TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024120509
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023027346
出願日
2023-02-24
発明の名称
自動制御システム、自動制御方法、及び、自動制御プログラム
出願人
三菱重工業株式会社
代理人
SSIP弁理士法人
主分類
G05B
23/02 20060101AFI20240829BHJP(制御;調整)
要約
【課題】電子化手順に含まれる各操作ステップの進行状態を適切に管理しながら、オペレータに対してその進行状態を好適に認識させる。
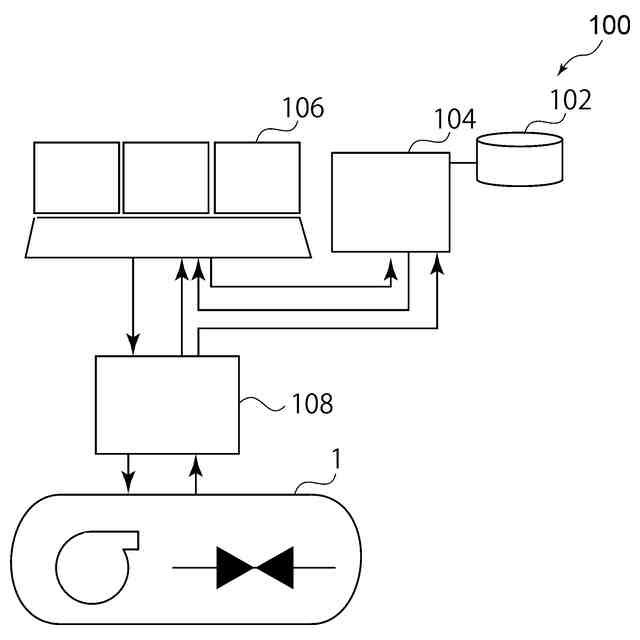
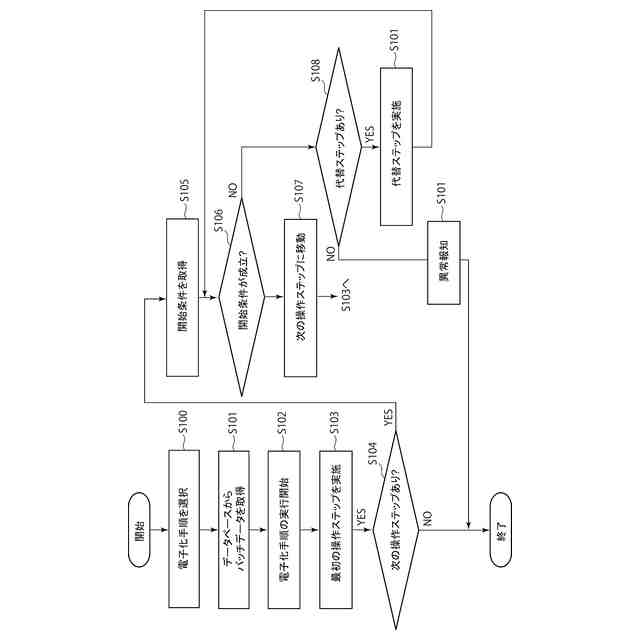
【解決手段】本開示は、複数の操作ステップを含む電子化手順に従ってプラント機器を制御するための自動制御システムに関する。自動制御システムは、複数の操作ステップ、操作ステップの開始条件、及び、プラント機器の動作状態を含むバッチデータに基づいて、プラント機器の動作状態が開始条件を満たしている場合に、開始条件に対応する操作ステップを実施するように、電子化手順の進行状態を管理する。また処理プロセッサによって管理される進行状態に基づいて、プラント機器に対して制御信号を出力するとともに、進行状態を表示する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の操作ステップを含む電子化手順に従ってプラント機器を制御するための自動制御システムであって、
前記複数の操作ステップ、前記複数の操作ステップの少なくとも一部について設定された開始条件、及び、前記プラント機器の動作状態を含むバッチデータを記憶するための記憶部と、
前記バッチデータに基づいて、前記プラント機器の動作状態が前記開始条件を満たしている場合に、前記開始条件に対応する前記操作ステップを実施するように、前記電子化手順の進行状態を管理する処理プロセッサと、
前記処理プロセッサによって管理される前記進行状態に基づいて、前記プラント機器に対して制御信号を出力するとともに、前記進行状態を表示するマンマシンプロセッサと、
を備える、自動制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記バッチデータは、
前記複数の操作ステップ、及び、前記開始条件を含む静的データと、
前記電子化手順の進行状態に応じて更新され、前記プラント機器の動作状態を含む動的データと
を含む、請求項1に記載の自動制御システム。
【請求項3】
前記複数の操作ステップの少なくとも一部は、前記操作ステップが実施不能な場合に実施可能な代替ステップが設定される、請求項1又は2に記載の自動制御システム。
【請求項4】
前記バッチデータは、前記電子化手順ごとに前記記憶部に記憶されており、
前記処理プロセッサは、前記マンマシンプロセッサによって指定された前記電子化手順に対応する前記バッチデータを前記記憶部から読み出す、請求項1又は2に記載の自動制御システム。
【請求項5】
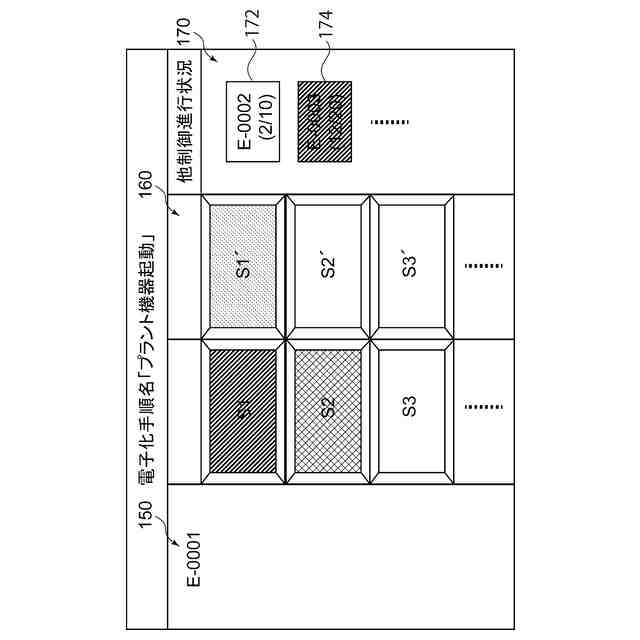
前記マンマシンプロセッサは、前記複数の操作ステップを前記進行状態に応じて区別可能な態様で表示する、請求項1又は2に記載の自動制御システム。
【請求項6】
前記マンマシンプロセッサは、並列に実行される前記電子化手順ごとに前記進行状態をそれぞれ表示可能に構成される、請求項1又は2に記載の自動制御システム。
【請求項7】
前記マンマシンプロセッサは、オペレータによって指定された前記電子化手順について、当該電子化手順に含まれる前記操作ステップごとに前記進行状態を詳細表示可能に構成される、請求項6に記載の自動制御システム。
【請求項8】
前記マンマシンプロセッサは、実施不能な前記操作ステップを区別可能な態様で表示する、請求項1又は2に記載の自動制御システム。
【請求項9】
前記処理プロセッサは、前記バッチデータに基づいて、前記電子化手順が実施可能であるか否かを事前診断する、請求項1又は2に記載の自動制御システム。
【請求項10】
複数の操作ステップを含む電子化手順に従ってプラント機器を制御するための自動制御システムであって、
前記複数の操作ステップ、及び、前記プラント機器の動作状態を含むバッチデータを記憶するための記憶部と、
前記バッチデータに基づいて、前記複数の操作ステップが実施可能であるか否かを事前診断するための処理プロセッサと、
前記処理プロセッサの診断結果に基づいて、前記プラント機器に対して制御信号を送信するためのマンマシンプロセッサと、
を備える、自動制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動制御システム、自動制御方法、及び、自動制御プログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
例えば発電プラントのようなプラント設備で用されるプラント機器は、多数の操作ステップからなる手順に従って運用される。従来、このようなプラント機器の運用手順は手順書としてまとめられており、膨大な数の操作ステップが含まれる。例えば特許文献1では、このような手順書を電子的データとして用意し、ディスプレイのようなコンピュータ画面上に表示することにより、オペレータは、当該表示された手順書に従って機器操作を実行可能なシステムが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2003-208251号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のように、オペレータが画面表示された手順書に基づいて人手により機器操作を行う場合、ヒューマンエラーが発生するおそれがある。特に手順書に含まれる操作ステップが膨大であったり、操作対象となるプラント機器が複雑なものになるほど、そのリスクは増大する。従来、このようなリスクを低減するために、オペレータや監督者を含むグループ体制でプラント機器の運用にあたっていたが、人員削減によるコスト低減やヒューマンエラー防止の観点から、手順書に従った一連の操作ステップを電子化手順として自動的に実施する、自動制御化が望まれている。この種の自動制御では、電子化手順に従って複数の操作ステップが順次実施されるが、その進行状態を適切に管理し、またオペレータに対して進行状態をわかりやすく把握できるようにすることが重要である。
【0005】
本開示の少なくとも一実施形態は上述の事情に鑑みなされたものであり、電子化手順に含まれる各操作ステップの進行状態を適切に管理しながら、オペレータに対してその進行状態を好適に認識させることが可能な自動制御システム、自動制御方法、及び、自動制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の少なくとも一実施形態に係る自動制御システムは、上記課題を解決するために、
複数の操作ステップを含む電子化手順に従ってプラント機器を制御するための自動制御システムであって、
前記複数の操作ステップ、前記複数の操作ステップの少なくとも一部について設定された開始条件、及び、前記プラント機器の動作状態を含むバッチデータを記憶するための記憶部と、
前記バッチデータに基づいて、前記プラント機器の動作状態が前記開始条件を満たしている場合に、前記開始条件に対応する前記操作ステップを実施するように、前記電子化手順の進行状態を管理する処理プロセッサと、
前記処理プロセッサによって管理される前記進行状態に基づいて、前記プラント機器に対して制御信号を出力するとともに、前記進行状態を表示するマンマシンプロセッサと、
を備える。
【0007】
本開示の少なくとも一実施形態に係る自動制御システムは、上記課題を解決するために、
複数の操作ステップを含む電子化手順に従ってプラント機器を制御するための自動制御システムであって、
前記複数の操作ステップ、及び、前記プラント機器の動作状態を含むバッチデータを記憶するための記憶部と、
前記バッチデータに基づいて、前記複数の操作ステップが実施可能であるか否かを事前診断するための処理プロセッサと、
前記処理プロセッサの診断結果に基づいて、前記プラント機器に対して制御信号を送信するためのマンマシンプロセッサと、
を備える。
【0008】
本開示の少なくとも一実施形態に係る自動制御方法は、上記課題を解決するために、
複数の操作ステップを含む電子化手順に従ってプラント機器を制御するための自動制御方法であって、
前記複数の操作ステップ、前記複数の操作ステップの少なくとも一部について設定された開始条件、及び、前記プラント機器の動作状態を含むバッチデータに基づいて、前記プラント機器の動作状態が前記開始条件を満たしている場合に、前記開始条件に対応する前記操作ステップを実施するように、前記電子化手順の進行状態を管理する工程と、
前記処理プロセッサによって管理される前記進行状態に基づいて、前記プラント機器に対して制御信号を出力するとともに、前記進行状態を表示する工程と、
を備える。
【0009】
本開示の少なくとも一実施形態に係る自動制御プログラムは、上記課題を解決するために、
複数の操作ステップを含む電子化手順に従ってプラント機器を制御するための自動制御プログラムであって、
コンピュータ装置に、
前記複数の操作ステップ、前記複数の操作ステップの少なくとも一部について設定された開始条件、及び、前記プラント機器の動作状態を含むバッチデータに基づいて、前記プラント機器の動作状態が前記開始条件を満たしている場合に、前記開始条件に対応する前記操作ステップを実施するように、前記電子化手順の進行状態を管理する工程と、
前記処理プロセッサによって管理される前記進行状態に基づいて、前記プラント機器に対して制御信号を出力するとともに、前記進行状態を表示する工程と、
を実行可能である。
【発明の効果】
【0010】
本開示の少なくとも一実施形態によれば、電子化手順に含まれる各操作ステップの進行状態を適切に管理しながら、オペレータに対してその進行状態を好適に認識させることが可能な自動制御システム、自動制御方法、及び、自動制御プログラムを提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
積水樹脂株式会社
磁性シート
22日前
個人
車両レバー操作装置
22日前
株式会社豊田自動織機
自動走行体
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社FUJI
工作機械
2か月前
エイブリック株式会社
基準電圧回路
29日前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
25日前
オムロン株式会社
自律作業システム
1か月前
株式会社熊谷組
巡回ルート作成装置
29日前
トヨタ自動車株式会社
搬送ロボット
1日前
トヨタ自動車株式会社
搬送システム
11日前
エイブリック株式会社
シャントレギュレータ
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ロボットシステム
11日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社栗本鐵工所
操作装置
2日前
株式会社デンソー
電子制御装置
1か月前
株式会社フカデン
外周部加工システム
2か月前
東芝ライテック株式会社
管理システム
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
11日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
株式会社デンソー
移動体制御装置
1か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
アズビル株式会社
診断システムおよび診断方法
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
1日前
株式会社豊田自動織機
無人走行体の走行制御システム
29日前
日立建機株式会社
自律走行システム
2か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
9日前
横河電機株式会社
モジュール
24日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































