TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024136013
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023046960
出願日
2023-03-23
発明の名称
圃場管理装置、圃場管理方法、及びプログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
A01G
7/00 20060101AFI20240927BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
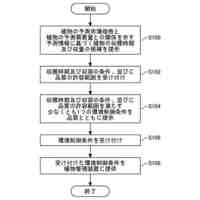
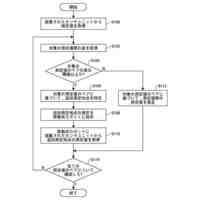
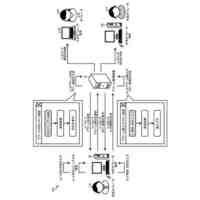
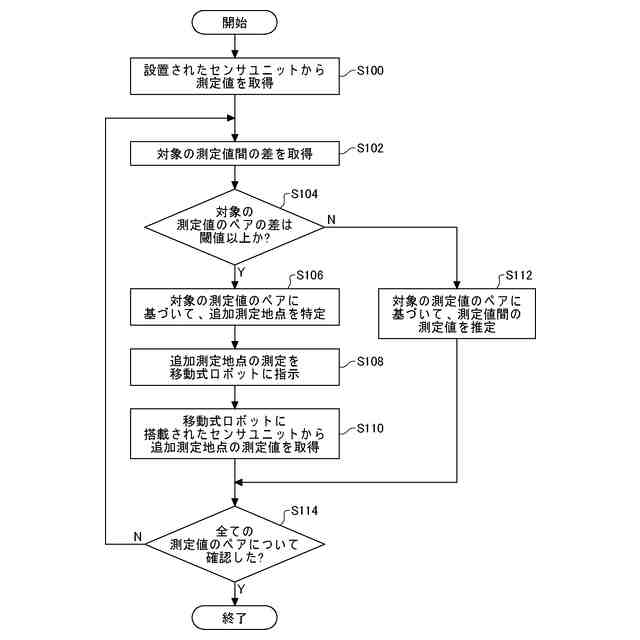
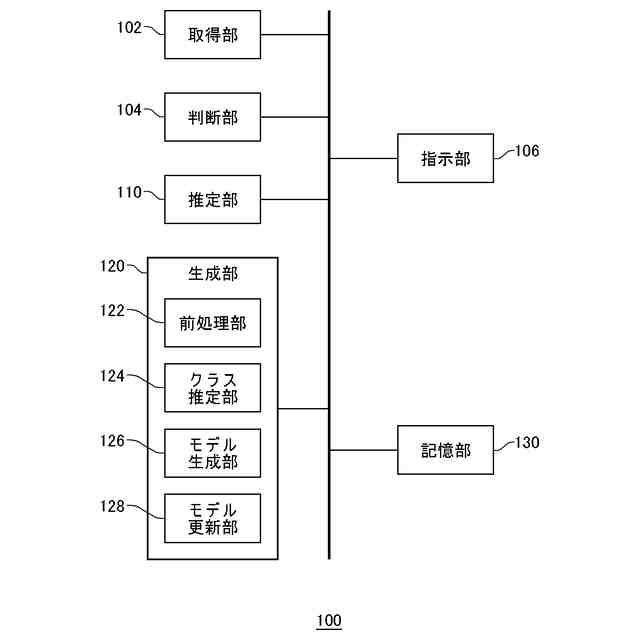
【解決手段】圃場管理装置は、圃場内の第1地点に設けられた第1センサで測定された前記第1地点の第1測定値、及び前記圃場内の第2地点に設けられた第2センサで測定された前記第2地点の第2測定値を取得する取得部と、前記第1測定値及び前記第2測定値に基づいて、第3センサを搭載する移動式ロボットを前記第1地点と前記第2地点との間の第3地点まで移動させて、前記移動式ロボットに前記第3センサで前記第3地点の第3測定値を測定させるか否かを判断する判断部と、前記判断部が前記第3地点の第3測定値を測定すると判断した場合、前記移動式ロボットに対して前記第3地点の測定を指示する指示部とを備えてよい。
【選択図】図5
特許請求の範囲
【請求項1】
圃場内の第1地点に設けられた第1センサで測定された前記第1地点の第1測定値、及び前記圃場内の第2地点に設けられた第2センサで測定された前記第2地点の第2測定値を取得する取得部と、
前記第1測定値及び前記第2測定値に基づいて、第3センサを搭載する移動式ロボットを前記第1地点と前記第2地点との間の第3地点まで移動させて、前記移動式ロボットに前記第3センサで前記第3地点の第3測定値を測定させるか否かを判断する判断部と、
前記判断部が前記第3地点の第3測定値を測定すると判断した場合、前記移動式ロボットに対して前記第3地点の測定を指示する指示部と
を備える圃場管理装置。
続きを表示(約 1,100 文字)
【請求項2】
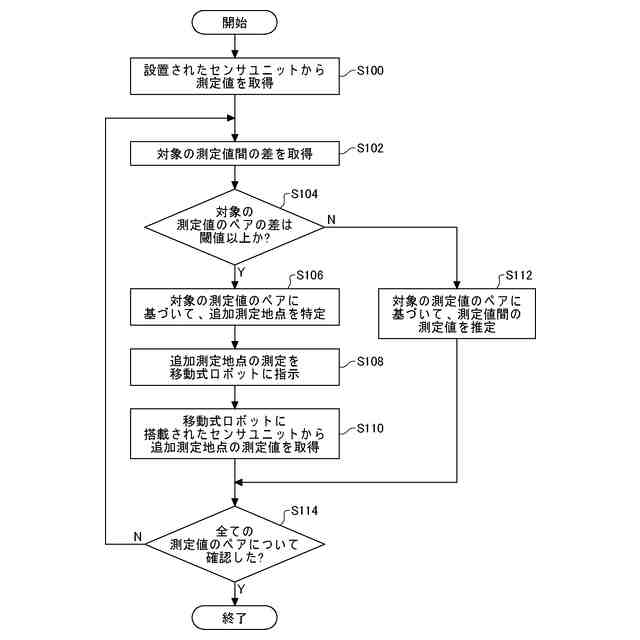
前記判断部は、前記第1測定値と前記第2測定値との差が閾値以上の場合、前記移動式ロボットに前記第3センサで前記第3地点の前記第3測定値を測定させると判断する、請求項1に記載の圃場管理装置。
【請求項3】
前記第1測定値と前記第2測定値との差が閾値より小さい場合、前記第1測定値と前記第2測定値との内挿補間により前記第3地点の前記第3測定値を推定する推定部をさらに備える、請求項1に記載の圃場管理装置。
【請求項4】
前記判断部は、前記第1測定値または前記第2測定値の同一時間帯での測定値間の差が閾値以上の場合、前記移動式ロボットに前記第3センサで前記第3地点の前記第3測定値を測定させると判断する、請求項1に記載の圃場管理装置。
【請求項5】
前記第1測定値または前記第2測定値の同一時間帯での測定値間の差が閾値より小さい場合、前記第1測定値と前記第2測定値との内挿補間により前記第3地点の前記第3測定値を推定する推定部をさらに備える、請求項1に記載の圃場管理装置。
【請求項6】
前記推定部は、前記第1センサ及び前記第2センサのそれぞれで測定された前記第1地点及び前記第2地点の温度、湿度、及び光量を説明変数として、前記第3センサで測定された前記第3地点の温度、湿度、及び光量を目的変数とする学習済み予測モデルを用いて、前記内挿補間を実行する、請求項3または5に記載の圃場管理装置。
【請求項7】
前記指示部は、前記第1測定値と前記第2測定値との差が大きいほど、前記第3センサで前記第3地点の前記第3測定値を測定する頻度が多くなるように、前記移動式ロボットに対して前記第3地点の測定を指示する、請求項2に記載の圃場管理装置。
【請求項8】
前記判断部は、前記第1測定値と前記第2測定値との差が閾値以上の場合、前記移動式ロボットに前記第3センサで複数の前記第3地点のそれぞれの前記第3測定値を測定させると判断する、請求項1に記載の圃場管理装置。
【請求項9】
前記指示部は、前記第1測定値と前記第2測定値との差が大きいほど、前記移動式ロボットに対して測定を指示する前記第3地点の数が多くなるように、前記移動式ロボットに対して前記第3地点の測定を指示する、請求項8に記載の圃場管理装置。
【請求項10】
前記指示部は、前記第1測定値及び前記第2測定値に基づいて、前記第3地点の位置を決定する、請求項1に記載の圃場管理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場管理装置、圃場管理方法、及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、葉の表面の照度(または日照度合)または裏面の温湿度(温度または湿度のうち一方または双方)、葉色、葉から排出される二酸化炭素の濃度等を検出する葉面環境センサが開示されている。
[先行技術文献]
[特許文献]
[特許文献1] 特開2022-100732号公報
【発明の概要】
【0003】
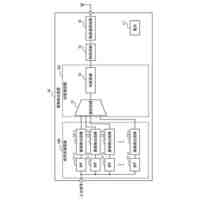
本発明の一態様に係る圃場管理装置は、圃場内の第1地点に設けられた第1センサで測定された前記第1地点の第1測定値、及び前記圃場内の第2地点に設けられた第2センサで測定された前記第2地点の第2測定値を取得する取得部を備えてよい。前記圃場管理装置は、前記第1測定値及び前記第2測定値に基づいて、第3センサを搭載する移動式ロボットを前記第1地点と前記第2地点との間の第3地点まで移動させて、前記移動式ロボットに前記第3センサで前記第3地点の第3測定値を測定させるか否かを判断する判断部を備えてよい。前記圃場管理装置は、前記判断部が前記第3地点の第3測定値を測定すると判断した場合、前記移動式ロボットに対して前記第3地点の測定を指示する指示部を備えてよい。
【0004】
前記圃場管理装置において、前記判断部は、前記第1測定値と前記第2測定値との差が閾値以上の場合、前記移動式ロボットに前記第3センサで前記第3地点の前記第3測定値を測定させると判断してよい。
【0005】
いずれかの前記圃場管理装置は、前記第1測定値と前記第2測定値との差が閾値より小さい場合、前記第1測定値と前記第2測定値との内挿補間により前記第3地点の前記第3測定値を推定する推定部をさらに備えてよい。
【0006】
いずれかの前記圃場管理装置において、前記判断部は、前記第1測定値または前記第2測定値の同一時間帯での測定値間の差が閾値以上の場合、前記移動式ロボットに前記第3センサで前記第3地点の前記第3測定値を測定させると判断してよい。
【0007】
いずれかの前記圃場管理装置は、前記第1測定値または前記第2測定値の同一時間帯での測定値間の差が閾値より小さい場合、前記第1測定値と前記第2測定値との内挿補間により前記第3地点の前記第3測定値を推定する推定部をさらに備えてよい。
【0008】
いずれかの前記圃場管理装置において、前記推定部は、前記第1センサ及び前記第2センサのそれぞれで測定された前記第1地点及び前記第2地点の温度、湿度、及び光量を説明変数として、前記第3センサで測定された前記第3地点の温度、湿度、及び光量を目的変数とする学習済み予測モデルを用いて、前記内挿補間を実行してよい。
【0009】
いずれかの前記圃場管理装置において、前記指示部は、前記第1測定値と前記第2測定値との差が大きいほど、前記第3センサで前記第3地点の前記第3測定値を測定する頻度が多くなるように、前記移動式ロボットに対して前記第3地点の測定を指示してよい。
【0010】
いずれかの前記圃場管理装置において、前記判断部は、前記第1測定値と前記第2測定値との差が閾値以上の場合、前記移動式ロボットに前記第3センサで複数の前記第3地点のそれぞれの前記第3測定値を測定させると判断してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
測定装置
1日前
横河電機株式会社
状態特定方法
15日前
横河電機株式会社
2線式伝送器
1日前
横河電機株式会社
ガス分析装置
15日前
横河電機株式会社
ガス分析装置
15日前
横河電機株式会社
振動検出装置
1日前
横河電機株式会社
光パルス試験器
5日前
横河電機株式会社
合成装置および合成方法
5日前
横河電機株式会社
装置、方法およびプログラム
1日前
横河電機株式会社
診断装置、診断方法及び診断プログラム
1日前
横河電機株式会社
管理装置、管理方法および管理プログラム
5日前
横河電機株式会社
装置、方法、生成装置、および、プログラム
1日前
横河電機株式会社
条件提示装置、条件提示方法、及びプログラム
1日前
横河電機株式会社
圃場管理装置、圃場管理方法、及びプログラム
1日前
横河電機株式会社
植物管理装置、植物管理方法、及びプログラム
1日前
横河電機株式会社
制御システム、制御方法および制御プログラム
1日前
横河電機株式会社
植物管理装置、植物管理方法、及びプログラム
1日前
横河電機株式会社
情報処理装置、情報処理方法、及びプログラム
1日前
横河電機株式会社
プロセッサモジュール、制御方法及び制御プログラム
8日前
横河電機株式会社
プロトコル変換装置、方法、プログラム、及びシステム
15日前
横河電機株式会社
情報処理装置、情報処理方法および情報処理プログラム
4日前
横河電機株式会社
液体サンプリングバルブの保全管理方法及び保全管理装置
15日前
横河電機株式会社
防食システム、防食モニタリングシステム及びその構築方法
2日前
横河電機株式会社
情報処理装置、生産計画作成方法及び生産計画作成プログラム
5日前
横河電機株式会社
生産施設および研究施設においてタスクを自動的に最適化する方法
4日前
横河電機株式会社
光学プローブ接続構造、光学プローブアセンブリ及び分光分析装置
5日前
横河電機株式会社
アラーム管理装置、アラーム管理方法およびアラーム管理プログラム
5日前
横河電機株式会社
撮影システム、撮影システムの制御方法、解析装置、及び、プログラム
5日前
横河電機株式会社
仮想流量演算装置、仮想流量演算方法、および、仮想流量演算プログラム
1日前
横河電機株式会社
情報処理装置、情報処理方法、情報処理プログラム及び分散制御システム
4日前
横河電機株式会社
情報処理装置、情報処理システム、情報処理方法および情報処理プログラム
1日前
横河電機株式会社
エネルギー管理システム、エネルギー管理方法及びエネルギー管理プログラム
5日前
横河電機株式会社
情報処理装置、情報処理方法、情報処理プログラム及びプロセス制御システム
5日前
横河電機株式会社
情報処理装置、インターホンシステムの子機、情報処理方法、及びプログラム
1日前
横河電機株式会社
カーボンナノチューブ分散液、その製造方法、及びカーボンナノチューブ複合体
1日前
横河電機株式会社
生育状態推定装置、植物管理システム、生育状態推定方法、植物管理方法、及びプログラム
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ