TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024141755
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023053570
出願日
2023-03-29
発明の名称
車両制御装置、車両制御方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/08 20120101AFI20241003BHJP(車両一般)
要約
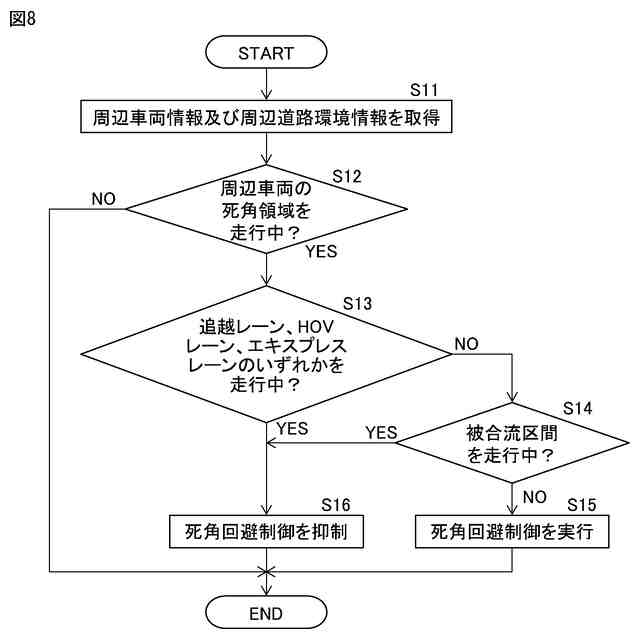
【課題】周辺車両の死角領域の走行を自車両に回避させる死角回避制御を適切に実行する。
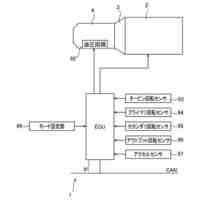
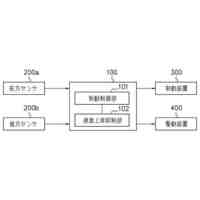
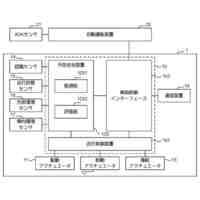
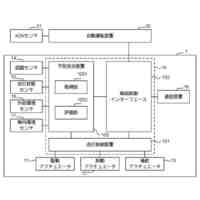
【解決手段】車両制御装置12は、自車両10の周辺車両情報及び周辺道路環境情報を取得する取得部231と、周辺車両情報に基づいて周辺車両の死角領域を走行することを自車両10に回避させる死角回避制御を実行する第1機能を有する制御部232とを備え、制御部232は、周辺道路環境情報に基づいて自車両10が追越レーン又は優先レーンを走行中に死角回避制御を抑制する第2機能と、周辺道路環境情報に基づいて自車両10が被合流区間を走行中に死角回避制御を抑制する第3機能との少なくとも一方を有する。
【選択図】図8
特許請求の範囲
【請求項1】
自車両の周辺車両情報及び周辺道路環境情報を取得する取得部と、
前記周辺車両情報に基づいて周辺車両の死角領域を走行することを前記自車両に回避させる死角回避制御を実行する第1機能を有する制御部と、を備え、
前記制御部は、
前記周辺道路環境情報に基づいて前記自車両が追越レーン又は優先レーンを走行中に前記死角回避制御を抑制する第2機能と、
前記周辺道路環境情報に基づいて前記自車両が被合流区間を走行中に前記死角回避制御を抑制する第3機能と、の少なくとも一方を有する、車両制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記制御部は、
前記死角回避制御を抑制するか否かを判定する作動判定部と、
前記死角回避制御を抑制するための前記自車両の加減速度を演算する機能を少なくとも有する車両操作量演算部と、を備える、請求項1に記載の車両制御装置。
【請求項3】
前記制御部は、
前記自車両に備えられているGPSユニット及び地図情報ユニットから得られる前記自車両の位置情報及び地図情報と、前記自車両に備えられているカメラから得られる前記自車両の周辺の画像データとの少なくとも一方に基づいて、前記自車両が前記追越レーン、HOV(High Occupancy Vehicle)レーン及びエキスプレスレーンのいずれかを走行中であるか否かを判定する機能を有する、請求項1又は2に記載の車両制御装置。
【請求項4】
前記制御部は、
前記自車両に備えられているGPSユニット及び地図情報ユニットから得られる前記自車両の位置情報及び地図情報と、前記自車両に備えられているカメラから得られる前記自車両の周辺の画像データとの少なくとも一方に基づいて、前記自車両が前記被合流区間を走行中であるか否かを判定する機能を有する、請求項1又は2に記載の車両制御装置。
【請求項5】
前記被合流区間を含むレーンである被合流レーンと合流レーンとの間には、ゼブラゾーンが存在し、
前記被合流区間が、前記被合流レーンのうちのハードノーズとソフトノーズとの間の区間と、前記ソフトノーズと合流終端との間の区間とによって構成されている、請求項1又は2に記載の車両制御装置。
【請求項6】
前記被合流区間を含むレーンである被合流レーンと合流レーンとの間には、ゼブラゾーンが存在せず、
前記被合流区間が、前記被合流レーンのうちの合流終端から所定距離の位置と前記合流終端との間の区間によって構成されている、請求項1又は2に記載の車両制御装置。
【請求項7】
前記制御部が前記死角回避制御を実行している状態で前記自車両が前記被合流区間外から前記被合流区間内に移動した場合に、前記制御部は、前記死角回避制御を実行するための前記自車両の減速制御を実行することなく、前記自車両の速度上昇抑制制御を実行し、
前記制御部が前記死角回避制御を実行していない状態で前記自車両が前記被合流区間外から前記被合流区間内に移動した場合に、前記制御部は、前記死角回避制御を開始しない、請求項1又は2に記載の車両制御装置。
【請求項8】
車両制御装置が、自車両の周辺車両情報及び周辺道路環境情報を取得する取得ステップと、
前記車両制御装置が、前記周辺車両情報に基づいて周辺車両の死角領域を走行することを前記自車両に回避させる死角回避制御を実行することを含む制御ステップと、を備える車両制御方法であって、
前記制御ステップには、
前記自車両が追越レーン又は優先レーンを走行中に前記車両制御装置が前記周辺道路環境情報に基づいて前記死角回避制御を抑制することと、
前記自車両が被合流区間を走行中に前記車両制御装置が前記周辺道路環境情報に基づいて前記死角回避制御を抑制することと、の少なくとも一方が含まれる、車両制御方法。
【請求項9】
プロセッサに、
自車両の周辺車両情報及び周辺道路環境情報を取得する取得ステップと、
前記周辺車両情報に基づいて周辺車両の死角領域を走行することを前記自車両に回避させる死角回避制御を実行することを含む制御ステップと、を実行させるためのプログラムであって、
前記制御ステップには、
前記自車両が追越レーン又は優先レーンを走行中に前記周辺道路環境情報に基づいて前記死角回避制御を抑制することと、
前記自車両が被合流区間を走行中に前記周辺道路環境情報に基づいて前記死角回避制御を抑制することと、の少なくとも一方が含まれる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、他車両の運転者の死角領域内に自車両が位置する時間又は可能性を自動的且つ積極的に低減する技術について記載されている。特許文献1に記載された技術では、他車両の走行状態に基づいて他車両の運転者の死角領域内に自車両が位置する時間又は確率が低減されるように自車両の目標速度が調整される。
【先行技術文献】
【特許文献】
【0003】
特許第4045811号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば自車両が追越レーン等を走行中に周辺車両(他車両)の死角領域を走行することを自車両に回避させる死角回避制御が実行されると、自車両が周辺車両を追い越せなくなってしまうおそれがある。また、例えば合流レーンに隣接する被合流レーンを自車両が走行中であって合流車両が合流レーンを走行中に、例えば被合流レーンを隔てて合流レーンの反対側に位置するレーンを走行中の周辺車両の死角領域を走行することを自車両に回避させる死角回避制御(例えば自車両の減速制御等)が実行されると、合流レーンから被合流レーンへの合流車両の合流が自車両によって阻害されるおそれがある。
【0005】
上述した点に鑑み、本開示は、周辺車両の死角領域の走行を自車両に回避させる死角回避制御を適切に実行することができる車両制御装置、車両制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本開示の一態様は、自車両の周辺車両情報及び周辺道路環境情報を取得する取得部と、前記周辺車両情報に基づいて周辺車両の死角領域を走行することを前記自車両に回避させる死角回避制御を実行する第1機能を有する制御部と、を備え、前記制御部は、前記周辺道路環境情報に基づいて前記自車両が追越レーン又は優先レーンを走行中に前記死角回避制御を抑制する第2機能と、前記周辺道路環境情報に基づいて前記自車両が被合流区間を走行中に前記死角回避制御を抑制する第3機能と、の少なくとも一方を有する、車両制御装置である。
【0007】
(2)(1)の車両制御装置では、前記制御部は、前記死角回避制御を抑制するか否かを判定する作動判定部と、前記死角回避制御を抑制するための前記自車両の加減速度を演算する機能を少なくとも有する車両操作量演算部と、を備えてもよい。
【0008】
(3)(1)又は(2)の車両制御装置では、前記制御部は、前記自車両に備えられているGPSユニット及び地図情報ユニットから得られる前記自車両の位置情報及び地図情報と、前記自車両に備えられているカメラから得られる前記自車両の周辺の画像データとの少なくとも一方に基づいて、前記自車両が前記追越レーン、HOVレーン及びエキスプレスレーンのいずれかを走行中であるか否かを判定する機能を有してもよい。
【0009】
(4)(1)~(3)のいずれかの車両制御装置では、前記制御部は、前記自車両に備えられているGPSユニット及び地図情報ユニットから得られる前記自車両の位置情報及び地図情報と、前記自車両に備えられているカメラから得られる前記自車両の周辺の画像データとの少なくとも一方に基づいて、前記自車両が前記被合流区間を走行中であるか否かを判定する機能を有してもよい。
【0010】
(5)(1)~(4)のいずれかの車両制御装置では、前記被合流区間を含むレーンである被合流レーンと合流レーンとの間には、ゼブラゾーンが存在し、前記被合流区間が、前記被合流レーンのうちのハードノーズとソフトノーズとの間の区間と、前記ソフトノーズと合流終端との間の区間とによって構成されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電池交換式自動車
2か月前
個人
空気圧調節式ホイール。
10日前
個人
連結式、キャンピングカー
2か月前
日本精機株式会社
車外表示装置
2日前
個人
移動手段のミラーカバー。
2か月前
日本精機株式会社
運転支援装置
1か月前
東レ株式会社
車両用エアバッグ
23日前
日本精機株式会社
表示システム
1か月前
株式会社SUBARU
車両
3日前
ダイハツ工業株式会社
車両
9日前
ダイハツ工業株式会社
車両
10日前
豊田合成株式会社
車両
23日前
ダイハツ工業株式会社
レバー
2か月前
豊田合成株式会社
車両
23日前
スズキ株式会社
車両制御装置
1か月前
日本化薬株式会社
ガス発生器
2か月前
日本化薬株式会社
ガス発生器
2日前
エムケー精工株式会社
車両処理装置
13日前
三菱マヒンドラ農機株式会社
作業車両
2か月前
ダイハツ工業株式会社
搭載構造
16日前
豊田合成株式会社
乗員保護装置
19日前
豊田合成株式会社
乗員保護装置
3日前
株式会社小糸製作所
車両用灯具
2か月前
ダイハツ工業株式会社
搭載構造
16日前
個人
ブレーキ踏み間違い救済システム
23日前
ダイハツ工業株式会社
分解構造
2か月前
株式会社小糸製作所
ヒーター装置
9日前
トヨタ自動車株式会社
車両
1か月前
株式会社デンソー
清掃装置
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
加藤電機株式会社
車両用警報装置
1か月前
株式会社豊田自動織機
車両
9日前
個人
加速抑制機能付アクセルペダル装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ