TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024126321
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023034623
出願日
2023-03-07
発明の名称
運転支援装置および運転支援装置用のプログラム
出願人
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
B60W
30/09 20120101AFI20240912BHJP(車両一般)
要約
【課題】ドライバに運転操作の安全度合いに応じた通知を行う技術において、通知をしてもドライバの運転に依然として問題が残る場合の対応策および対応策の発動の基準を提供する。
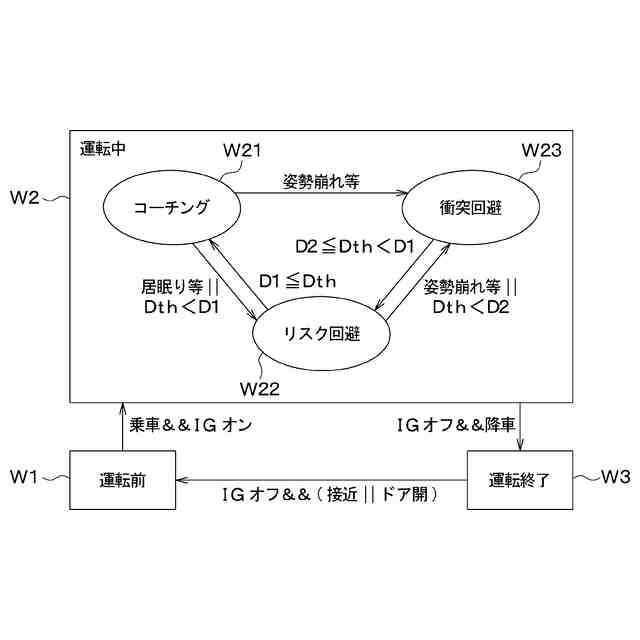
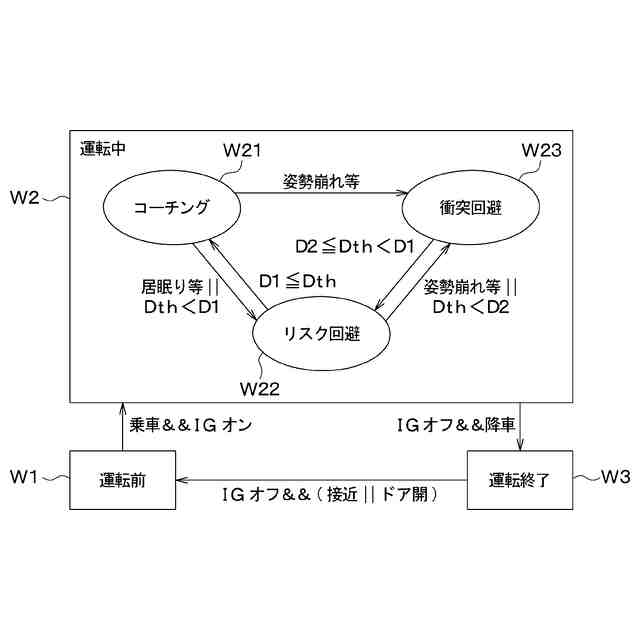
【解決手段】処理部15は、車両の運転操作の安全度を高めるための通知をコーチング状態W21で行い、それでも衝突車間距離Dthが閾値D1より低下した場合は、リスク回避状態W22に遷移して制御指示量ACC_cmdに基づいて車両を走行させる。そして、それでもリスクを回避しきれず衝突車間距離が閾値D2より低下した場合は、衝突回避状態W23に遷移して自車両を停止させる。
【選択図】図8
特許請求の範囲
【請求項1】
車両の運転支援装置であって、
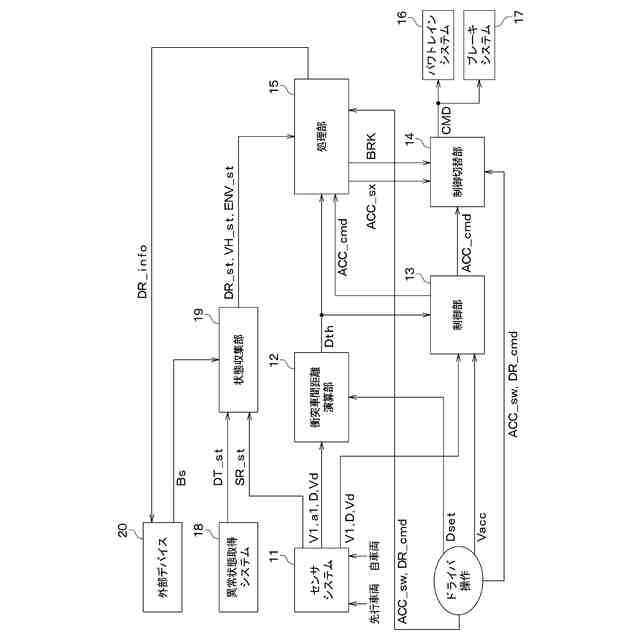
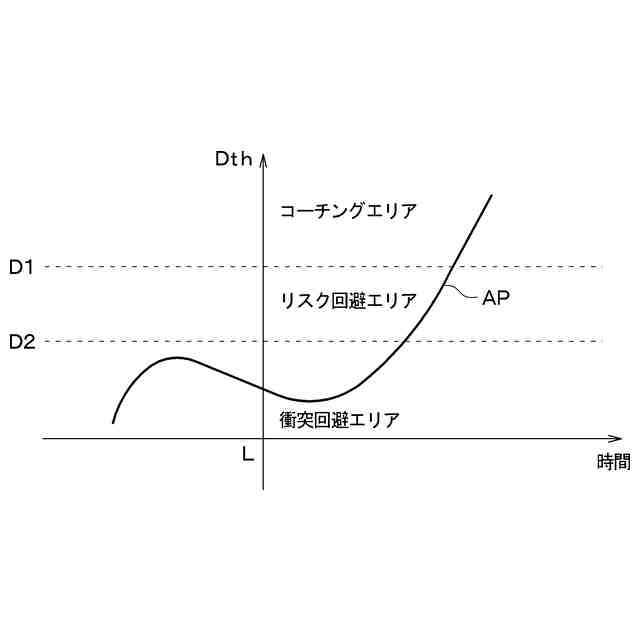
前記車両の運転中、衝突車間距離(Dth)を、前記車両から前記車両の前方を走行する先行車両までの車間距離(D)が大きくなるほど前記衝突車間距離が大きくなり、前記車両の制動距離が大きくなるほど前記衝突車間距離が小さくなるよう、算出する衝突車間距離演算部(12)と、
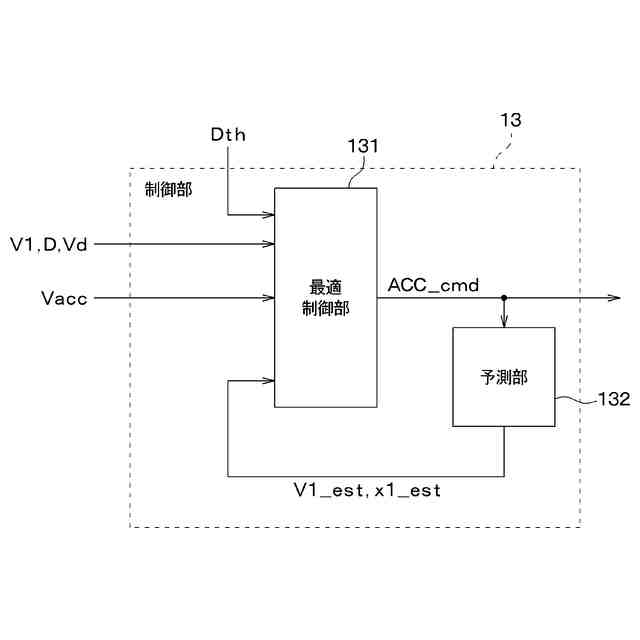
前記車両の走行速度の目標として定められた設定速度(Vacc)に追従し、かつ、前記衝突車間距離が基準距離(L)以下になる可能性を低減するよう、前記車両の加減速に関する制御指示量(ACC_cmd)を決定して出力する制御部(13)と、
前記衝突車間距離に基づいて、コーチング状態(W21)、リスク回避状態(W22)、衝突回避状態(W23)の間で状態遷移する処理部(15)と、を備え、
前記処理部は、前記コーチング状態にあるときに、前記車両の運転操作の安全度を高めるための通知をドライバに対して行うと共に、前記衝突車間距離が第1の閾値(D1)より低下したことに基づいて、前記コーチング状態から前記リスク回避状態に遷移し、
前記処理部は、前記リスク回避状態において、前記制御部が出力する前記制御指示量に従って前記車両を走行させると共に、前記衝突車間距離が前記第1の閾値よりも小さい第2の閾値(D2)より低下したことに基づいて、前記リスク回避状態から前記衝突回避状態に遷移し、
前記処理部は、前記衝突回避状態において、前記車両を停止させるよう、制動力を発生させる、運転支援装置。
続きを表示(約 1,700 文字)
【請求項2】
前記処理部は、前記コーチング状態において運転に対する集中を欠いた前記ドライバの行動が検出された場合、前記リスク回避状態に遷移し、前記コーチング状態または前記リスク回避状態において前記ドライバが運転不能であるとみなせる状態が検出された場合、前記衝突回避状態に遷移する、請求項1に記載の運転支援装置。
【請求項3】
前記処理部は、前記ドライバが前記車両から降りた場合、運転終了状態(W3)に遷移し、
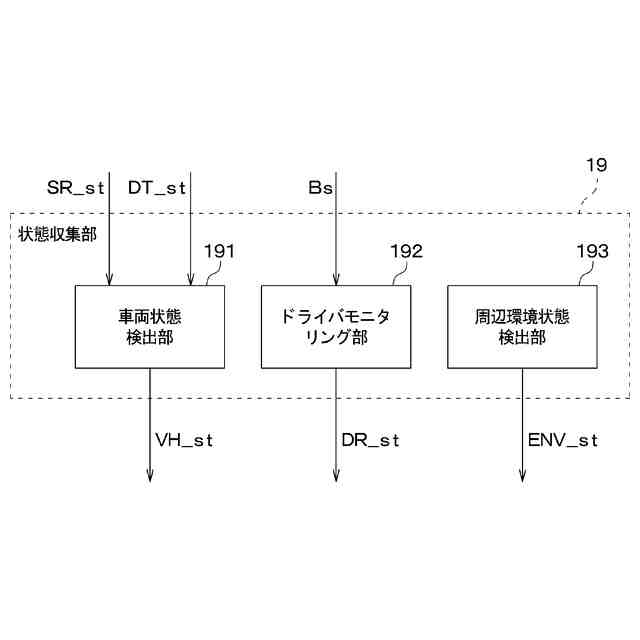
前記処理部は、前記運転終了状態において、前記車両の運転時に加減速の操作が診断された複数のイベントを、イベント毎に診断結果、発生時の前記車両の状態、発生時の前記ドライバの状態、および発生時の前記車両の周辺環境の状態のいずれか1つ以上を関連づけて、記憶する、請求項1に記載の運転支援装置。
【請求項4】
前記処理部は、前記ドライバが前記車両から降りた場合、運転終了状態(W3)に遷移し、前記運転終了状態において前記ドライバが前記車両に接近した場合、運転前状態(W1)に遷移し、
前記処理部は、前記運転前状態において、現在の前記車両の状態、現在の前記ドライバの状態、および現在の前記車両の周辺環境の状態のいずれか1つ以上に応じたメッセージを前記ドライバに通知する、請求項1に記載の運転支援装置。
【請求項5】
前記処理部は、前記ドライバが前記車両から降りた場合、前記コーチング状態から運転終了状態(W3)に遷移し、前記運転終了状態において前記ドライバが前記車両に接近した場合、運転前状態(W1)に遷移し、
前記処理部は、前記コーチング状態においては、前記車両に備え付けられた車室内向けの報知装置を用いて前記ドライバに通知を行い、前記運転終了状態または前記運転前状態においては、前記ドライバが携帯する外部デバイス(20)に前記ドライバへの通知を行わせる、請求項1に記載の運転支援装置。
【請求項6】
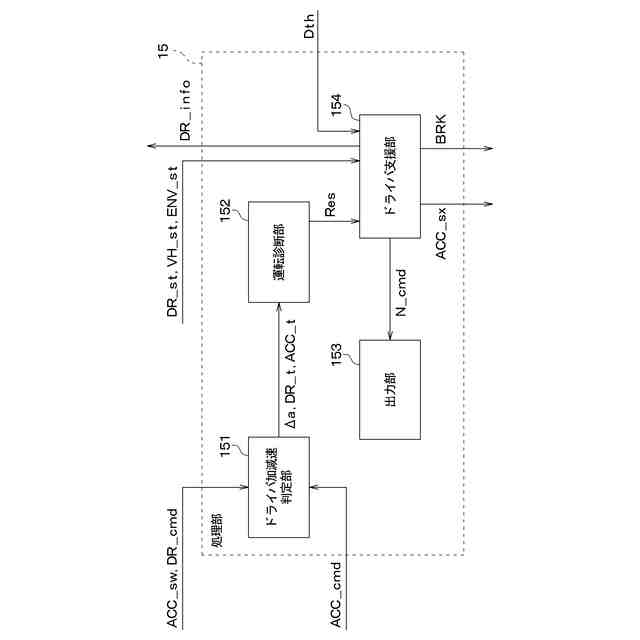
前記処理部は、前記コーチング状態において、前記制御部が出力した前記制御指示量が前記車両の駆動力および制動力を発生させる駆動制動システム(16、17)で反映されているか否かを判定し、反映されていない場合に、前記ドライバによる前記車両の前記運転操作を反映する操作情報(DR_cmd、DR_t)と、前記制御指示量の出力状況を反映する制御情報(ACC_cmd、ACC_t)との比較に基づいて、前記運転操作の診断を行い、診断結果を前記ドライバに通知する、請求項1に記載の運転支援装置。
【請求項7】
車両の運転支援装置に用いるプログラムであって、
前記車両の運転中、衝突車間距離(Dth)を、前記車両から前記車両の前方を走行する先行車両までの車間距離(D)が大きくなるほど前記衝突車間距離が大きくなり、前記車両の制動距離が大きくなるほど前記衝突車間距離が小さくなるよう、算出する衝突車間距離演算部(12)、
前記車両の走行速度の目標として定められた設定速度(Vacc)に追従し、かつ、前記衝突車間距離が基準距離(L)以下になる可能性を低減するよう、前記車両の加減速に関する制御指示量(ACC_cmd)を決定して出力する制御部(13)、および
前記衝突車間距離に基づいて、コーチング状態(W21)、リスク回避状態(W22)、衝突回避状態(W23)の間で状態遷移する処理部(15)として、前記運転支援装置を機能させ、
前記処理部は、前記コーチング状態にあるときに、前記車両の運転操作の安全度を高めるための通知をドライバに対して行うと共に、前記衝突車間距離が第1の閾値(D1)より低下したことに基づいて、前記コーチング状態から前記リスク回避状態に遷移し、
前記処理部は、前記リスク回避状態において、前記制御部が出力する前記制御指示量に従って前記車両を走行させると共に、前記衝突車間距離が前記第1の閾値よりも小さい第2の閾値(D2)より低下したことに基づいて、前記リスク回避状態から前記衝突回避状態に遷移し、
前記処理部は、前記衝突回避状態において、前記車両を停止させるよう、制動力を発生させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転支援装置および運転支援装置用のプログラムに関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1では、ドライバによる車両の運転の安全度合いを診断し、診断結果をドライバに通知する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-237827号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1のような技術では、通知をしてもドライバの運転に依然として問題が残る場合に安全確保のための手立てについて記載がない。また、そのような手立てを発動させる基準についても記載がない。
【0005】
本発明は上記点に鑑み、ドライバに運転操作の安全度合いに応じた通知を行う技術において、通知をしてもドライバの運転に依然として問題が残る場合の対応策および対応策の発動の基準を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための請求項1に記載の発明は、車両用の運転支援装置であって、
前記車両の運転中、衝突車間距離(Dth)を、前記車両から前記車両の前方を走行する先行車両までの車間距離(D)が大きくなるほど前記衝突車間距離が大きくなり、前記車両の制動距離が大きくなるほど前記衝突車間距離が小さくなるよう、算出する衝突車間距離演算部(12)と、
前記車両の走行速度の目標として定められた設定速度(Vacc)に追従し、かつ、前記衝突車間距離が基準距離(L)以下になる可能性を低減するよう、前記車両の加減速に関する制御指示量(ACC_cmd)を決定して出力する制御部(13)と、
前記衝突車間距離に基づいて、コーチング状態(W21)、リスク回避状態(W22)、衝突回避状態(W23)の間で状態遷移する処理部(15)と、を備え、
前記処理部は、前記コーチング状態にあるときに、前記車両の運転操作の安全度を高めるための通知をドライバに対して行うと共に、前記衝突車間距離が第1の閾値(D1)より低下したことに基づいて、前記コーチング状態から前記リスク回避状態に遷移し、
前記処理部は、前記リスク回避状態において、前記制御部が出力する前記制御指示量に従って前記車両を走行させると共に、前記衝突車間距離が前記第1の閾値よりも小さい第2の閾値(D2)より低下したことに基づいて、前記リスク回避状態から前記衝突回避状態に遷移し、
前記処理部は、前記衝突回避状態において、前記車両を停止させるよう、制動力を発生させる運転支援装置である。
【0007】
また、請求項7に記載の発明は、車両用の運転支援装置に用いるプログラムであって、
前記車両の運転中、衝突車間距離(Dth)を、前記車両から前記車両の前方を走行する先行車両までの車間距離(D)が大きくなるほど前記衝突車間距離が大きくなり、前記車両の制動距離が大きくなるほど前記衝突車間距離が小さくなるよう、算出する衝突車間距離演算部(12)、
前記車両の走行速度の目標として定められた設定速度(Vacc)に追従し、かつ、前記衝突車間距離が基準距離(L)以下になる可能性を低減するよう、前記車両の加減速に関する制御指示量(ACC_cmd)を決定して出力する制御部(13)、および
前記衝突車間距離に基づいて、コーチング状態(W21)、リスク回避状態(W22)、衝突回避状態(W23)の間で状態遷移する処理部(152)として、前記運転支援装置を機能させ、
前記処理部は、前記コーチング状態にあるときに、前記車両の運転操作の安全度を高めるための通知をドライバに対して行うと共に、前記衝突車間距離が第1の閾値(D1)より低下したことに基づいて、前記コーチング状態から前記リスク回避状態に遷移し、
前記処理部は、前記リスク回避状態において、前記制御部が出力する前記制御指示量に従って前記車両を走行させると共に、前記衝突車間距離が前記第1の閾値よりも小さい第2の閾値(D2)より低下したことに基づいて、前記リスク回避状態から前記衝突回避状態に遷移し、
前記処理部は、前記衝突回避状態において、前記車両を停止させるよう、制動力を発生させる、プログラムである。
【0008】
このように、運転支援装置は、車両の運転操作の安全度を高めるための通知をコーチング状態で行い、それでも衝突車間距離が第1の閾値より低下した場合は、リスク回避状態に遷移して制御指示量に基づいて車両を走行させる。そして、それでもリスクを回避しきれず衝突車間距離が第2の閾値より低下した場合は、衝突回避状態に遷移して車両を停止させる。
【0009】
このように、通知をしてもドライバの運転に依然として問題が残る場合に、段階的に運転操作によらず車両を制御する対応策を取れる。そして、そのような対応策を段階的に発動させる基準として、制御指示量の算出に用いる衝突車間距離を用いている。リスク回避状態では、衝突車間距離に基づいて算出される制御指示量に従って車両を制御するので、そのようなリスク回避状態の開始、終了を判定する基準として、衝突車間距離が適している。
【0010】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
発音器
18日前
株式会社デンソー
電機子
1日前
株式会社デンソー
モータ
17日前
株式会社デンソー
表示装置
8日前
株式会社デンソー
電気部品
今日
株式会社デンソー
光学部材
8日前
株式会社デンソー
撮像装置
1日前
株式会社デンソー
清掃装置
17日前
株式会社デンソー
受電装置
18日前
株式会社デンソー
回転電機
17日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
ステータ
8日前
株式会社デンソー
ステータ
8日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
回転電機
22日前
株式会社デンソー
表示装置
8日前
株式会社デンソー
半導体装置
7日前
株式会社デンソー
電動圧縮機
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
ロータコア
15日前
株式会社デンソー
ガスセンサ
今日
株式会社デンソー
半導体装置
1日前
株式会社デンソー
電子制御装置
16日前
株式会社デンソーエレクトロニクス
電流遮断装置
8日前
株式会社デンソー
アクセル装置
11日前
株式会社デンソー
電子制御装置
11日前
株式会社デンソーエレクトロニクス
配電システム
16日前
株式会社デンソー
換気システム
8日前
株式会社デンソー
電子制御装置
17日前
株式会社デンソー
電子制御装置
今日
株式会社デンソー
電子制御装置
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ