TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024151751
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023065395
出願日
2023-04-13
発明の名称
位置推定装置及び交通管制システム
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/01 20060101AFI20241018BHJP(信号)
要約
【課題】車両に衛星測位センサを搭載していなくとも、所望の車両の動作制御を行うための自車両の現在位置、姿勢に関する情報を高精度で推定する。
【解決手段】位置推定装置は、移動体の位置、角度及び速度を少なくとも含む第1の移動体情報と移動体周辺の道路情報を含む環境情報とを、受信する情報受信部、第1の移動体情報及び環境情報を統合化して、統合環境情報を作成する認識部、移動体の位置情報を含む統合環境情報を移動体に送信する情報送信部、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
移動体の位置、角度及び速度を少なくとも含む第1の移動体情報と前記移動体周辺の少なくとも白線を含む道路情報を含む環境情報とを、複数の環境情報取得装置から受信する情報受信部、
受信した前記環境情報を統合化して、前記移動体の位置情報を含む統合環境情報を作成する認識部、
前記情報受信部で受信した前記第1の移動体情報及び前記環境情報と、前記認識部で作成された前記統合環境情報とを記録する情報記録部、及び
前記認識部で作成された前記統合環境情報を前記移動体に送信する情報送信部を備えた位置推定装置。
続きを表示(約 1,600 文字)
【請求項2】
前記情報受信部は、
前記移動体から少なくとも目標経路、目標車速、位置、姿勢を含む第2の移動体情報を受信し、
前記認識部は、
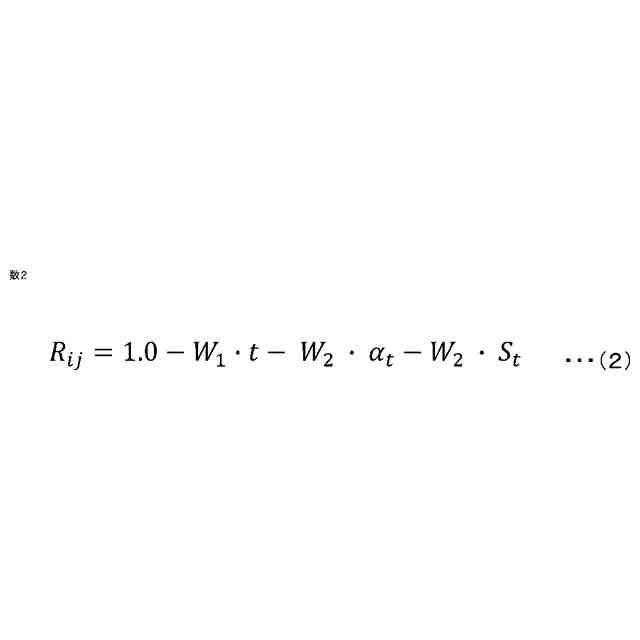
前記環境情報を取得した前記環境情報取得装置毎の信頼度及び第2の移動体情報の信頼度を算出する信頼度算出部と、算出された前記信頼度を比較する信頼度比較部と、をさらに備え、
前記信頼度比較部は、最も高い信頼度を有する前記環境情報取得装置からの前記統合環境情報または前記第2の移動体情報を選択し、
前記情報送信部は、前記信頼度比較部で選択された情報を前記位置情報として前記移動体に送信する、請求項1に記載の位置推定装置。
【請求項3】
前記認識部の前記信頼度比較部は、
最も高い前記信頼度が予め設定された第1の基準値より小さい場合に、前記移動体の少なくとも前記位置情報を含む補正情報を作成し、選択された最も高い信頼度を有する前記環境情報取得装置からの前記統合環境情報または前記第2の移動体情報とともに出力する、請求項2に記載の位置推定装置。
【請求項4】
前記認識部は、
前記移動体の将来の位置を予測する車両位置予測部をさらに備え、
前記信頼度比較部において、最も高い前記信頼度が予め設定された第1の基準値以上の場合に、
前記車両位置予測部は、前記第2の移動体情報、地図情報及び前記情報記録部に記録されている走行経路履歴のうちのいずれかに基づいて、前記移動体の将来位置と前記目標経路とが一致するか否か予測し、前記移動体の将来位置と前記目標経路とが一致しないと予測した場合、前記移動体の少なくとも位置情報及び角度を含む補正情報を作成する、請求項3に記載の位置推定装置。
【請求項5】
前記認識部は、
前記環境情報を取得した前記環境情報取得装置毎の信頼度及び第2の移動体情報の信頼度を算出する信頼度算出部と、算出された前記信頼度を比較する信頼度比較部と、前記環境情報取得装置の検知範囲を変更する指示を作成する検知範囲変更指示作成部と、をさらに備え、
前記信頼度比較部は、前記算出された前記信頼度のうち最も高い前記信頼度が第2の基準値より小さいか否か比較し、
前記検知範囲変更指示作成部は、前記信頼度が第2の基準値よりも小さいと判定された場合、前記環境情報取得装置の検知範囲を変更する指示を作成する、請求項1に記載の位置推定装置。
【請求項6】
前記認識部は、
前記環境情報を取得した前記環境情報取得装置毎の信頼度及び第2の移動体情報の信頼度を算出する信頼度算出部と、算出された前記信頼度を比較する信頼度比較部と、前記移動体に確認動作を行う指示を作成する確認動作指示作成部と、前記確認動作指示作成部により作成された指示による動作が実施されたか確認する動作確認部と、をさらに備え、
前記信頼度比較部は、前記算出された前記信頼度のうち最も高い前記信頼度が第3の基準値より小さいか否か比較し、
前記確認動作指示作成部は、前記信頼度が第3の基準値よりも小さいと判定された場合、前記信頼度を上げるための確認動作指示を作成し、
前記動作確認部は、前記確認動作指示作成部により作成された指示による動作が実施されたことを確認するとともに、
前記信頼度算出部は前記信頼度を再計算する、請求項1に記載の位置推定装置。
【請求項7】
請求項1から6のいずれか1項に記載の位置推定装置と、複数の前記環境情報取得装置と、前記移動体と、を備え、前記位置推定装置と複数の前記環境情報取得装置との間及び前記位置推定装置と前記移動体との間で通信が行われる交通管制システムであって、
前記移動体は、
前記位置推定装置から受信した前記位置情報に基づいて自己位置を取得するとともに、前記統合環境情報及び前記自己位置に基づいて走行する、交通管制システム。
発明の詳細な説明
【技術分野】
【0001】
本願は、位置推定装置及び交通管制システムに関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、自動車の自動運転技術の開発が盛んに行われている。自動運転を行ううえで、また自動運転に限らず、所望の車両の動作制御を行うためには、車両の現在位置、姿勢に関する情報を高精度で取得する必要がある。位置推定装置は、車両の現在位置、姿勢を推定する装置である。
【0003】
位置推定装置を用いて車両の現在位置、姿勢を推定する手法として衛星測位手法がある。これは、車両に搭載されている衛星測位装置を用いて位置推定を行うものである。しかし、衛星測位手法を用いる場合、衛星測位の不安定時において、センサ誤差を補正する必要がある。例えば、特許文献1では、位置推定する場合に、衛星測位手法のみでなく、地物と車両の相対位置を算出する手法、道路線形データなどの情報を用いるなどの他の方法を併用して、衛星測位センサの誤差を補正することが記載されている。
【0004】
また、特許文献2には、自車両における衛星測位センサの誤差を衛星測位センサの誤差が少ない他車両から補完する技術が開示されている。衛星測位センサの誤差が少ない他車両から自車両の相対位置を車両間通信によって、リレー形式で自車両の推定位置の特定、補正を行うことが記載されている。
【先行技術文献】
【特許文献】
【0005】
特許第7034379号公報
特開2022-118535号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
衛星測位センサは高価であるものの、特許文献1に開示された技術においては、高価な衛星測位センサを車両に搭載していても他の手法との併用せざるを得ない場合がある。また、推測航法を用いて自己位置を推定する場合も、推定精度には限界がある。さらに、特許文献2に開示された技術においては、他車両のうち少なくとも1つの車両に高価な衛星測位センサが搭載されていなければ、精度よく安定的に車両の現在位置、姿勢を推定することはできない。
【0007】
本願は、上記のような課題を解決するための技術を開示するものであり、車両に衛星測位センサを搭載していなくとも、所望の車両の動作制御を行うための自車両の現在位置、姿勢に関する情報を高精度で推定可能な位置推定装置及び交通管制システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本願に開示される位置推定装置は、
移動体の位置、角度及び速度を少なくとも含む第1の移動体情報と前記移動体周辺の少なくとも白線を含む道路情報を含む環境情報とを、複数の環境情報取得装置から受信する情報受信部、
受信した前記環境情報を統合化して、前記移動体の位置情報を含む統合環境情報を作成する認識部、
前記情報受信部で受信した前記第1の移動体情報及び前記環境情報と、前記認識部で作成された前記統合環境情報とを記録する情報記録部、及び
前記認識部で作成された前記統合環境情報を前記移動体に送信する情報送信部を備えたものである。
【発明の効果】
【0009】
本願によれば、車両に衛星測位センサを搭載していなくとも、所望の車両の動作制御を行うための自車両の現在位置、姿勢に関する情報を高精度で推定することが可能となる。
【図面の簡単な説明】
【0010】
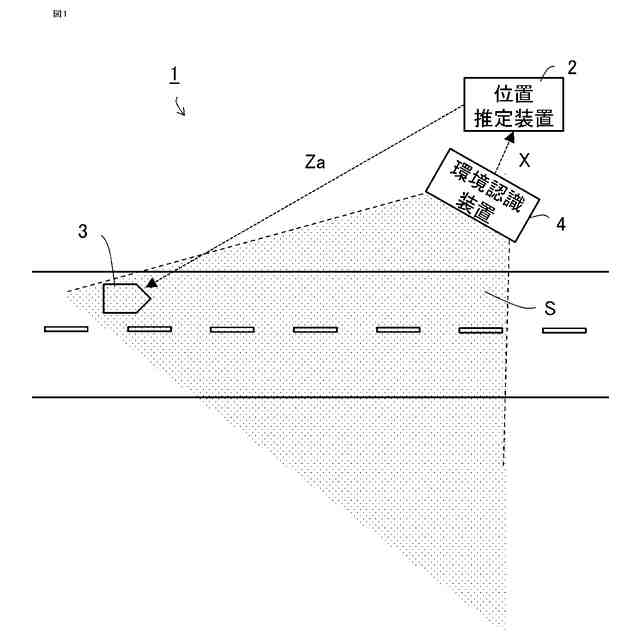
実施の形態1に係る交通管制システムの構成を示す図である。
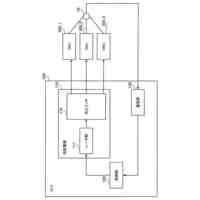
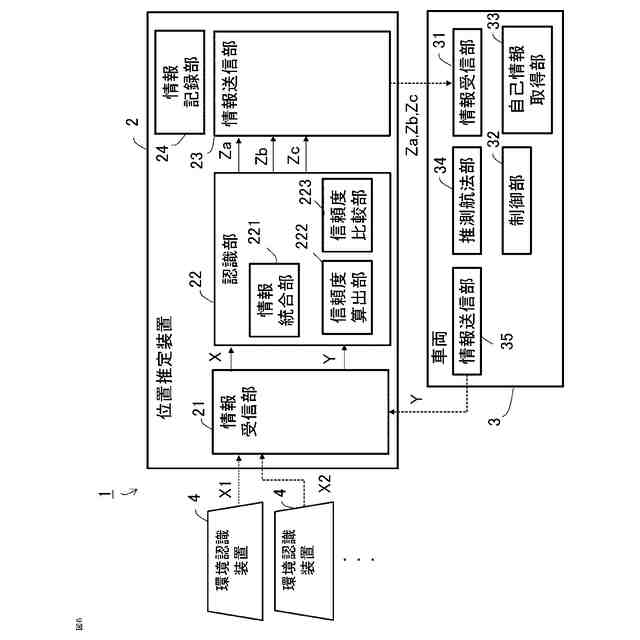
実施の形態1に係る交通管制システムの各構成部の機能ブロック図である。
実施の形態1に係る位置推定装置の動作を示すフローチャートである。
実施の形態1に係る位置推定装置のハードウェア構成図である。
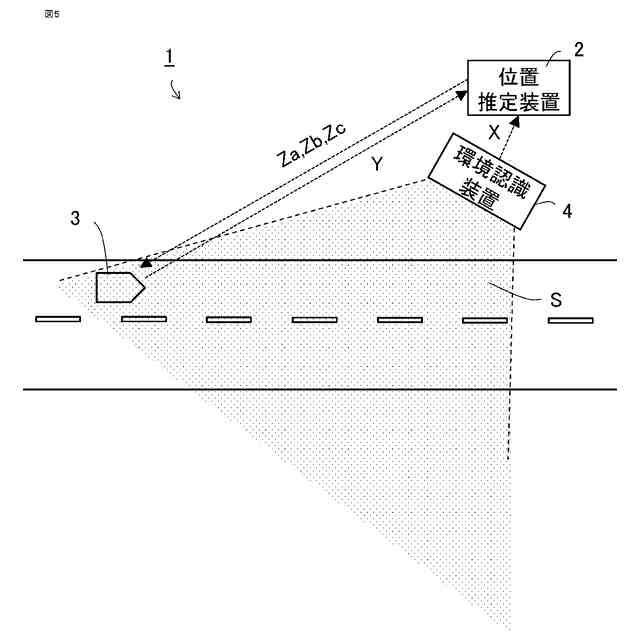
実施の形態2に係る交通管制システムの構成を示す図である。
実施の形態2に係る交通管制システムの各構成を示す機能ブロック図である。
実施の形態2に係る位置推定装置の動作を示すフローチャートである。
信頼度の算出を説明するための俯瞰図で、図8Aは車両が車線に沿って走行している例、図8Bは車両が車線に対して斜めに向いている例である。
信頼度の算出を説明するための環境認識装置から見た図で、図9Aは図8Aに対応する図、図9Bは図8Bに対応する図である。
信頼度に対応する補正情報について説明する図である。
信頼度に対応する補正情報について説明する図である。
実施の形態3に係る交通管制システムの各構成を示す機能ブロック図である。
実施の形態3に係る位置推定装置の動作を示すフローチャートである。
車両の将来位置を予測する方法を説明するための図である。
車両の将来位置を予測する方法を説明するための図である。
車両の将来位置を予測する方法を説明するための図である。
車両の将来位置を予測する方法を説明するための図である。
実施の形態4に係る交通管制システムの構成を示す図である。
実施の形態4に係る交通管制システムの各構成を示す機能ブロック図である。
実施の形態4に係る位置推定装置の動作を示すフローチャートである。
環境認識装置の検知範囲を変更する指示を生成する方法を説明するための図で、図21Aは調整前の状態を示す図、図21Bは調整後の状態を示す図である。
実施の形態5に係る交通管制システムの各構成を示す機能ブロック図である。
実施の形態5に係る位置推定装置の動作を示すフローチャートである。
信頼度を確認する動作の指示生成方法を説明するための図で、図24Aは車両後方から見た状態を示す図、図24Bは車両側方から見た状態を示す図、図24Cは、図24Aにおいて確認動作後の状態を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
筐体
17日前
三菱電機株式会社
モータ
24日前
三菱電機株式会社
換気扇
18日前
三菱電機株式会社
冷蔵庫
16日前
三菱電機株式会社
清掃具
2日前
三菱電機株式会社
冷蔵庫
24日前
三菱電機株式会社
開閉器
27日前
三菱電機株式会社
冷蔵庫
10日前
三菱電機株式会社
吸音体
27日前
三菱電機株式会社
梱包材
11日前
三菱電機株式会社
電子機器
18日前
三菱電機株式会社
駆動回路
9日前
三菱電機株式会社
照明器具
9日前
三菱電機株式会社
給湯装置
4日前
三菱電機株式会社
照明器具
20日前
三菱電機株式会社
照明器具
23日前
三菱電機株式会社
制御装置
16日前
三菱電機株式会社
誘導装置
16日前
三菱電機株式会社
保護継電器
11日前
三菱電機株式会社
直流遮断器
2日前
三菱電機株式会社
加熱調理器
27日前
三菱電機株式会社
電気掃除機
16日前
三菱電機株式会社
漏電遮断器
2日前
三菱電機株式会社
加熱調理器
18日前
三菱電機株式会社
光通信装置
3日前
三菱電機株式会社
加熱調理器
16日前
三菱電機株式会社
半導体装置
3日前
三菱電機株式会社
加熱調理器
23日前
三菱電機株式会社
半導体装置
3日前
三菱電機株式会社
空気調和機
27日前
三菱電機株式会社
加熱調理器
16日前
三菱電機株式会社
加熱調理器
18日前
三菱電機株式会社
加熱調理器
27日前
三菱電機株式会社
半導体装置
12日前
三菱電機株式会社
非可逆回路
12日前
三菱電機株式会社
電力変換器
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ