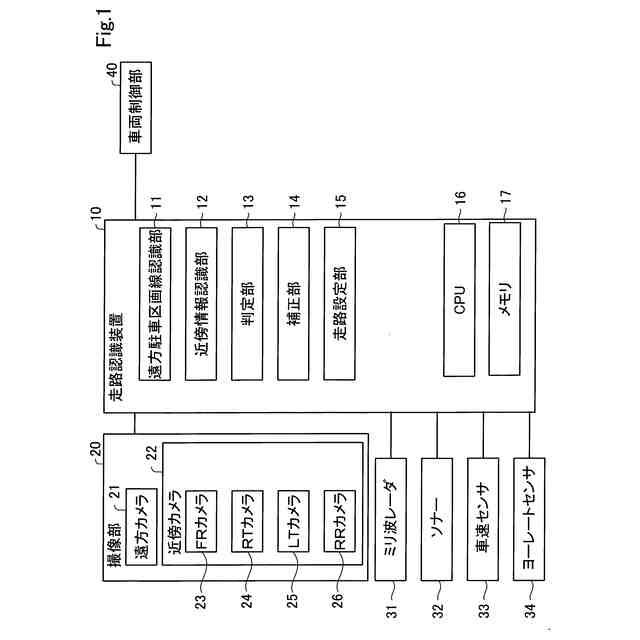
【解決手段】走路認識装置10は、車両に搭載された遠方撮像装置21により取得された車両の進行方向の遠方の撮像画像を用いて、進行方向の遠方に存在する駐車区画線PL2を認識する遠方駐車区画線認識部11と、車両に搭載された近傍撮像装置22により取得された車両の近傍の撮像画像と、車両に搭載されたセンサ32により取得された車両の近傍のセンサ情報と、のうちの少なくとも一方を用いて、車両の近傍に存在する直線状の構造物を認識する近傍情報認識部12と、遠方駐車区画線認識部により認識された駐車区画線の認識結果を、近傍情報認識部により認識された直線状の構造物の認識結果を用いて補正する補正部14と、補正部により補正された後の駐車区画線の情報を用いて、走路を設定する走路設定部15と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
車両(1)に搭載され、前記車両の走路を認識する走路認識装置であって、
前記車両に搭載された遠方撮像装置(21)により取得された前記車両の進行方向の遠方の撮像画像を用いて、前記進行方向の遠方に存在する駐車区画線(PL2)を認識する遠方駐車区画線認識部(11)と、
前記車両に搭載された近傍撮像装置(22)により取得された前記車両の近傍の撮像画像と、前記車両に搭載されたセンサ(32)により取得された前記車両の近傍のセンサ情報と、のうちの少なくとも一方を用いて、前記車両の近傍に存在する直線状の構造物を認識する近傍情報認識部(12)と、
前記遠方駐車区画線認識部により認識された前記駐車区画線の認識結果を、前記近傍情報認識部により認識された前記直線状の構造物の認識結果を用いて補正する補正部(14)と、
前記補正部により補正された後の前記駐車区画線の情報を用いて、前記走路を設定する走路設定部(15)と、
を備える、走路認識装置。
続きを表示(約 710 文字)
【請求項2】
前記遠方駐車区画線認識部により認識された前記駐車区画線と、前記近傍情報認識部により認識された前記直線状の構造物との同一性を判定する判定部(13)、
をさらに備え、
前記補正部は、
前記判定部において同一である旨の判定がなされた場合に、前記遠方駐車区画線認識部により認識された前記駐車区画線の位置および角度を、前記直線状の構造物の位置および角度に対応するように補正する、請求項1に記載の走路認識装置。
【請求項3】
前記直線状の構造物は、前記近傍撮像装置により取得された撮像画像を用いて認識された駐車区画線である、請求項1に記載の走路認識装置。
【請求項4】
前記直線状の構造物は、前記近傍撮像装置または前記センサにより取得された情報を用いて認識された静止立体物である、請求項1に記載の走路認識装置。
【請求項5】
前記静止立体物は、少なくとも前記近傍撮像装置により取得された撮像画像を用いて認識され、移動可能な可動物体を含まない、請求項4に記載の走路認識装置。
【請求項6】
前記近傍撮像装置は、前記車両の側方へ向くように前記車両の側方部に設けられ、
前記近傍撮像装置により取得された前記車両の近傍の前記撮像画像は、前記車両の少なくとも側方且つ近傍の画像である、請求項1に記載の走路認識装置。
【請求項7】
前記車両が駐車するべき駐車エリアが前記駐車区画線によって規定されている駐車場内での前記車両の走行支援に用いられる、請求項1~請求項6のうちいずれか一項に記載の走路認識装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、走路認識装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
例えば、特許文献1には、駐車場内で車両をより安全に走行させるように車両の走行を支援する走行支援装置が記載されている。この走行支援装置では、車両の周囲の撮像結果を用いて、駐車区画線の端部を検出し、検出した複数の端部を結んだ近似線を、仮想的な走行区画線に設定し、設定された走行区画線に基づいて、走行区画線から一定の距離を維持するように車両の走行を支援するようにしている。
【先行技術文献】
【特許文献】
【0003】
特開2019-66934号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のように、駐車場内で車両が走行すべき走行経路を認識するためには、駐車区画線の情報を用いることが有効である。ただし、一般に、車両の周囲を撮影する近傍カメラは駐車区画線を精度高く認識できるが認識範囲が狭いという欠点がある。近傍カメラでは駐車区画線を認識できる範囲が自車周辺の近傍に限定されるため、駐車区画線が継続している比較的遠方の範囲の情報を得ることが困難である。なお、数十m先まで撮影可能な遠方カメラを用いることにより、駐車区画線を遠方まで認識することは可能ではあるが、位置精度が低いため、精度良く遠方の駐車区画線を認識することが困難である。上記問題に鑑み、比較的遠方の走行経路まで、精度良く認識することが可能な走路認識装置が望まれる。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、走路認識装置が提供される。この走路認識装置は、車両(1)に搭載され、前記車両の走路を認識する走路認識装置であって、前記車両に搭載された遠方撮像装置(21)により取得された前記車両の進行方向の遠方の撮像画像を用いて、前記進行方向の遠方に存在する駐車区画線(PL2)を認識する遠方駐車区画線認識部(11)と、前記車両に搭載された近傍撮像装置(22)により取得された前記車両の近傍の撮像画像と、前記車両に搭載されたセンサ(32)により取得された前記車両の近傍のセンサ情報と、のうちの少なくとも一方を用いて、前記車両の近傍に存在する直線状の構造物を認識する近傍情報認識部(12)と、前記遠方駐車区画線認識部により認識された前記駐車区画線の認識結果を、前記近傍情報認識部により認識された前記直線状の構造物の認識結果を用いて補正する補正部(14)と、前記補正部により補正された後の前記駐車区画線の情報を用いて、前記走路を設定する走路設定部(15)と、を備える。
この構成によれば、遠方駐車区画線認識部により認識された遠方駐車区画線が、近傍情報認識部により認識された前記直線状の構造物の認識結果を用いて、補正部により補正される。そして、走路設定部により、補正後の駐車区画線を用いて車両の走路が設定される。すなわち、遠方撮像装置により取得された撮像画像を用いて認識された遠方の駐車区画線を、比較的認識精度の高い近傍の情報である認識結果を用いて補正した上で、走路設定が行われる。したがって、遠方撮像装置により撮像可能な比較的遠方までの走行経路を、精度良く認識することができる。
【図面の簡単な説明】
【0007】
本開示の第1実施形態における走路認識装置の概略構成を示す機能ブロック図である。
第1実施形態において、遠方の区画線を近傍の区画線に基づき補正する様子を模式的に示す説明図である。
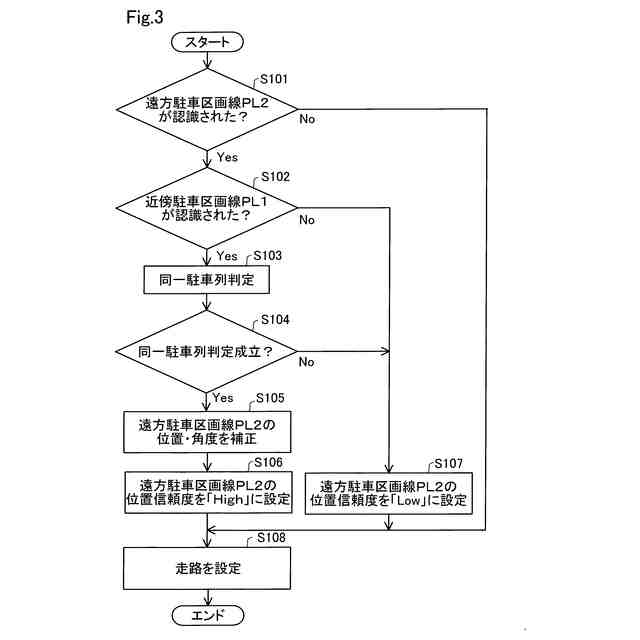
第1実施形態における走路認識処理の手順を示すフローチャートである。
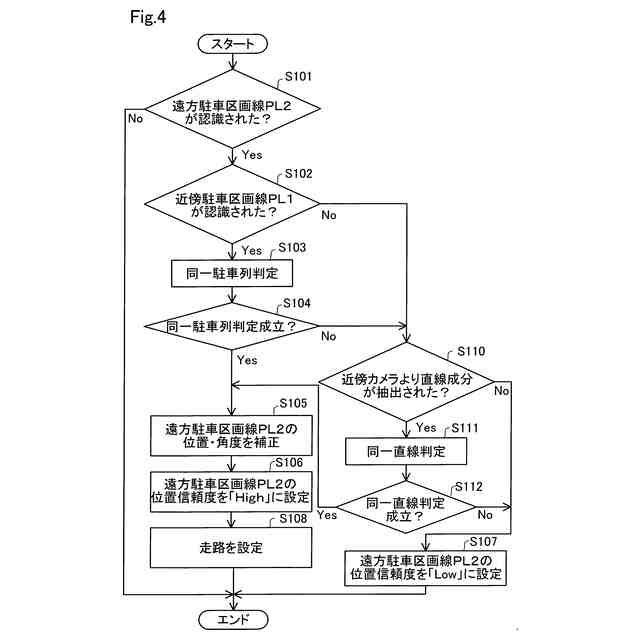
本開示の第2実施形態における走路認識処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、複数の実施形態について図面に基づいて説明する。
A.第1実施形態:
A1.走路認識装置10の構成:
第1実施形態の構成について、図1~図3を参照しつつ説明する。第1実施形態の走路認識装置10は、車両1(図2参照)に搭載され、かかる車両1の走路を認識する。なお、本実施形態において、走路認識装置10が搭載された車両1を、「自車両1」とも呼ぶ。自車両1は、自動運転可能な車両1である。自車両1は、自動運転と手動運転(運転者による運転)とを切り替えて実行する車両1と、これらの2種類の運転のうちの自動運転のみを実行する車両1とのいずれであってもよい。図1に示すように、走路認識装置10は、CPU16およびメモリ17を備えたECU(Electronic Control Unit)として構成されている。走路認識装置10は、車両1に搭載された撮像部20、ミリ波レーダ31、ソナー32、車速センサ33、ヨーレートセンサ34、および車両制御部40に、それぞれ電気的に接続されている。
【0009】
以下の説明に際して、左右方向を言うときには、車両1の進行方向に見たときの左右を基準とする。撮像部20は、遠方カメラ21と、近傍カメラ22とを備えている。遠方カメラ21は、1つのカメラにより構成されており、自車両1の前方を撮像して撮像画像を得る。図2に示すように、遠方カメラ21は、例えば、車両1のフロントウィンドウの上方に配置される。遠方カメラ21は、例えば、視野角60°~100°程度、数10m~100m程度前方までを撮像可能である。遠方カメラ21は、「遠方撮像装置」の一例に相当する。
【0010】
近傍カメラ22は、フロントカメラ(FRカメラ)23と、ライトカメラ(RTカメラ)24と、レフトカメラ(LTカメラ)25と、リアカメラ(RRカメラ)26と、を有して構成されている。フロントカメラ23は、例えば、車両1のグリルやバンパー付近に設けられる。ライトカメラ24は、例えば、車両1の右側のバックミラー(側方部)に、右側方へ向くように設けられる。レフトカメラ25は、例えば、車両1の左側のバックミラー(側方部)に、左側方へ向くように設けられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ