TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024115137
公報種別
公開特許公報(A)
公開日
2024-08-26
出願番号
2023020643
出願日
2023-02-14
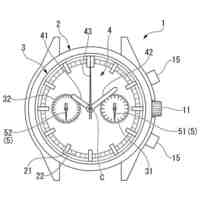
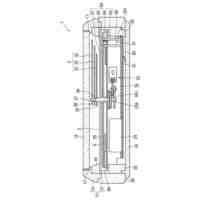
発明の名称
機械式時計
出願人
シチズン時計株式会社
代理人
弁理士法人はるか国際特許事務所
主分類
G04C
11/08 20060101AFI20240819BHJP(時計)
要約
【課題】歩度調整の精度を向上する機械式時計1を提供する。
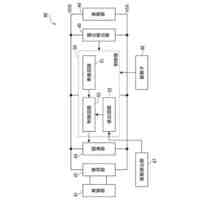
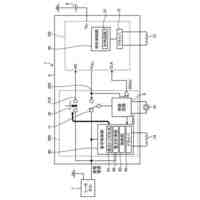
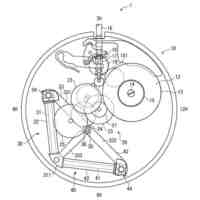
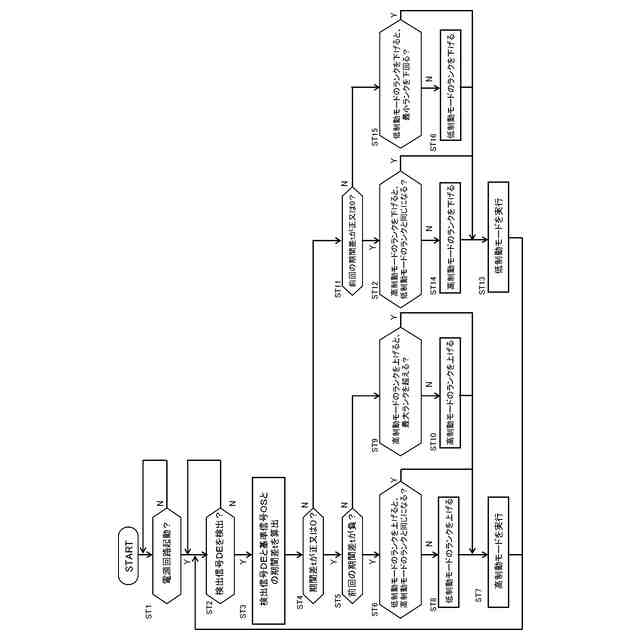
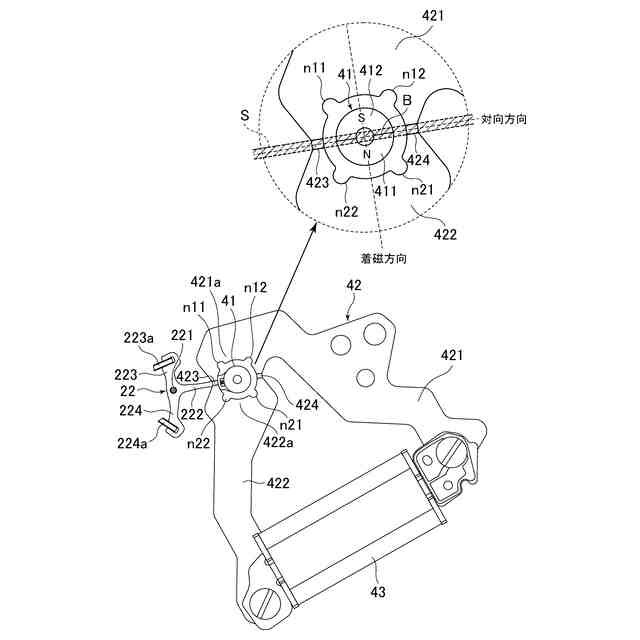
【解決手段】機械式時計1は、永久磁石40と、コイル43と、回転検出回路45と、複数の制動ランクそれぞれに対応する複数の制動力のうち現在設定されている制動ランクに対応する制動力を作用させる歩度調整手段40と、を含み、歩度調整手段40は、制動ランクを制御する制御回路44を含み、制御回路44は、所定の基準タイミングに対する検出信号DEの検出タイミングに応じて、制動ランクを切り替え可能に構成されており、回転検出回路45による前回の検出信号DEの検出時と今回の検出信号DEの検出時とで、基準タイミングに対する検出タイミングの進み又は遅れのいずれか一方が連続する場合よりも、基準タイミングに対する検出タイミングの進み又は遅れが異なる場合の方が、制動ランクの変動幅が大きくなるよう制動ランクを制御する。
【選択図】図12
特許請求の範囲
【請求項1】
動力源と、
前記動力源からの動力により駆動するテン輪と、前記テン輪を正逆回転運動させるように弾性変形するヒゲゼンマイと、を含む調速機構と、
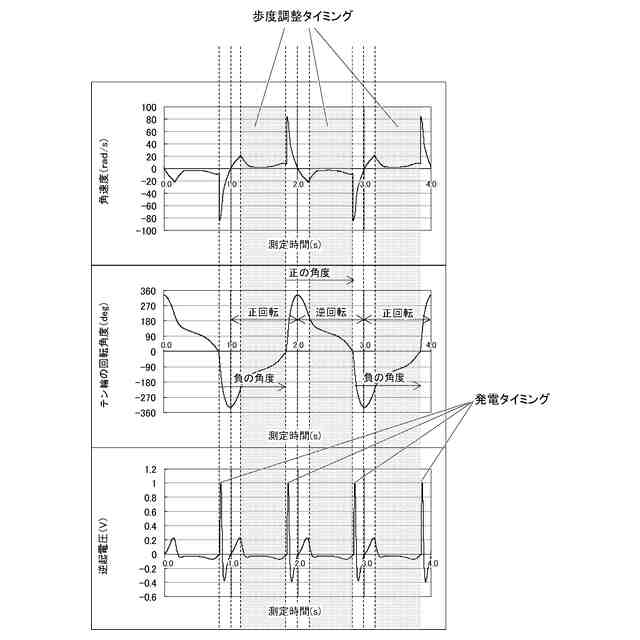
前記テン輪の正逆回転運動に伴い正逆回転運動する、二磁極化された永久磁石と、
コイルと、
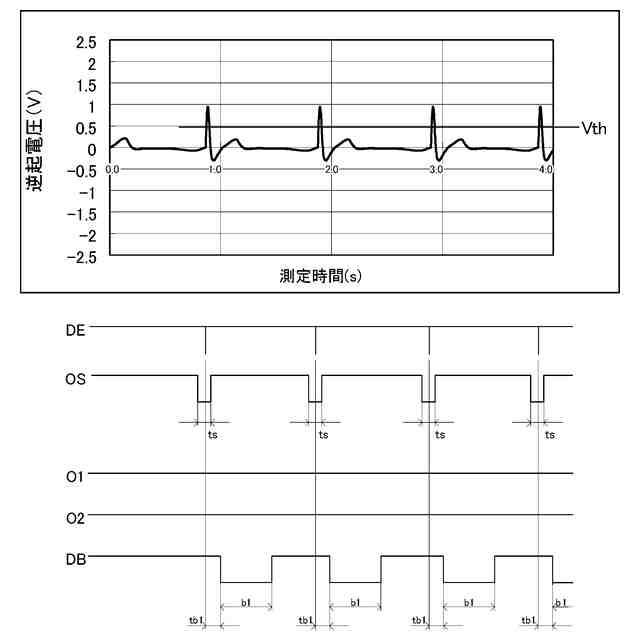
前記テン輪の正方向運動及び逆方向運動に伴う前記永久磁石の運動により前記コイルに生じる検出電圧に基づいて検出信号を検出する回転検出回路と、
前記永久磁石を制動する、複数の制動ランクそれぞれに対応する複数の制動力のうち現在設定されている制動ランクに対応する制動力を作用させる歩度調整手段と、
を含み、
前記歩度調整手段は、前記制動ランクを制御する制御回路を含み、
前記制御回路は、
基準信号源の基準信号の出力タイミングに応じた所定の基準タイミングに対する前記検出信号の検出タイミングに応じて、前記制動ランクを切り替え可能に構成されており、
前記回転検出回路による前回の前記検出信号の検出時と今回の前記検出信号の検出時とで、前記基準タイミングに対する前記検出タイミングの進み又は遅れのいずれか一方が連続する場合よりも、前記基準タイミングに対する前記検出タイミングの進み又は遅れが異なる場合の方が、前記制動ランクの変動幅が大きくなるよう前記制動ランクを制御する、
機械式時計。
続きを表示(約 1,600 文字)
【請求項2】
前記制御回路は、前記基準タイミングに対する前記検出タイミングに応じて、高制動モードと低制動モードとで制動モードを切り替え可能に構成されており、
前記高制動モードにおける現在の制動ランクは、前記低制動モードにおける現在の制動ランクよりも高い制動ランクに設定されている、
請求項1に記載の機械式時計。
【請求項3】
前記歩度調整手段は、前記コイルの端子を短絡させることで前記永久磁石を制動する制動力を作用させる制動回路を含む、
請求項2に記載の機械式時計。
【請求項4】
前記制動回路は、
前記回転検出回路による今回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが進んでいる場合、前記高制動モードにおける現在の制動ランクに対応する制動力を作用させ、
前記回転検出回路による今回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが遅れている場合、前記低制動モードにおける現在の制動ランクに対応する制動力を作用させる、
請求項3に記載の機械式時計。
【請求項5】
前記制御回路は、前記基準タイミングに対する前回の前記検出信号の検出タイミングに基づいて、前記高制動モード及び低制動モードにおける現在の制動ランクを設定する、
請求項4に記載の機械式時計。
【請求項6】
前記制御回路は、
前記回転検出回路による今回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが進んでいる場合であって、前記回転検出回路による前回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが遅れている場合、
前記低制動モードから前記高制動モードに切り替える、
請求項2に記載の機械式時計。
【請求項7】
前記制御回路は、前記低制動モードから前記高制動モードに切り替えると共に、前記低制動モードにおける現在の制動ランクを上げる、
請求項6に記載の機械式時計。
【請求項8】
前記制御回路は、
前記低制動モードにおける現在の制動ランクを上げた場合、制動ランクが上げられた後の前記低制動モードにおける現在の制動ランクが、前記高制動モードの現在の制動ランクと異なる場合、
前記低制動モードから前記高制動モードに切り替えると共に、前記低制動モードにおける現在の制動ランクを上げ、
前記低制動モードにおける現在の制動ランクを上げた場合、制動ランクが上げられた後の前記低制動モードにおける現在の制動ランクが、前記高制動モードの現在の制動ランクと同じになる場合、
前記低制動モードから前記高制動モードに切り替えると共に、前記低制動モードにおける制動ランクを維持させる、
請求項6に記載の機械式時計。
【請求項9】
前記制御回路は、
前記回転検出回路による今回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが進んでいる場合であって、前記回転検出回路による前回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが進んでいる場合、
前記高制動モードにおける現在の制動ランクを上げる、
請求項2に記載の機械式時計。
【請求項10】
前記制御回路は、
前記回転検出回路による今回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが遅れている場合であって、前記回転検出回路による前回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが進んでいる場合、
前記高制動モードから前記低制動モードに切り替える、
請求項2に記載の機械式時計。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、機械式時計に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1、2には、電磁的な制動力により時計の歩度の調整を行う技術が開示されている。このような技術により経時的に蓄積される歩度ズレを抑制することができる。
【先行技術文献】
【特許文献】
【0003】
特開2020-38206号公報
特開平11-166980号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、時計の姿勢の変化や外部からの衝撃があった場合において、短時間で歩度が大きくズレてしまうことがある。このような場合においても、歩度ズレの調整を迅速かつ精度良く行う要請がある。
【0005】
本発明は上記課題に鑑みてされたものであって、その目的は、歩度調整の精度を向上する機械式時計を提供することにある。
【課題を解決するための手段】
【0006】
(1)動力源と、前記動力源からの動力により駆動するテン輪と、前記テン輪を正逆回転運動させるように弾性変形するヒゲゼンマイと、を含む調速機構と、前記テン輪の正逆回転運動に伴い正逆回転運動する、二磁極化された永久磁石と、コイルと、前記テン輪の正方向運動及び逆方向運動に伴う前記永久磁石の運動により前記コイルに生じる検出電圧に基づいて検出信号を検出する回転検出回路と、前記永久磁石を制動する、複数の制動ランクそれぞれに対応する複数の制動力のうち現在設定されている制動ランクに対応する制動力を作用させる歩度調整手段と、を含み、前記歩度調整手段は、前記制動ランクを制御する制御回路を含み、前記制御回路は、基準信号源の基準信号の出力タイミングに応じた所定の基準タイミングに対する前記検出信号の検出タイミングに応じて、前記制動ランクを切り替え可能に構成されており、前記回転検出回路による前回の前記検出信号の検出時と今回の前記検出信号の検出時とで、前記基準タイミングに対する前記検出タイミングの進み又は遅れのいずれか一方が連続する場合よりも、前記基準タイミングに対する前記検出タイミングの進み又は遅れが異なる場合の方が、前記制動ランクの変動幅が大きくなるよう前記制動ランクを制御する、機械式時計。
【0007】
(2)(1)において、前記制御回路は、前記基準タイミングに対する前記検出タイミングに応じて、高制動モードと低制動モードとで制動モードを切り替え可能に構成されており、前記高制動モードにおける現在の制動ランクは、前記低制動モードにおける現在の制動ランクよりも高い制動ランクに設定されている、機械式時計。
【0008】
(3)(2)において、前記歩度調整手段は、前記コイルの端子を短絡させることで前記永久磁石を制動する制動力を作用させる制動回路を含む、機械式時計。
【0009】
(4)(3)において、前記制動回路は、前記回転検出回路による今回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが進んでいる場合、前記高制動モードにおける現在の制動ランクに対応する制動力を作用させ、前記回転検出回路による今回の前記検出信号の検出時において、前記基準タイミングに対して前記検出タイミングが遅れている場合、前記低制動モードにおける現在の制動ランクに対応する制動力を作用させる、機械式時計。
【0010】
(5)(3)または(4)において、前記制御回路は、前記基準タイミングに対する前回の前記検出信号の検出タイミングに基づいて、前記高制動モード及び低制動モードにおける現在の制動ランクを設定する、機械式時計。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
シチズン時計株式会社
ヒゲ玉
27日前
シチズン時計株式会社
光学装置
22日前
シチズン時計株式会社
撮影システム
22日前
シチズン時計株式会社
電鋳型の製造方法及び電鋳型
27日前
シチズン時計株式会社
判定装置、判定方法およびプログラム
22日前
シチズンファインデバイス株式会社
測長器
26日前
シチズン時計株式会社
脱進機構、機械式時計、機械式時計の製造方法
27日前
シチズンファインデバイス株式会社
液晶表示装置
22日前
シチズンファインデバイス株式会社
圧力検出装置
26日前
シチズン時計株式会社
判定装置、動画配信システム、判定方法及びプログラム
26日前
シチズンファインデバイス株式会社
液晶セル及びその製造方法
22日前
シチズンファインデバイス株式会社
ワークの製造方法及び保持具
27日前
シチズン時計株式会社
アブレーションカテーテル装置、アブレーションカテーテル、及び発熱体
27日前
シチズンファインデバイス株式会社
強誘電性液晶組成物および液晶表示素子
22日前
シチズンファインデバイス株式会社
加工物の製造方法、およびバリ除去装置
22日前
シチズン時計株式会社
三次元データ生成装置、三次元データ生成方法、三次元データ生成プログラム及び三次元データ生成システム
26日前
セイコーエプソン株式会社
時計
27日前
セイコーウオッチ株式会社
時計
1か月前
セイコーウオッチ株式会社
時計
1か月前
セイコーエプソン株式会社
電子時計
2か月前
セイコーエプソン株式会社
機械式時計
2か月前
セイコーエプソン株式会社
機械式時計
28日前
カシオ計算機株式会社
時計
1か月前
カシオ計算機株式会社
時計
1か月前
カシオ計算機株式会社
電子時計
1か月前
シチズン時計株式会社
電子時計
1か月前
セイコーエプソン株式会社
電子制御式機械時計
1か月前
セイコーエプソン株式会社
電子制御式機械時計
19日前
カシオ計算機株式会社
機器及び時計
1か月前
カシオ計算機株式会社
機器及び時計
1か月前
シチズン時計株式会社
ヒゲ玉
27日前
シチズン時計株式会社
機械式時計
1か月前
シチズン時計株式会社
機械式時計
2か月前
セイコーウオッチ株式会社
時計用文字板および時計
1か月前
ランゲ ウーレン ゲーエムベーハー
ゼロ設定装置
1か月前
セイコーエプソン株式会社
回転ベゼル構造及び時計
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ