TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024130650
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023040499
出願日
2023-03-15
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
30/188 20120101AFI20240920BHJP(車両一般)
要約
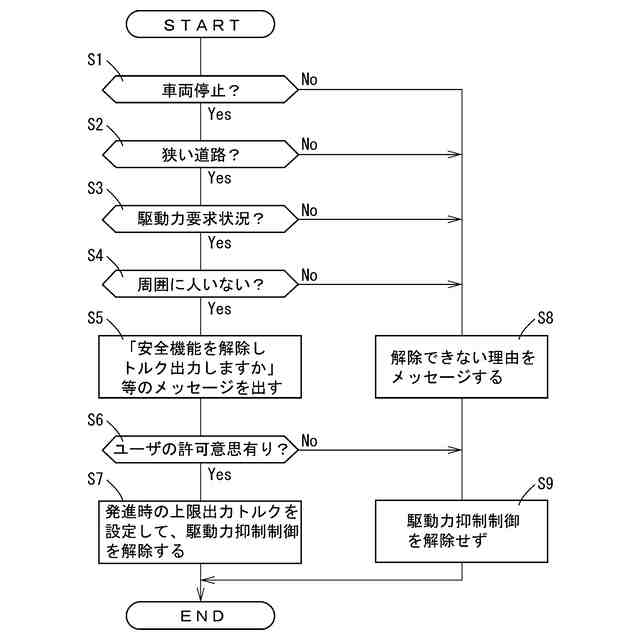
【課題】道幅が狭い道路で発進できなくなることを抑制できる運転支援装置の提供。
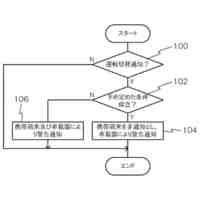
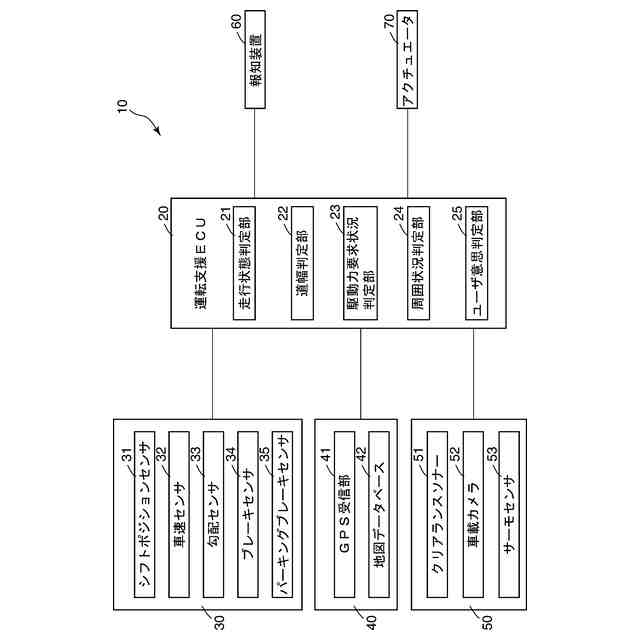
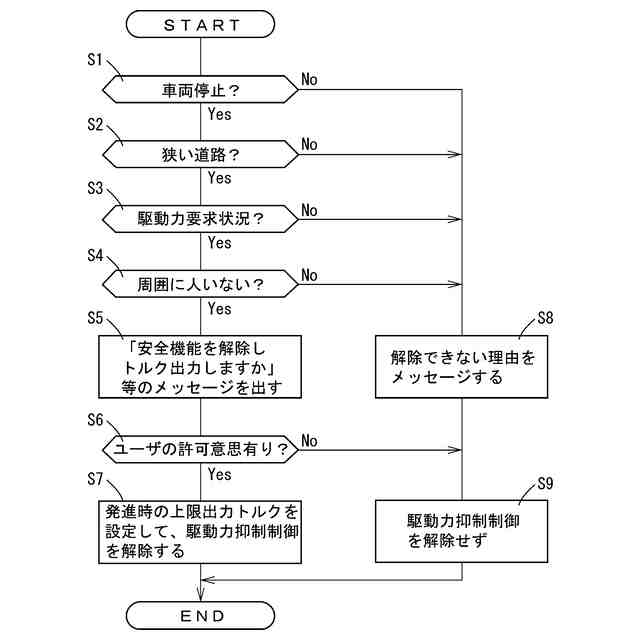
【解決手段】走行状態判定部21が停止状態であると判定し、道幅判定部22が所定値以下の狭い道路であると判定し、駆動力要求状況判定部23が駆動力要求状況にあると判定し、かつ、周囲状況判定部24が周囲に人はいないと判定する場合に、駆動力抑制制御の解除許可をユーザに通知し、ユーザの許可意思が確認できる場合には駆動力抑制制御を解除する。そのため、道幅が狭い道路において、駆動力抑制制御が働いてしまい、駆動力低下により車両が発進できなくなることを抑制できる。
【選択図】 図2
特許請求の範囲
【請求項1】
車両が周囲の物体に衝突することを回避するために前記車両の駆動力抑制制御を実行する、運転支援装置であって、
前記車両が停止状態にあるか走行状態にあるかを判定する走行状態判定部と、
現在位置が、道幅が所定値以下の狭い道路であるか否かを判定する道幅判定部と、
駆動力が要求される駆動力要求状況にあるか否かを判定する駆動力要求状況判定部と、
周囲の人の有無を判定する周囲状況判定部と、
を有し、
前記走行状態判定部が停止状態であると判定し、前記道幅判定部が所定値以下の狭い道路であると判定し、前記駆動力要求状況判定部が駆動力要求状況にあると判定し、かつ、前記周囲状況判定部が周囲に人はいないと判定する場合に、前記駆動力抑制制御の解除許可をユーザに通知し、該ユーザの許可意思が確認できる場合には前記駆動力抑制制御を解除する、運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、レーダやカメラ等の装置を用いて車両の周囲の物体を検知し、車両が周囲の物体に衝突する可能性が高い場合に車両の駆動力を抑制する制御を実行する、運転支援装置を開示している。
【0003】
ところで、道幅が狭い道路では、車両と周囲の物体とが比較的近い位置にあり、車両が周囲の物体に衝突する可能性が高いと判定して駆動力抑制制御が実行されてしまうおそれがある。この場合、坂道や段差など駆動力が要求される状況にあると、駆動力が足らず、車両が発進できなくなるおそれがある。
【0004】
しかし、上記特許文献1には、狭い道路での駆動力については、何ら記載がない。
【先行技術文献】
【特許文献】
【0005】
特開2019-182314号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の目的は、道幅が狭い道路で発進できなくなることを抑制できる運転支援装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成する本発明はつぎの通りである。
(1) 車両が周囲の物体に衝突することを回避するために前記車両の駆動力抑制制御を実行する、運転支援装置であって、
前記車両が停止状態にあるか走行状態にあるかを判定する走行状態判定部と、
現在位置が、道幅が所定値以下の狭い道路であるか否かを判定する道幅判定部と、
駆動力が要求される駆動力要求状況にあるか否かを判定する駆動力要求状況判定部と、
周囲の人の有無を判定する周囲状況判定部と、
を有し、
前記走行状態判定部が停止状態であると判定し、前記道幅判定部が所定値以下の狭い道路であると判定し、前記駆動力要求状況判定部が駆動力要求状況にあると判定し、かつ、前記周囲状況判定部が周囲に人はいないと判定する場合に、前記駆動力抑制制御の解除許可をユーザに通知し、該ユーザの許可意思が確認できる場合には前記駆動力抑制制御を解除する、運転支援装置。
(2) 前記駆動力抑制制御を解除する場合に、必要駆動力を算出して、前記駆動力抑制制御が解除される状態にあるときにおける上限出力トルクを設定する、(1)記載の運転支援装置。
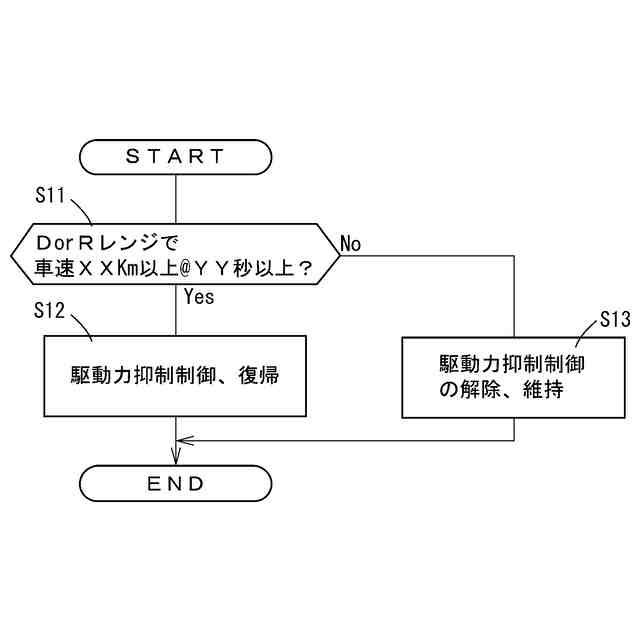
(3) 前記駆動力抑制制御が解除された状態にあるとき、前記走行状態判定部が所定車速以上の状態が所定時間以上継続していると判定する場合に、前記駆動力抑制制御の解除をオフして前記駆動力抑制制御を復帰させる、(1)記載の運転支援装置。
【発明の効果】
【0008】
上記(1)の運転支援装置によれば、つぎの効果を得ることができる。
走行状態判定部が停止状態であると判定し、道幅判定部が所定値以下の狭い道路であると判定し、駆動力要求状況判定部が駆動力要求状況にあると判定し、かつ、周囲状況判定部が周囲に人はいないと判定する場合に、駆動力抑制制御の解除許可をユーザに通知し、ユーザの許可意思が確認できる場合には駆動力抑制制御を解除するため、道幅が狭い道路において、駆動力抑制制御が働いてしまい、駆動力低下により車両が発進できなくなることを抑制できる。
また、周囲状況判定部が周囲に人はいないと判定する場合に、駆動力抑制制御を解除するため、駆動力抑制制御を解除しても安全性を確保できる。
さらにまた、駆動力抑制制御の解除許可をユーザに通知し、ユーザの許可意思が確認できる場合に、駆動力抑制制御を解除するため、ユーザの意思に反して駆動力抑制制御が解除されてしまうことを抑制できる。
【0009】
上記(2)の運転支援装置によれば、駆動力抑制制御を解除する場合に、必要駆動力を算出して、駆動力抑制制御が解除される状態にあるときにおける上限出力トルクを設定するため、駆動力抑制制御の解除時における出力トルクを必要最小限にすることができる。そのため、駆動力抑制制御を解除することによる安全機能の低下を最小限に抑えることができる。
【0010】
上記(3)の運転支援装置によれば、駆動力抑制制御が解除された状態にあるとき、走行状態判定部が所定車速以上の状態が所定時間以上継続していると判定する場合に、駆動力抑制制御の解除をオフして駆動力抑制制御を復帰させるため、駆動力抑制制御の解除を一時的なものとすることができる。そのため、駆動力抑制制御を解除することによる安全機能の低下を一時的なものとすることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
移動体
12日前
トヨタ自動車株式会社
電極体
10日前
トヨタ自動車株式会社
回転電機
10日前
トヨタ自動車株式会社
駆動装置
4日前
トヨタ自動車株式会社
端末装置
3日前
トヨタ自動車株式会社
検査装置
10日前
トヨタ自動車株式会社
管理装置
3日前
トヨタ自動車株式会社
端末装置
18日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
電気自動車
10日前
トヨタ自動車株式会社
プログラム
10日前
トヨタ自動車株式会社
車両制御装置
18日前
トヨタ自動車株式会社
搬送システム
4日前
トヨタ自動車株式会社
搬送ロボット
10日前
トヨタ自動車株式会社
電源システム
10日前
トヨタ自動車株式会社
冷却システム
10日前
トヨタ自動車株式会社
冷却システム
10日前
トヨタ自動車株式会社
ブリーザ装置
18日前
トヨタ自動車株式会社
車両評価方法
10日前
トヨタ自動車株式会社
電源システム
11日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
情報処理装置
10日前
トヨタ自動車株式会社
電圧監視装置
11日前
トヨタ自動車株式会社
照度推定装置
11日前
トヨタ自動車株式会社
水素供給装置
10日前
トヨタ自動車株式会社
組成予測方法
18日前
トヨタ自動車株式会社
作業監視方法
12日前
トヨタ自動車株式会社
作業評価装置
10日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
水素供給装置
10日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
水素供給装置
10日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
シミュレータ
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ