TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010863
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2023113135
出願日
2023-07-10
発明の名称
磁極位置推定装置および磁極位置推定方法
出願人
株式会社FUJI
代理人
弁理士法人 共立特許事務所
主分類
H02P
6/16 20160101AFI20250116BHJP(電力の発電,変換,配電)
要約
【課題】可動子の磁極位置を推定可能な磁極位置推定装置および磁極位置推定方法を開示する。
【解決手段】磁極位置推定装置は、電圧指令設定部と、第一算出部と、第二算出部とを備える。電圧指令設定部は、電動機の界磁方向であるd軸方向の電圧指令であるd軸電圧指令を電圧指令値が異なるように複数設定する。第一算出部は、電圧指令設定部によって設定されたd軸電圧指令ごとに、d軸電圧指令に基づいてd軸方向の電圧であるd軸電圧を印加し、固定子に対して可動子を所定の振幅および周波数で振動して可動子の磁極位置を推定した仮磁極位置を算出する。第二算出部は、電圧指令設定部によって設定されたd軸電圧指令および第一算出部によって算出された仮磁極位置の関係に基づいて、可動子の磁極位置を推定した推定磁極位置を算出する。
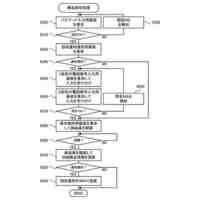
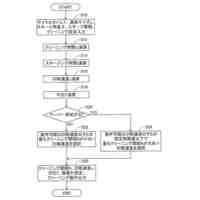
【選択図】図4
特許請求の範囲
【請求項1】
電動機の界磁方向であるd軸方向の電圧指令であるd軸電圧指令を電圧指令値が異なるように複数設定する電圧指令設定部と、
前記電圧指令設定部によって設定された前記d軸電圧指令ごとに、前記d軸電圧指令に基づいて前記d軸方向の電圧であるd軸電圧を印加し、固定子に対して可動子を所定の振幅および周波数で振動して前記可動子の磁極位置を推定した仮磁極位置を算出する第一算出部と、
前記電圧指令設定部によって設定された前記d軸電圧指令および前記第一算出部によって算出された前記仮磁極位置の関係に基づいて、前記可動子の磁極位置を推定した推定磁極位置を算出する第二算出部と、
を備える磁極位置推定装置。
続きを表示(約 980 文字)
【請求項2】
前記第一算出部は、前記固定子に対する前記可動子の位置を検出する位置センサの検出結果であって電気角の一周期における最大値と最小値を所定周期分、算出して、算出した前記所定周期分の前記最大値と前記最小値の平均値を前記仮磁極位置として算出する請求項1に記載の磁極位置推定装置。
【請求項3】
前記第二算出部は、前記d軸電圧指令および前記仮磁極位置の関係において、前記d軸電圧指令に対する前記仮磁極位置の近似曲線が定常値に漸近する所定関数を用いて、前記推定磁極位置を算出する請求項1または請求項2に記載の磁極位置推定装置。
【請求項4】
前記所定関数は、指数関数である請求項3に記載の磁極位置推定装置。
【請求項5】
前記所定関数は、分数関数である請求項3に記載の磁極位置推定装置。
【請求項6】
前記第二算出部は、最小二乗法によって前記推定磁極位置を算出する請求項3に記載の磁極位置推定装置。
【請求項7】
前記第一算出部は、外力が印加されている前記可動子の前記固定子に対する位置を検出する位置センサの検出結果を用いて、前記仮磁極位置を算出する請求項1に記載の磁極位置推定装置。
【請求項8】
前記外力は、重力である請求項7に記載の磁極位置推定装置。
【請求項9】
前記電動機は、鉛直方向に沿って延びるロボットアームを前記重力に抗して駆動する請求項8に記載の磁極位置推定装置。
【請求項10】
電動機の界磁方向であるd軸方向の電圧指令であるd軸電圧指令を電圧指令値が異なるように複数設定する電圧指令設定工程と、
前記電圧指令設定工程によって設定された前記d軸電圧指令ごとに、前記d軸電圧指令に基づいて前記d軸方向の電圧であるd軸電圧を印加し、固定子に対して可動子を所定の振幅および周波数で振動して前記可動子の磁極位置を推定した仮磁極位置を算出する第一算出工程と、
前記電圧指令設定工程によって設定された前記d軸電圧指令および前記第一算出工程によって算出された前記仮磁極位置の関係に基づいて、前記可動子の磁極位置を推定した推定磁極位置を算出する第二算出工程と、
を備える磁極位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、磁極位置推定装置および磁極位置推定方法に関する技術を開示する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載の磁極位置検出装置は、信号選択手段と、平均値演算手段と、相対磁極位置演算手段とを備えている。信号選択手段は、磁気検出素子部によって生成され、電気角で120度ずつ位相ずれした3つの磁気検出信号の大きさを比較して、最大の磁気検出信号にHのレベル信号、最小の磁気検出信号にはLのレベル信号を割り当てる。平均値演算手段は、Hのレベル信号とLのレベル信号が割り当てられた2つの磁気検出信号の平均値を演算して平均値信号を生成する。相対磁極位置演算手段は、平均値信号に基づいて所定の電気角の角度範囲内における相対磁極位置を演算する。
【0003】
特許文献2に記載の同期電動機の駆動装置は、同期電動機に高周波電圧を印加するための三相電圧指令信号を生成する指令電圧作成手段と、高周波電圧を印加した時に同期電動機に流れる電流を検出する電流検出手段と、電流検出結果に基づいて同期電動機の磁極位置を推定する磁極位置推定手段とを備えている。指令電圧作成手段は、第一の印加電圧モードと、第二の印加電圧モードと、第三の印加電圧モードを順次切り替えて三相電圧指令信号を生成する。第一の印加電圧モードは、任意の電圧振幅で、任意の位相に正と負に交番する高調波電圧を印加する。第二の印加電圧モードは、上記任意の位相から電気角で120度ずらした位相に同様の振幅の高周波電圧を印加する。第三の印加電圧モードは、上記任意の位相から電気角で240度ずらした位相に同様の振幅の高周波電圧を印加する。
【0004】
電流検出手段は、第一の印加電圧モード、第二の印加電圧モードおよび第三の印加電圧モードでの高周波電圧の印加により生じる脈動電流の正側値と負側値を、各モードで1相ずつ検出して、正側および負側の各相の電流値を検出する。磁極位置推定手段は、正側の各相の検出電流値、および、負側の各相の検出電流値を用いて、同期電動機の推定磁極位置を算出する。具体的には、同期電動機の駆動装置は、第一の印加電圧モード、第二の印加電圧モードおよび第三の印加電圧モードの各々で少なくとも1点以上検出した電流値を、各モードの検出点ごとに平均化処理する平均化処理手段を備えている。
【0005】
特許文献3に記載の磁気飽和特性演算部は、磁気飽和テーブル記憶部と、磁気飽和関数フィッティング部とを備えている。磁気飽和テーブル記憶部は、磁束推定部で算出された回数分の推定磁束量およびd軸電流最終値を記憶する。磁気飽和関数フィッティング部は、得られた推定磁束量およびd軸電流最終値を最小二乗法などで指数関数によりフィッティングする。
【先行技術文献】
【特許文献】
【0006】
特開2001-136776号公報
特開2011-050198号公報
特開2010-068627号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
位置センサを用いて電動機を制御する場合、可動子の磁極位置と、位置センサの位置関係を把握するために、可動子の磁極位置を推定する必要がある。
【0008】
このような事情に鑑みて、本明細書は、可動子の磁極位置を推定可能な磁極位置推定装置および磁極位置推定方法を開示する。
【課題を解決するための手段】
【0009】
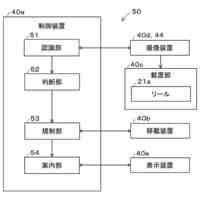
本明細書は、電圧指令設定部と、第一算出部と、第二算出部とを備える磁極位置推定装置を開示する。前記電圧指令設定部は、電動機の界磁方向であるd軸方向の電圧指令であるd軸電圧指令を電圧指令値が異なるように複数設定する。前記第一算出部は、前記電圧指令設定部によって設定された前記d軸電圧指令ごとに、前記d軸電圧指令に基づいて前記d軸方向の電圧であるd軸電圧を印加し、固定子に対して可動子を所定の振幅および周波数で振動して前記可動子の磁極位置を推定した仮磁極位置を算出する。前記第二算出部は、前記電圧指令設定部によって設定された前記d軸電圧指令および前記第一算出部によって算出された前記仮磁極位置の関係に基づいて、前記可動子の磁極位置を推定した推定磁極位置を算出する。
【0010】
また、本明細書は、電圧指令設定工程と、第一算出工程と、第二算出工程とを備える磁極位置推定方法を開示する。前記電圧指令設定工程は、電動機の界磁方向であるd軸方向の電圧指令であるd軸電圧指令を電圧指令値が異なるように複数設定する。前記第一算出工程は、前記電圧指令設定工程によって設定された前記d軸電圧指令ごとに、前記d軸電圧指令に基づいて前記d軸方向の電圧であるd軸電圧を印加し、固定子に対して可動子を所定の振幅および周波数で振動して前記可動子の磁極位置を推定した仮磁極位置を算出する。前記第二算出工程は、前記電圧指令設定工程によって設定された前記d軸電圧指令および前記第一算出工程によって算出された前記仮磁極位置の関係に基づいて、前記可動子の磁極位置を推定した推定磁極位置を算出する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
装着機
1か月前
株式会社FUJI
実装機
1か月前
株式会社FUJI
フィーダ
2か月前
株式会社FUJI
ストッカ
1か月前
株式会社FUJI
ストッカ
13日前
株式会社FUJI
工作機械
1日前
株式会社FUJI
部品実装機
10日前
株式会社FUJI
部品実装システム
6日前
株式会社FUJI
自動化用パレット
1か月前
株式会社FUJI
洗浄方法及び造形装置
6日前
株式会社FUJI
排出方法及び造形装置
6日前
株式会社FUJI
算出方法および管理装置
13日前
株式会社FUJI
押圧装置、及び押圧方法
1か月前
株式会社FUJI
ストッカおよびストッカシステム
1か月前
株式会社FUJI
入庫支援装置および入庫支援方法
6日前
株式会社FUJI
ダイ部品供給装置及びダイ部品供給方法
1か月前
株式会社FUJI
磁極位置推定装置および磁極位置推定方法
7日前
株式会社FUJI
回路基板形成装置、および回路基板形成方法
1か月前
株式会社FUJI
装着機
1か月前
株式会社FUJI
演算装置
21日前
株式会社FUJI
部品実装機
1か月前
株式会社FUJI
装着作業システム
1か月前
株式会社FUJI
キッティング装置
1か月前
株式会社FUJI
部品実装システム
今日
株式会社FUJI
部品実装システム
21日前
株式会社FUJI
部品実装システム
21日前
株式会社FUJI
対基板作業システム
1か月前
株式会社FUJI
印刷システム及び交換方法
今日
株式会社FUJI
部品供給ユニットの入出庫システム
1か月前
株式会社FUJI
印刷部材の個体管理システム及び個体管理方法並びに個体管理タグ付きの印刷機マスク
1か月前
個人
静電モータ
6日前
個人
通電確認器具
13日前
株式会社アイシン
制御装置
15日前
株式会社GSユアサ
蓄電装置
22日前
株式会社GSユアサ
蓄電装置
22日前
株式会社ExH
接触ユニット
10日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ