TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024127177
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023036155
出願日
2023-03-09
発明の名称
車両制御装置の評価装置、車両制御装置の評価システム、および、車両制御装置の評価方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G01M
17/007 20060101AFI20240912BHJP(測定;試験)
要約
【課題】開発管理において、車両制御装置の評価を効率的に行うことを可能にする。
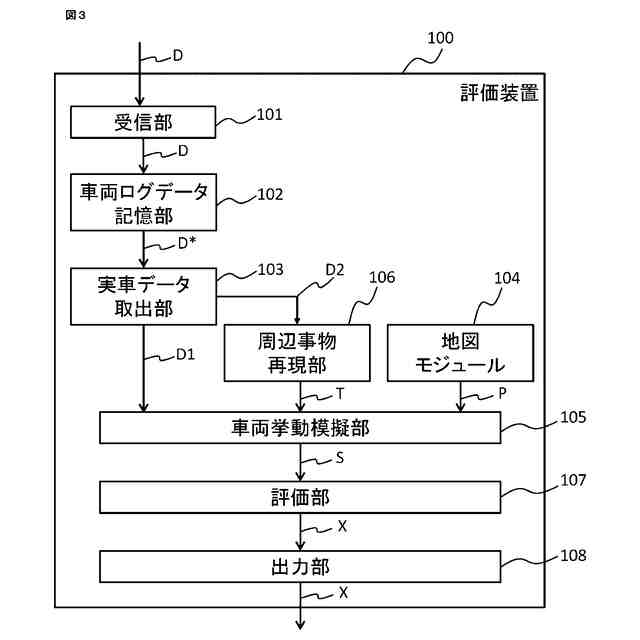
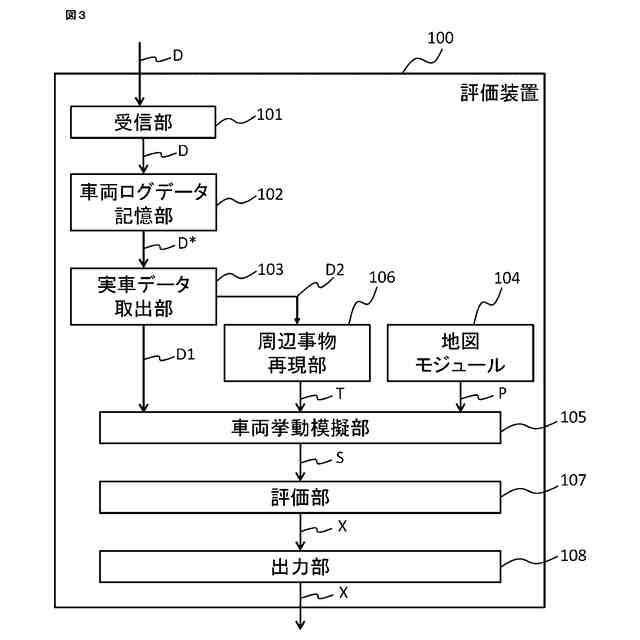
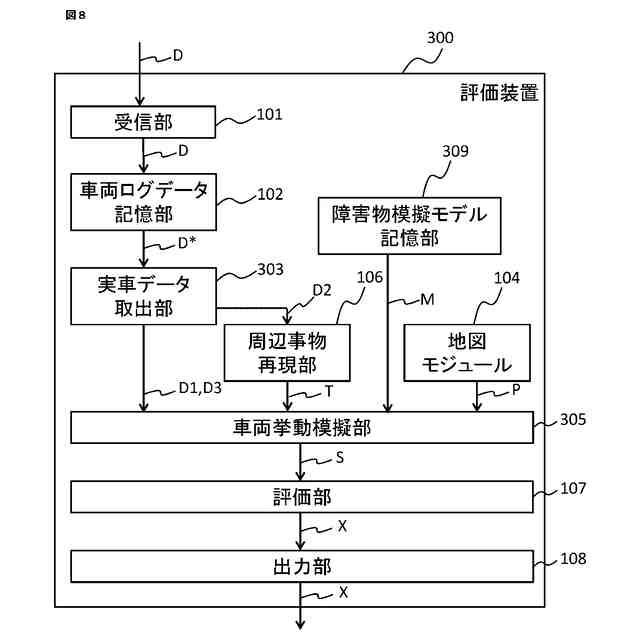
【解決手段】評価装置100は、車両から収集した実車データDから、車両の挙動の模擬に用いる実車データD1、D2を取り出す実車データ取出部103と、車両の走行場所の周辺地図データPを記憶する地図モジュール104と、実車データD1および周辺地図データPに基づいて、シミュレーション環境に仮想的な車両および車両の走行場所の周辺地図を再現し、シミュレーション環境で、評価対象の車両制御ロジックにしたがって車両の挙動を模擬する車両挙動模擬部105と、実車データD2に基づいて、シミュレーション環境に周辺事物を再現する周辺事物再現部106と、車両挙動模擬結果Sに基づいて、車両制御装置を評価する評価部107とを備える。
【選択図】図3
特許請求の範囲
【請求項1】
車両の走行時における位置情報を少なくとも含む実車データを前記車両から収集し、前記実車データを用いて評価対象の車両制御装置の評価を行う車両制御装置の評価装置であって、
収集した前記実車データから、前記車両の挙動の模擬に用いる実車データを取り出す実車データ取出部と、
前記車両の走行場所の周辺地図を示す周辺地図データを記憶する地図データ記憶部と、
前記実車データおよび前記周辺地図データに基づいて、シミュレーション環境に仮想的な前記車両および前記車両の走行場所の周辺地図を再現し、前記シミュレーション環境で、前記車両制御装置の車両制御ロジックにしたがって前記車両の挙動を模擬する車両挙動模擬部と、
前記実車データに基づいて、前記シミュレーション環境に前記走行場所の周辺事物を再現させる周辺事物再現部と、
前記車両挙動模擬部による模擬の結果に基づいて、前記車両制御装置を評価する評価部と、
前記評価部による評価の結果を出力する出力部とを備えることを特徴とする車両制御装置の評価装置。
続きを表示(約 1,800 文字)
【請求項2】
他車両が前記車両と同じ走行環境で走行している場合に、該他車両の実車データを同一環境走行データとして、
前記実車データ取出部は、収集した前記実車データから前記同一環境走行データを取り出し、前記車両挙動模擬部は、前記同一環境走行データを用いて前記車両の挙動を模擬する請求項1に記載の車両制御装置の評価装置。
【請求項3】
前記実車データは、前記車両と相互作用をする障害物のデータを含み、
前記車両制御装置の評価装置は、前記障害物のシミュレーションモデルである障害物模擬モデルを記憶する障害物模擬モデル記憶部をさらに備え、
前記車両挙動模擬部は、前記障害物模擬モデルを用いて前記シミュレーション環境において前記障害物の挙動を模擬しながら、前記車両の挙動を模擬する請求項1または2に記載の車両制御装置の評価装置。
【請求項4】
前記障害物模擬モデルを機械学習により学習させ、学習済みの前記障害物模擬モデルを生成する障害物模擬モデル生成部をさらに備え、
前記車両挙動模擬部は、学習済みの前記障害物模擬モデルを用いて前記障害物の挙動を模擬する請求項3に記載の車両制御装置の評価装置。
【請求項5】
前記実車データは、前記車両および前記障害物の位置、速度および加速度を示すデータ、および、前記周辺事物の位置示すデータを含み、
前記障害物模擬モデル生成部は、前記実車データを学習用データとして蓄積する学習用データ蓄積部と、
前記学習用データを入力とし、前記障害物の挙動を前記障害物模擬モデルに学習させて学習済みの前記障害物模擬モデルを生成する障害物模擬モデル学習部とを備える請求項4に記載の車両制御装置の評価装置。
【請求項6】
前記障害物模擬モデル生成部は、
前記障害物模擬モデルによって模擬される対象の障害物が配置され、前記対象の障害物の位置、速度、および加速度を含む障害物挙動データと、前記対象の障害物の周辺の物体の位置、速度、および加速度を含む障害物周辺データとを取得可能なシミュレーション環境を生成し、与えられた行動指示に基づいて前記対象の障害物が行動する場合の状況を再生するシミュレータを有し、予め定められた基準に従って前記行動指示に対する報酬を計算するとともに、前記報酬と、前記対象の障害物の行動によってそれぞれ更新された前記障害物挙動データおよび前記障害物周辺データを出力するシミュレーション再生部と、
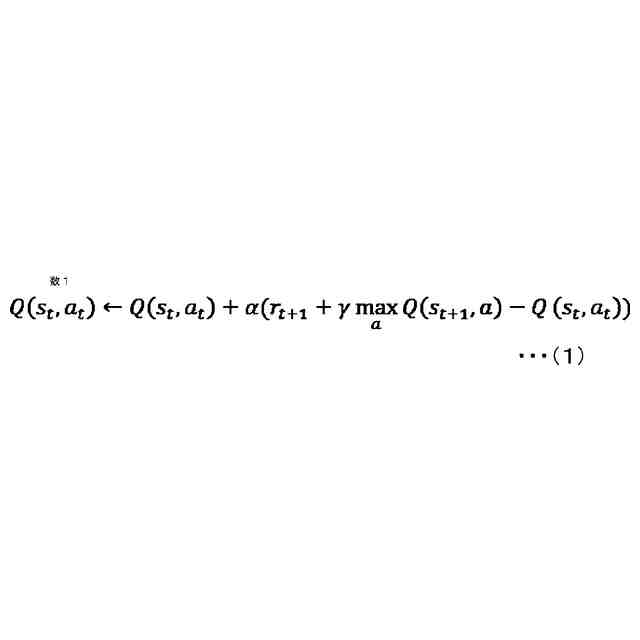
前記シミュレーション再生部から入力される前記報酬、前記障害物挙動データ、および前記障害物周辺データに基づいて、強化学習により前記対象の障害物の模擬モデルを更新し、学習済みの前記障害物模擬モデルを生成する障害物模擬モデル学習部とを備える請求項4に記載の車両制御装置の評価装置。
【請求項7】
前記車両の挙動を模擬する際に、前記車両および前記周辺事物の少なくとも一方の初期状態を変更することによりシミュレーションシナリオを変更するシナリオ変更部をさらに備え、
前記車両挙動模擬部は、前記シナリオ変更部により変更された前記初期状態に基づいて前記車両の挙動を模擬する請求項1に記載の車両制御装置の評価装置。
【請求項8】
前記シナリオ変更部は、前記初期状態をランダムに変更させる請求項7に記載の車両制御装置の評価装置。
【請求項9】
前記シナリオ変更部は、前記実車データを用いて複数の前記シミュレーションシナリオを生成するシナリオ群生成部と、
予め定められた評価基準によりそれぞれの前記シミュレーションシナリオの評価値を計算するシナリオ評価部と、
それぞれの前記シミュレーションシナリオの前記評価値が目標値以上か否かを判定し、前記評価値が前記目標値以上であるシミュレーションシナリオを採用する判定部とを備え、前記シミュレーションシナリオを、前記判定部に採用されたシミュレーションシナリオに変更する請求項7に記載の車両制御装置の評価装置。
【請求項10】
前記評価値は、前記車両と、前記車両の周辺の物体との間の距離が予め定められた距離以下になるか否かに基づいて計算される請求項9に記載の車両制御装置の評価装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、車両制御装置の評価装置、車両制御装置の評価システム、および、車両制御装置の評価方法に関するものである。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
車両制御装置の開発管理においては、開発段階の装置が実車における試験で不具合を起こすことを防ぐため、事前のデバッグ工程で不具合の原因を除去することが要求される。これに関し、実車において計測されたデータを基に、解析対象の車両制御装置のECU(Electronic Control Unit)内のRAM(Random Access Memory)がどのような値を取っていたかをシミュレーション環境で再現し、実車で発生した不具合の原因の特定を図るものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2004-19508号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、開発管理においてECUの車両制御ロジックが改修され、それに応じて自車両の挙動が変わることが想定される場合、同様の不具合が発生するか、また、他の不具合が発生しないかは直ちには分からず、車両制御ロジックの改修部分の影響を改めて検証する必要がある。このため、従来の技術では、改修後のECU、すなわち車両制御装置を効率的に評価できない虞があるという問題点がある。
【0005】
本願は、上記のような課題を解決するための技術を開示するものであり、車両制御装置の評価を効率的に行うことを可能にする車両制御装置の評価装置、車両制御装置の評価システム、および、車両制御装置の評価方法を得ることを目的とする。
【課題を解決するための手段】
【0006】
本願に開示される車両制御装置の評価装置は、車両の走行時における位置情報を少なくとも含む実車データを車両から収集し、実車データを用いて評価対象の車両制御装置の評価を行う車両制御装置の評価装置であって、収集した実車データから、車両の挙動の模擬に用いる実車データを取り出す実車データ取出部と、車両の走行場所の周辺地図を示す周辺地図データを記憶する地図データ記憶部と、実車データおよび周辺地図データに基づいて、シミュレーション環境に仮想的な車両および車両の走行場所の周辺地図を再現し、シミュレーション環境で、車両制御装置の車両制御ロジックにしたがって車両の挙動を模擬する車両挙動模擬部と、実車データに基づいて、シミュレーション環境に走行場所の周辺事物を再現させる周辺事物再現部と、車両挙動模擬部による模擬の結果に基づいて、車両制御装置を評価する評価部と、評価部による評価の結果を出力する出力部とを備えるものである。
【0007】
また、本願に開示される車両評価装置の評価方法は、車両の走行時における位置情報を少なくとも含む実車データを車両において取得し、実車データを用いて評価対象の車両制御装置の評価を行う車両制御装置の評価方法であって、車両から実車データを収集するステップと、収集した実車データから、車両の挙動の模擬に用いる実車データを取り出すステップと、車両の走行場所の周辺地図を示す周辺地図データを取得するステップと、実車データ、および周辺地図データに基づいて、シミュレーション環境に仮想的な車両および車両の走行場所の周辺地図を再現するステップと、実車データに基づいて、シミュレーション環境に走行場所の周辺事物を再現するステップと、シミュレーション環境で、車両制御装置の車両制御ロジックにしたがって車両の挙動を模擬するステップと、車両の挙動を模擬した結果に基づいて、車両制御装置を評価するステップと、車両制御装置を評価した結果を出力するステップとを備えるものである。
【発明の効果】
【0008】
本願に開示される車両制御装置の評価装置、車両制御装置の評価システム、または車両制御装置の評価方法によれば、車両制御装置の評価を効率的に行うことが可能となる。
【図面の簡単な説明】
【0009】
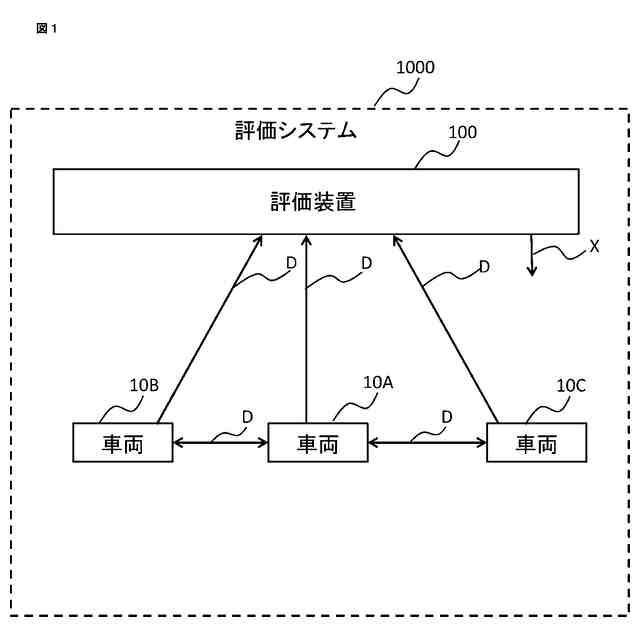
実施の形態1における車両制御装置の評価システムの概要を示す図である。
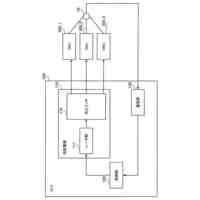
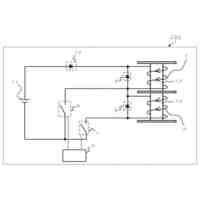
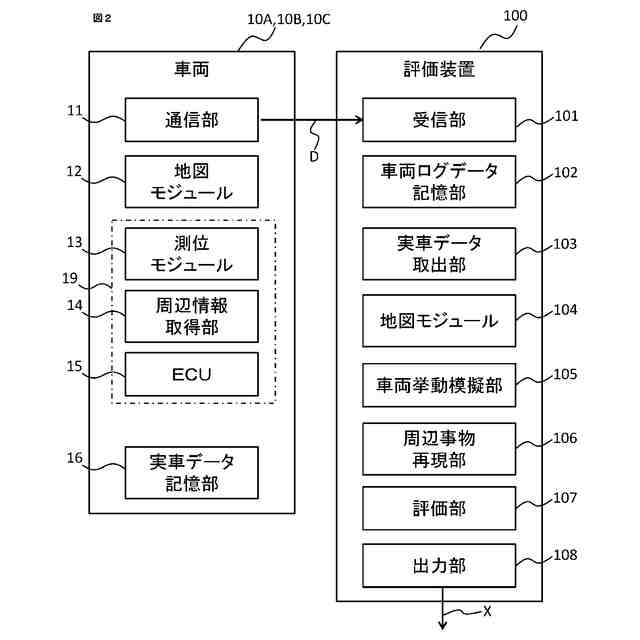
実施の形態1における車両制御装置の評価システムを示すブロック図である。
実施の形態1における車両制御装置の評価装置を示すブロック図である。
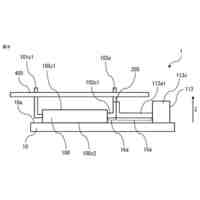
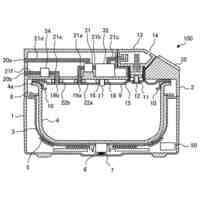
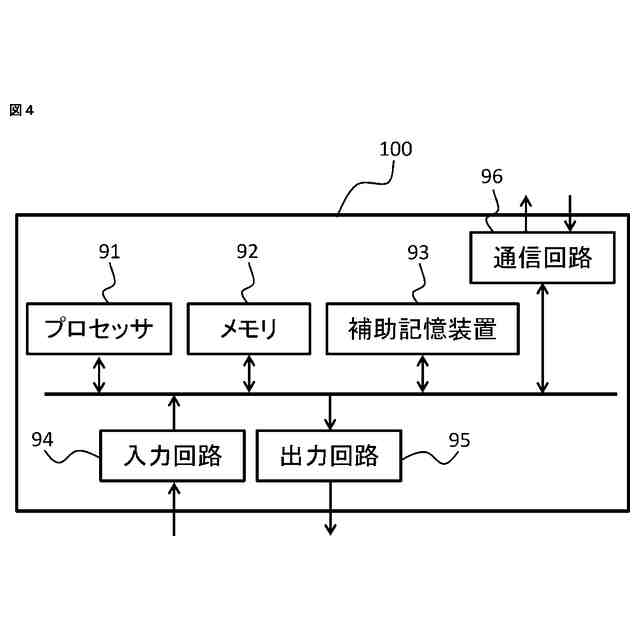
実施の形態1における車両制御装置の評価装置のハードウェア構成の例を示す図である。
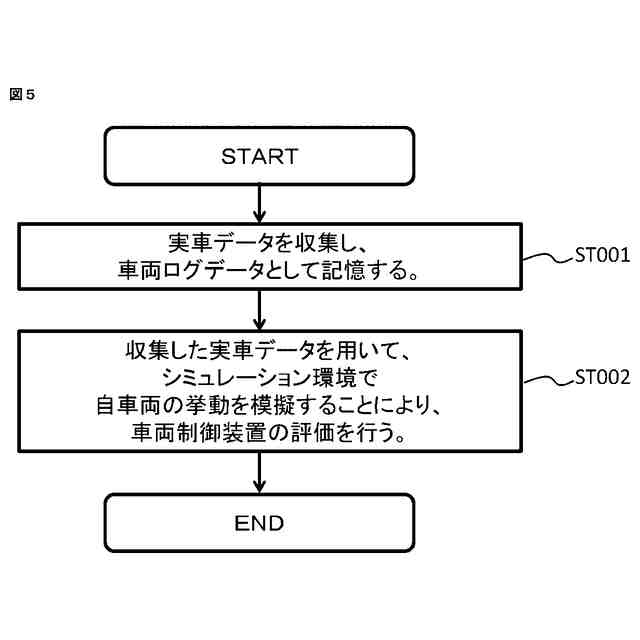
実施の形態1における車両制御装置の評価システムの動作を示すフロー図である。
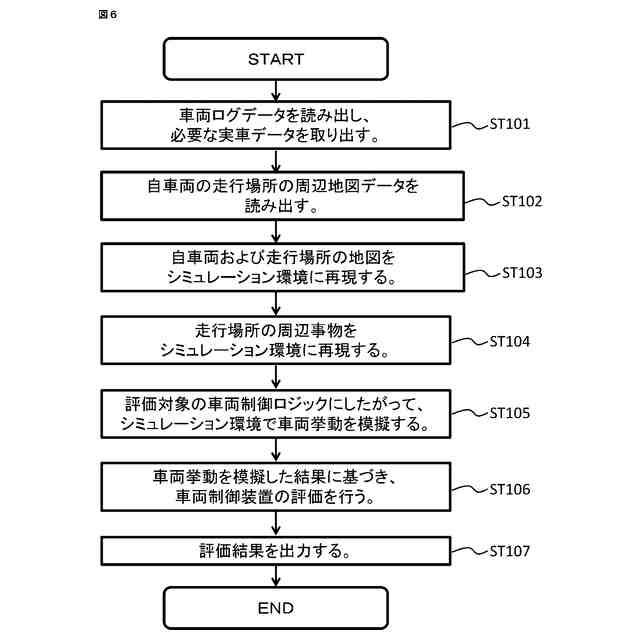
実施の形態1における車両制御装置の評価装置の動作を示すフロー図である。
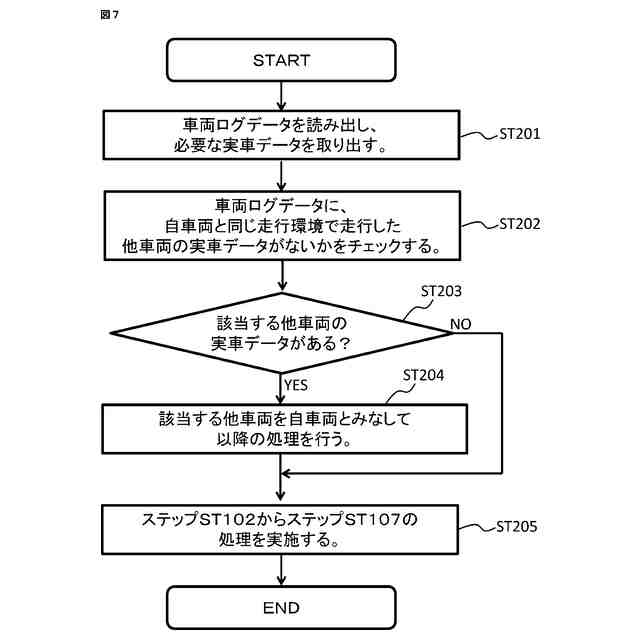
実施の形態2における車両制御装置の評価装置の動作を示すフロー図である。
実施の形態3における車両制御装置の評価装置を示すブロック図である。
実施の形態3における車両制御装置の評価装置の動作を示すフロー図である。
実施の形態4における車両制御装置の評価装置を示すブロック図である。
実施の形態4にかかる障害物模擬モデル生成部を示すブロック図である。
実施の形態4における車両制御装置の評価装置の動作を示すフロー図である。
実施の形態4にかかる障害物模擬モデル学習部による機械学習の流れを示すフロー図である。
実施の形態5における車両制御装置の評価装置を示すブロック図である。
実施の形態5にかかる障害物模擬モデル生成部を示すブロック図である。
実施の形態5にかかる障害物模擬モデル学習部を示すブロック図である。
実施の形態5にかかる障害物模擬モデル生成部による強化学習の流れを示すフロー図である。
実施の形態6における車両制御装置の評価装置を示すブロック図である。
実施の形態6における車両制御装置の評価装置の動作を示すフロー図である。
実施の形態7にかかるシナリオ変更部を示すブロック図である。
実施の形態7にかかるシナリオ変更部の動作を示すフロー図である。
実施の形態7の他の形態にかかるシナリオ変更部を示すブロック図である。
実施の形態8にかかるシナリオ変更部を示すブロック図である。
実施の形態9における車両制御装置の評価装置を示すブロック図である。
実施の形態9における車両制御装置の評価装置の動作を示すフロー図である。
実施の形態10における車両制御装置の評価システムの概要を示す図である。
実施の形態10における車両制御装置の評価システムを示すブロック図である。
【発明を実施するための形態】
【0010】
実施の形態1.
実施の形態1を図1から図6に基づいて説明する。図1は、実施の形態1における車両制御装置の評価システムの概要を示す図であり、図2は、実施の形態1における車両制御装置の評価システムを示すブロック図である。また、図3は、実施の形態1における車両制御装置の評価装置を示すブロック図である。評価システム1000、すなわち車両制御装置の評価システムは、車両10A、10B、10Cにそれぞれ搭載され、後述する実車データDを取得する実車データ取得部19(図1では図示省略)と、車両10A、10B、10Cから実車Dデータを受信し、実車データDを用いて評価対象の車両制御装置の評価をする評価装置100、すなわち車両制御装置の評価装置とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
炊飯器
19日前
三菱電機株式会社
梱包材
1か月前
三菱電機株式会社
清掃具
23日前
三菱電機株式会社
給湯機
11日前
三菱電機株式会社
冷蔵庫
17日前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
端子構造
9日前
三菱電機株式会社
駆動回路
1か月前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
照明装置
18日前
三菱電機株式会社
給湯装置
25日前
三菱電機株式会社
照明装置
10日前
三菱電機株式会社
制御装置
1か月前
三菱電機株式会社
誘導装置
1か月前
三菱電機株式会社
換気装置
11日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
光通信装置
24日前
三菱電機株式会社
電磁石装置
9日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
加熱調理器
17日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
電力変換器
23日前
三菱電機株式会社
加熱調理器
23日前
三菱電機株式会社
保護継電器
1か月前
三菱電機株式会社
非可逆回路
1か月前
三菱電機株式会社
加熱調理器
17日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
電気掃除機
9日前
三菱電機株式会社
空気清浄機
2日前
三菱電機株式会社
空気清浄機
2日前
三菱電機株式会社
空気清浄機
2日前
三菱電機株式会社
空気清浄機
2日前
三菱電機株式会社
空気清浄機
2日前
三菱電機株式会社
直流遮断器
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ