TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024116917
公報種別
公開特許公報(A)
公開日
2024-08-28
出願番号
2023022792
出願日
2023-02-16
発明の名称
制御基板、及び対基板作業機
出願人
株式会社FUJI
代理人
弁理士法人ネクスト
,
個人
,
個人
主分類
H02P
5/46 20060101AFI20240821BHJP(電力の発電,変換,配電)
要約
【課題】対基板作業機の構成に応じた制御を対基板作業機に実行させることができる制御基板、及び対基板作業機を提供すること。
【解決手段】本開示の制御基板は、少なくとも1つのモータと、少なくとも1つの電源基板と、を備える対基板作業機に設けられる。対基板作業機は、制御基板の制御に基づいて、少なくとも1つのモータを制御可能である。電源基板は、制御基板が制御する少なくとも1つのモータに対応する電源として機能する。制御基板は、制御基板に接続された電源基板の電力値、及び制御基板に接続された電源基板の数のうち、少なくとも一方に基づいて、少なくとも1つのモータに対する対基板作業機の制御内容を変更する。
【選択図】図5
特許請求の範囲
【請求項1】
少なくとも1つのモータと、少なくとも1つの電源基板と、を備える対基板作業機に設けられる制御基板であって、
前記対基板作業機は、
前記制御基板の制御に基づいて、少なくとも1つの前記モータを制御可能であり、
前記電源基板は、
前記制御基板が制御する少なくとも1つの前記モータに対応する電源として機能し、
前記制御基板は、
前記制御基板に接続された前記電源基板の電力値、及び前記制御基板に接続された前記電源基板の数のうち、少なくとも一方に基づいて、少なくとも1つの前記モータに対する前記対基板作業機の制御内容を変更する、制御基板。
続きを表示(約 1,500 文字)
【請求項2】
前記対基板作業機は、
基板を搬送するレーンを少なくとも1つ備え、
少なくとも1つの前記モータは、
前記レーンに係る部材を動作させる駆動源として用いられ、
前記制御基板は、
前記制御基板に接続された前記電源基板の電力値、及び前記制御基板に接続された前記電源基板の数のうち、少なくとも一方に基づいて、前記対基板作業機が認識する前記レーンの数を変更することで、前記対基板作業機が制御する前記モータの数を前記レーンの数に応じて変更し、前記対基板作業機の制御内容を変更する、請求項1に記載の制御基板。
【請求項3】
前記電源基板は、
前記レーンの数と同一数だけ設けられ、
前記制御基板は、
前記電源基板を着脱可能に装着される電源用コネクタを複数備え、前記電源基板を接続された前記電源用コネクタの数を前記電源基板の数として取得し、取得した前記電源基板の数を前記レーンの数として前記対基板作業機に認識させる、請求項2に記載の制御基板。
【請求項4】
前記対基板作業機は、
前記モータと一対で設けられ、前記モータに電力を供給して駆動する駆動基板を備え、
前記制御基板は、
前記駆動基板を着脱可能に装着される駆動用コネクタを複数有し、前記駆動用コネクタに接続された前記駆動基板を介して前記モータを制御する、請求項1又は請求項2に記載の制御基板。
【請求項5】
前記制御基板は、
複数の前記駆動用コネクタのうち、前記駆動基板が接続された前記駆動用コネクタと前記駆動基板が接続されていない前記駆動用コネクタとが混在する状態において、前記駆動用コネクタに接続された前記駆動基板を介して前記モータを制御可能である、請求項4に記載の制御基板。
【請求項6】
前記モータは、
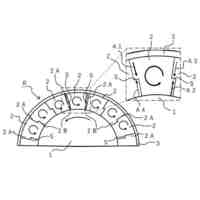
少なくとも3つ設けられ、基板を搬送するコンベアベルトを回転させる駆動源、前記コンベアベルトを支持する可動壁を移動させ前記基板を搬送するレーンの幅を変更する駆動源、及び前記基板をクランプして保持するための駆動源として用いられる、請求項4に記載の制御基板。
【請求項7】
前記対基板作業機は、
基板を搬送するレーンを少なくとも1つ備え、
前記制御基板は、
前記制御基板に接続された前記電源基板の電力値、及び前記制御基板に接続された前記電源基板の数のうち、少なくとも一方に基づいて、前記対基板作業機が認識する前記レーンの数を設定可能であり、複数の前記駆動用コネクタに接続された前記駆動基板の接続状態に基づいて、設定する前記レーンの数に必要な前記駆動基板及び前記モータが接続されているか否かを判断する、請求項4に記載の制御基板。
【請求項8】
少なくとも1つのモータと、
少なくとも1つの電源基板と、
制御基板と、
を備える対基板作業機であって、
前記対基板作業機は、
前記制御基板の制御に基づいて、少なくとも1つの前記モータを制御可能であり、
前記電源基板は、
前記制御基板が制御する少なくとも1つの前記モータに対応する電源として機能し、
前記制御基板は、
前記制御基板に接続された前記電源基板の電力値、及び前記制御基板に接続された前記電源基板の数のうち、少なくとも一方に基づいて、少なくとも1つの前記モータに対する前記対基板作業機の制御内容を変更する、対基板作業機。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータを制御する制御基板、及び制御基板を備える対基板作業機の技術に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、モータを駆動源として備え、モータを駆動して基板に対する作業を実行する対基板作業機について種々提案されている。下記特許文献1の電子部品実装機は、基板を搬送するレーン(回路基板搬送路)を2つ備えている。電子部品実装機は、レーンにおいて基板を搬送する基板搬送装置、レーンの幅の変更やレーンを搬送される基板のクランプを実行する基板クランプ装置、基板を下方から支持するバックアップピンを昇降させる基板昇降装置などを備えている。電子部品実装機は、上記した基板搬送装置などの各装置の駆動源としてモータを備えており、制御装置によって各モータを制御し、各装置の動作を制御している。
【先行技術文献】
【特許文献】
【0003】
特開2012-80003号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した電子部品実装機などの対基板作業機は、要求される生産能力や機能などに応じて、モータを駆動源とする装置の数やモータの数が変更される。一方で、対基板作業機の構成が変更された場合、例えば、異なるシリーズの対基板作業機であっても、共通の制御基板を用いることができれば、開発コストや製造コストの低減を図ることができる。しかしながら、共通の制御基板が使用できたとしても、対基板作業機の構成に合った設定を制御基板に対して手作業で行うと、設定ミスが発生する恐れがある。このため、対基板作業機側で装置の構成を検出できる技術が求められている。
【0005】
本開示は、そのような実情に鑑みてなされたものであり、対基板作業機の構成に応じた制御を対基板作業機に実行させることができる制御基板、及び対基板作業機を提供することを課題とする。
【課題を解決するための手段】
【0006】
本明細書は、少なくとも1つのモータと、少なくとも1つの電源基板と、を備える対基板作業機に設けられる制御基板であって、前記対基板作業機は、前記制御基板の制御に基づいて、少なくとも1つの前記モータを制御可能であり、前記電源基板は、前記制御基板が制御する少なくとも1つの前記モータに対応する電源として機能し、前記制御基板は、前記制御基板に接続された前記電源基板の電力値、及び前記制御基板に接続された前記電源基板の数のうち、少なくとも一方に基づいて、少なくとも1つの前記モータに対する前記対基板作業機の制御内容を変更する、制御基板を開示する。
【0007】
また、本明細書は、少なくとも1つのモータと、少なくとも1つの電源基板と、制御基板と、を備える対基板作業機であって、前記対基板作業機は、前記制御基板の制御に基づいて、少なくとも1つの前記モータを制御可能であり、前記電源基板は、前記制御基板が制御する少なくとも1つの前記モータに対応する電源として機能し、前記制御基板は、前記制御基板に接続された前記電源基板の電力値、及び前記制御基板に接続された前記電源基板の数のうち、少なくとも一方に基づいて、少なくとも1つの前記モータに対する前記対基板作業機の制御内容を変更する、対基板作業機を開示する。
【発明の効果】
【0008】
本開示の制御基板、対基板作業機によれば、制御基板に接続された電源基板の電力値、及び制御基板に接続された電源基板の数のうち、少なくとも一方に基づいて、モータに対する対基板作業機の制御内容を変更する。これにより、対基板作業機の電源の構成に応じた制御を対基板作業機に実行させることができる。
【図面の簡単な説明】
【0009】
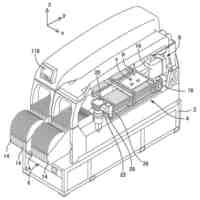
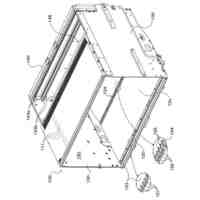
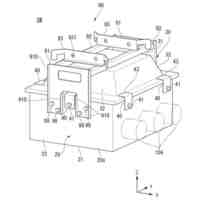
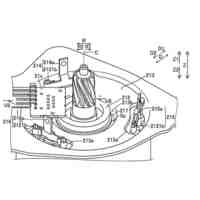
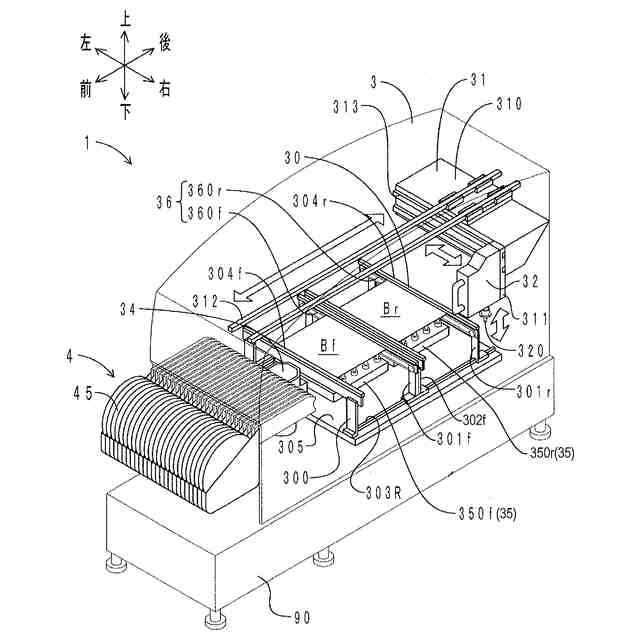
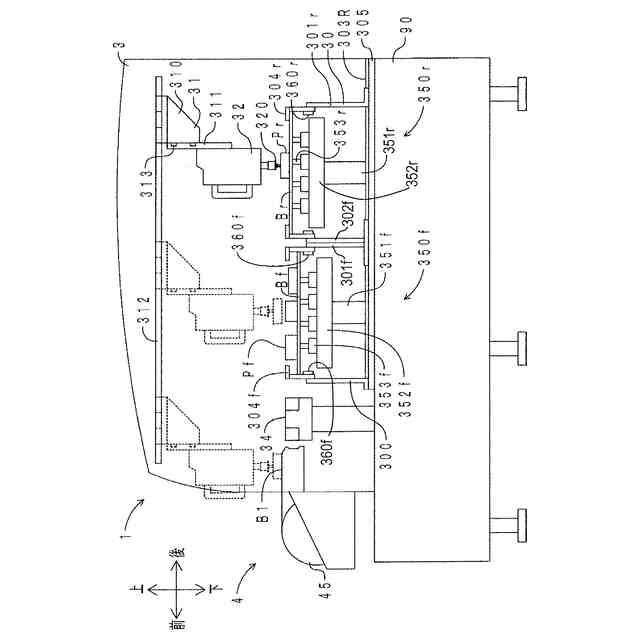
本実施例の電子部品実装機1の斜視図。
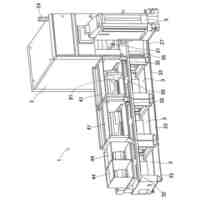
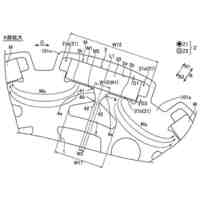
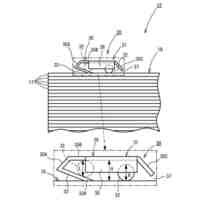
電子部品実装機1の上面図。
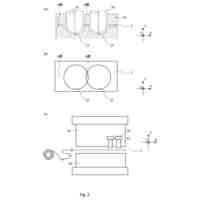
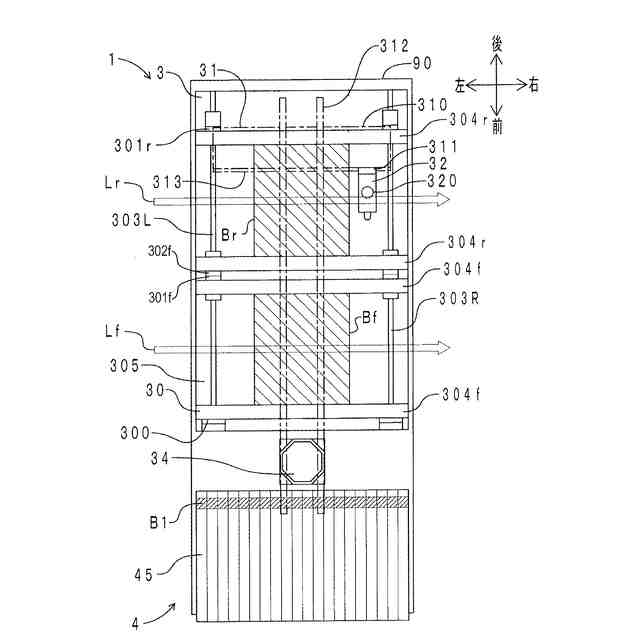
電子部品実装機1の右側面図。
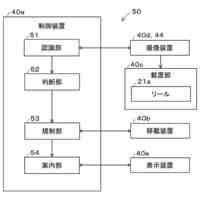
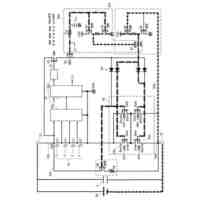
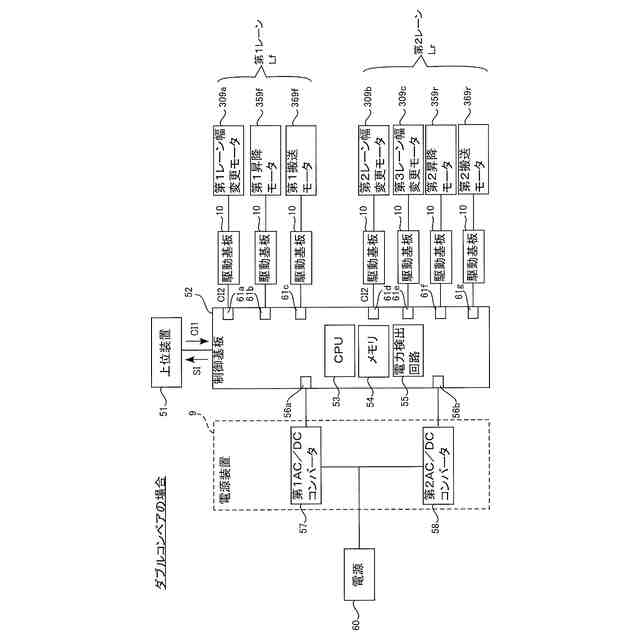
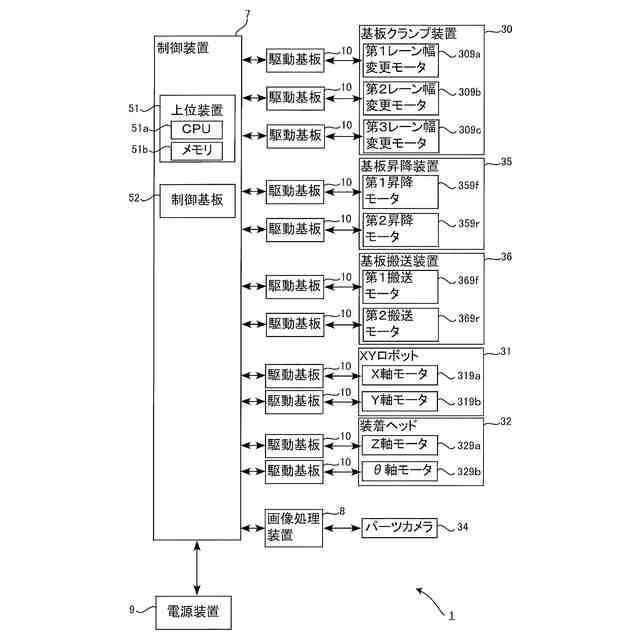
電子部品実装機1のブロック図。
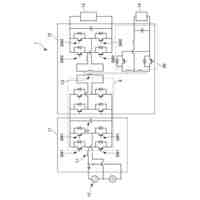
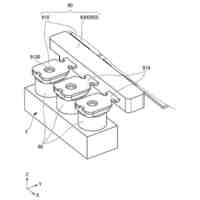
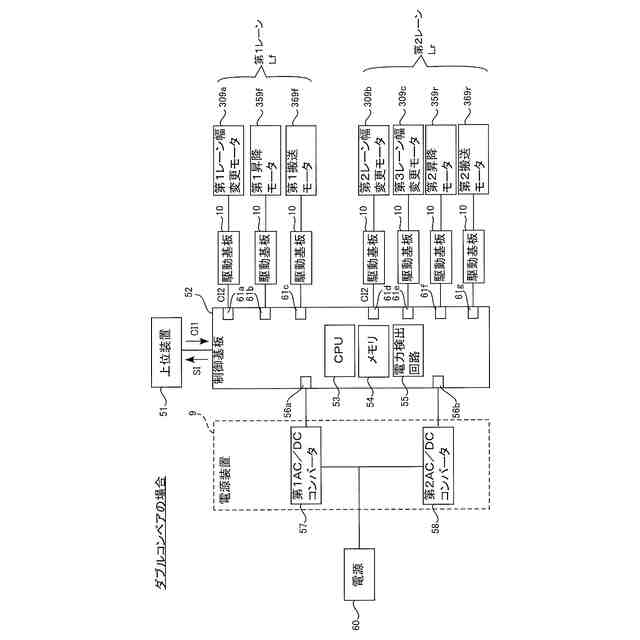
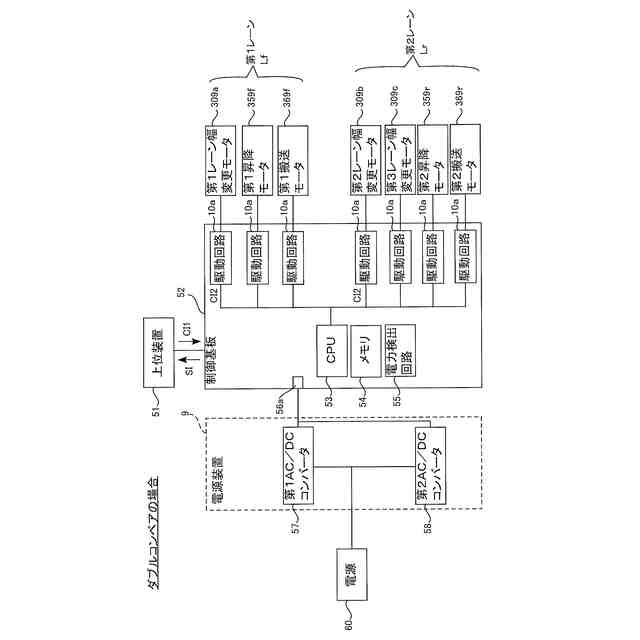
第1~第3レーン幅変更モータ309a~309c、第1及び第2昇降モータ359f,359r、第1及び第2搬送モータ369f,369rに係るブロック図であり、ダブルコンベアのブロック図。
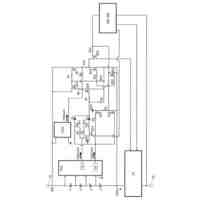
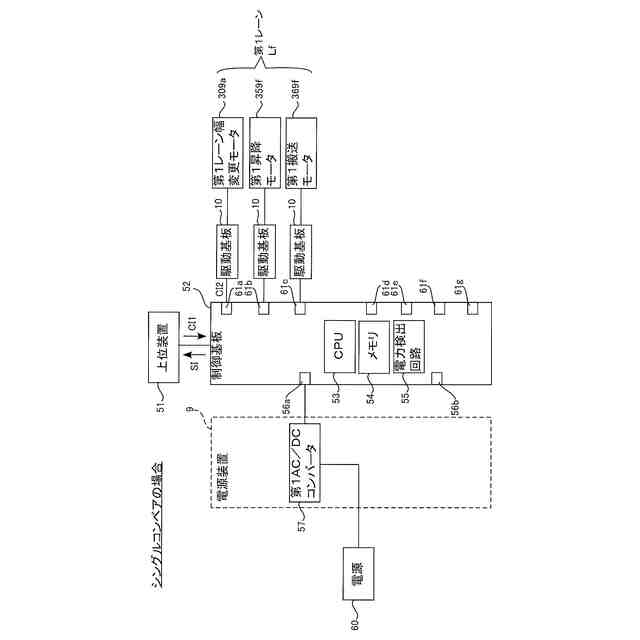
別実施例のシングルコンベアのブロック図。
別実施例のダブルコンベアのブロック図。
【発明を実施するための形態】
【0010】
以下、本開示の対基板作業機を具体化した一実施例である電子部品実装機を、図を参照しつつ詳しく説明する。まず、本実施例の電子部品実装機(以下、実装機という)1の機械的構成について説明する。以下の説明では、図1~図3に示すように、第1及び第2基板Bf,Brの搬送方向を左右方向と称して説明する。左側は、搬送方向の上流側である。また、実装機1を正面から見た方向を基準とし、搬送される第1及び第2基板Bf,Brの平面に平行で左右方向に垂直な方向を前後方向、左右方向及び前後方向の両方に垂直な方向を上下方向と称して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
装着機
1か月前
株式会社FUJI
ストッカ
11日前
株式会社FUJI
部品実装機
8日前
株式会社FUJI
部品実装システム
4日前
株式会社FUJI
自動化用パレット
1か月前
株式会社FUJI
洗浄方法及び造形装置
4日前
株式会社FUJI
排出方法及び造形装置
4日前
株式会社FUJI
算出方法および管理装置
11日前
株式会社FUJI
押圧装置、及び押圧方法
1か月前
株式会社FUJI
入庫支援装置および入庫支援方法
4日前
株式会社FUJI
磁極位置推定装置および磁極位置推定方法
5日前
株式会社FUJI
回路基板形成装置、および回路基板形成方法
1か月前
株式会社FUJI
装着機
1か月前
株式会社FUJI
演算装置
19日前
株式会社FUJI
部品実装機
1か月前
株式会社FUJI
装着作業システム
1か月前
株式会社FUJI
キッティング装置
1か月前
株式会社FUJI
部品実装システム
19日前
株式会社FUJI
部品実装システム
19日前
株式会社FUJI
対基板作業システム
1か月前
株式会社FUJI
部品供給ユニットの入出庫システム
1か月前
個人
インバーター
1か月前
個人
静電モータ
4日前
個人
通電確認器具
11日前
株式会社アイシン
制御装置
13日前
株式会社ExH
接触ユニット
8日前
株式会社GSユアサ
蓄電装置
20日前
株式会社GSユアサ
蓄電装置
20日前
株式会社東光高岳
開閉器
19日前
株式会社アイシン
ロータ
21日前
株式会社アイシン
車両用駆動装置
4日前
株式会社アイシン
モータ装置
21日前
トヨタ自動車株式会社
積層コア
4日前
株式会社豊田自動織機
回転電機のロータ
4日前
株式会社豊田自動織機
回転電機のロータ
11日前
日産自動車株式会社
ロータ
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ