TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024104179
公報種別
公開特許公報(A)
公開日
2024-08-02
出願番号
2023008277
出願日
2023-01-23
発明の名称
回転量推定装置、回転量推定方法、及びモータ制御装置
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
H02P
7/06 20060101AFI20240726BHJP(電力の発電,変換,配電)
要約
【課題】ブラシ付き直流モータが制動運転状態を経て停止する際に、制動運転中の回転量を高い精度で推定することが可能な回転量推定装置を提供する。
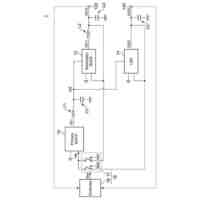
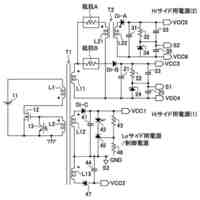
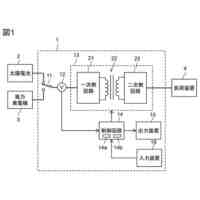
【解決手段】回転量推定装置11は、直流モータ40の両端に同電位が印加されることで、直流モータ40が制動運転を行うとき、その同電位を印加するための回路を介して直流モータ40に流れる誘導電流の減衰特性曲線を算出する。そして、回転量推定装置11は、
制動運転の開始から、直流モータ40が停止するまでの時間に渡って、減衰特性曲線に従い誘導電流を積分した誘導電流積分値を算出する。誘導電流積分値は、直流モータ40の制動運転中の回転量に対応する値となるので、誘導電流積分値に基づいて、直流モータ40の制動運転中の回転量を推定することができる。
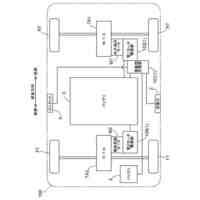
【選択図】図1
特許請求の範囲
【請求項1】
ブラシ付き直流モータ(40)の制動運転中の回転量を推定する回転量推定装置(11)であって、
前記直流モータの駆動電流の通電が停止され、かつ、前記直流モータの両端に同電位が印加されることにより、前記直流モータの制動運転を経て、前記直流モータの回転が停止する際に、前記直流モータの制動運転中に前記直流モータを流れる誘導電流に基づいて、前記制動運転の開始から前記直流モータの回転停止までの前記誘導電流が減衰する特性を示す減衰特性曲線を推定する減衰特性曲線推定部(12)と、
前記制動運転の開始から前記直流モータの回転停止までに要する時間を推定する時間推定部(14)と、
前記減衰特性曲線推定部によって推定された前記誘導電流の前記減衰特性曲線に従い、前記時間推定部によって推定された時間に渡って、前記誘導電流を積分した積分値に基づいて、前記直流モータの制動運転中の回転量を推定する回転量推定部(17)と、を備える回転量推定装置。
続きを表示(約 2,000 文字)
【請求項2】
前記減衰特性曲線推定部は、前記直流モータの制動運転中における、少なくとも3点の前記誘導電流の値と、前記少なくとも3点の誘導電流の値が得られた時間とに基づいて、前記減衰特性曲線を導出する請求項1に記載の回転量推定装置。
【請求項3】
前記減衰特性曲線推定部が導出する前記減衰特性曲線は、2次関数曲線である、請求項2に記載の回転量推定装置。
【請求項4】
前記減衰特性曲線推定部は、前記誘導電流がピーク値となった以降に、前記少なくとも3点の誘導電流の値と、前記少なくとも3点の誘導電流の値が得られた時間とを取得する請求項2又は3に記載の回転量推定装置。
【請求項5】
前記減衰特性曲線推定部は、前記少なくとも3点の誘導電流の値と、前記少なくとも3点の誘導電流の値が得られた時間との取得を、前記誘導電流が零となる以前に完了する請求項2又は3に記載の回転量推定装置。
【請求項6】
前記時間推定部は、前記制動運転の開始から前記直流モータの回転停止までに要する時間を、前記減衰特性曲線推定部によって推定された前記減衰特性曲線から求める請求項5に記載の回転量推定装置。
【請求項7】
前記直流モータに駆動電流が通電されて前記直流モータが回転駆動されているときに、前記直流モータに流れる電流波形に基づいて、前記直流モータの回転速度を演算する回転速度演算部(16)を、さらに備え、
前記回転量推定部(17)は、
前記回転速度演算部によって演算される前記直流モータの回転速度に基づいて推定される、前記直流モータの制動運転が開始された時点の前記直流モータの回転速度と、前記制動運転の開始から前記直流モータの回転停止までに要する時間との積を基準回転量として算出する基準回転量算出部(S180)と、
前記減衰特性曲線から推定される、前記直流モータの制動運転が開始されたときの前記誘導電流の値と、前記制動運転の開始から前記直流モータの回転停止までに要する時間との積を基準積分値として算出する基準積分値算出部(S190)と、を有し、
前記基準回転量に、前記基準積分値に対する前記積分値の比を乗じることによって、前記直流モータの制動運転中の回転量を算出する請求項1乃至3のいずれか1項に記載の回転量推定装置。
【請求項8】
請求項1乃至3のいずれか1項に記載の回転量推定装置(11)と、
前記直流モータに流れる電流波形に基づいて演算される、前記直流モータの駆動電流の通電が停止されるまでの前記直流モータの回転量に、前記回転量推定装置によって推定された前記直流モータの制動運転中の回転量を加味して、前記直流モータが停止した際の回転量を検出するモータ回転量検出部(18、19)と、
前記モータ回転量検出部によって検出される前記直流モータの回転量に基づいて、前記直流モータへの駆動電流の通電を制御する制御部(20)と、を備えるモータ制御装置。
【請求項9】
前記直流モータは、車両のウインドウを開閉するモータとして用いられ、
前記制御部は、前記ウインドウを閉じている途中で、前記ウインドウによる挟み込みが発生した場合、前記直流モータを停止又は逆転させる挟み込み防止制御を実行するものであり、前記モータ回転量検出部によって検出される前記直流モータの回転量に基づいて、前記ウインドウが閉じられる位置まで所定の距離に達したと判定されると、前記挟み込み防止制御を停止させる請求項8に記載のモータ制御装置。
【請求項10】
少なくとも1つのプロセッサによって実行される、ブラシ付き直流モータ(40)の制動運転中の回転量を推定する回転量推定方法であって、
前記直流モータの駆動電流の通電が停止され、かつ、前記直流モータの両端に同電位が印加されることにより、前記直流モータの制動運転を経て、前記直流モータの回転が停止する際に、前記直流モータの制動運転中に前記直流モータを流れる誘導電流に基づいて、前記制動運転の開始から前記直流モータの回転停止までの前記誘導電流が減衰する特性を示す減衰特性曲線を推定する減衰特性曲線推定ステップ(12)と、
前記制動運転の開始から前記直流モータの回転停止までに要する時間を推定する時間推定ステップ(14)と、
前記減衰特性曲線推定ステップにおいて推定された前記誘導電流の前記減衰特性曲線に従い、前記時間推定ステップにおいて推定された時間に渡って、前記誘導電流を積分した積分値に基づいて、前記直流モータの制動運転中の回転量を推定する回転量推定ステップと(17)、を備える回転量推定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ブラシ付き直流モータが制動運転される間の回転量を推定する回転量推定装置及び回転量推定方法、並びに回転量推定装置を備えるモータ制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば特許文献1には、ブラシを有する直流モータに流れる電流、又は該モータの端子間電圧などのモータ駆動波形に基づき、モータの回転情報を検出する装置が開示されている。
【0003】
特許文献1に記載の装置では、検出されたモータ電流の波形から、リップル成分のパルス信号を生成する。このパルス信号に基づいて、モータの回転量が推定される。また、モータ端子間電圧と、検出されたモータ電流とから、逆起電圧が推定される。そして、逆起電圧に対して、上記パルス信号のパルス周期ごとに積分演算を行い、モータの回転量を示す積分値を得る。この積分値に基づいて、推定されたモータの回転量が補正される。
【先行技術文献】
【特許文献】
【0004】
特開2005-323488号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の装置では、モータを停止させる場合、モータの両端を接地電位に接続することにより、モータを定常運転状態から制動運転状態に切り替えている。しかし、モータを制動運転状態に切り替えた場合、モータの両端はともに同じ接地電位となる。このため、正しいモータ端子間電圧を検出することが困難となり、その結果、モータ端子間電圧と、検出されたモータ電流とから、逆起電圧を正確に推定することも困難になる。
【0006】
また、特許文献1に記載の装置では、逆起電力の積分が、パルス信号のパルス周期ごとに繰り返される。しかし、制動運転状態では、回転速度が低下してリップル成分も小さくなるため、パルス信号のパルス周期を正確に得ることも困難になる。このため、逆起電力の積分を正しく行い得ない可能性がある。
【0007】
これらの理由から、制動運転状態において、逆起電力を用いて、モータの正確な回転量を得ることは非常に困難になる。
【0008】
本開示は、上述した点に鑑みてなされたものであり、ブラシ付き直流モータが制動運転状態を経て停止する際に、制動運転中の回転量を高い精度で推定することが可能な回転量推定装置及び回転量推定方法、並びに当該回転量推定装置を備えるモータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本開示による回転量推定装置(11)は、ブラシ付き直流モータ(40)の制動運転中の回転量を推定する装置であって、
直流モータの駆動電流の通電が停止され、かつ、直流モータの両端に同電位が印加されることにより、直流モータの制動運転を経て、直流モータの回転が停止する際に、直流モータの制動運転中に直流モータを流れる誘導電流に基づいて、制動運転の開始から直流モータの回転停止までの誘導電流が減衰する特性を示す減衰特性曲線を推定する減衰特性曲線推定部(12)と、
制動運転の開始から直流モータの回転停止までに要する時間を推定する時間推定部(14)と、
減衰特性曲線推定部によって推定された誘導電流の前記減衰特性曲線に従い、時間推定部によって推定された時間に渡って、誘導電流を積分した積分値に基づいて、直流モータの制動運転中の回転量を推定する回転量推定部(17)と、を備えることを特徴とする。
【0010】
また、本開示による回転量推定方法は、少なくとも1つのプロセッサによって実行される、ブラシ付き直流モータ(40)の制動運転中の回転量を推定する方法であって、
直流モータの駆動電流の通電が停止され、かつ、直流モータの両端に同電位が印加されることにより、直流モータの制動運転を経て、直流モータの回転が停止する際に、直流モータの制動運転中に直流モータを流れる誘導電流に基づいて、制動運転の開始から直流モータの回転停止までの誘導電流が減衰する特性を示す減衰特性曲線を推定する減衰特性曲線推定ステップ(12)と、
制動運転の開始から直流モータの回転停止までに要する時間を推定する時間推定ステップ(14)と、
減衰特性曲線推定ステップにおいて推定された誘導電流の減衰特性曲線に従い、時間推定ステップにおいて推定された時間に渡って、誘導電流を積分した積分値に基づいて、直流モータの制動運転中の回転量を推定する回転量推定ステップ(17)と、を備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社発明屋
光起電システム
7日前
個人
配電盤設置方法
13日前
ニデック株式会社
ステータ
7日前
株式会社発明ラボックス
蓄電電池
18日前
株式会社アイシン
回転電機
15日前
三菱電機株式会社
駆動回路
4日前
中国電力株式会社
接地線穴カバー
13日前
ローム株式会社
複合電源回路
11日前
住友電装株式会社
ブラケット
6日前
三菱電機モビリティ株式会社
電力変換装置
4日前
新電元工業株式会社
電源装置
12日前
株式会社カネカ
独立システム
12日前
新電元工業株式会社
絶縁電源
12日前
株式会社アイドゥス企画
連結ドラムモータ
11日前
オムロン株式会社
電力変換装置
4日前
トヨタ自動車株式会社
電動車両
15日前
株式会社ダイヘン
電力供給装置
5日前
株式会社ダイヘン
電力変換装置
5日前
富士電機株式会社
電力変換装置
12日前
株式会社デンソー
リニアモータ
7日前
エイブリック株式会社
DC-DCコンバータ
15日前
株式会社NTTドコモ
中継装置
18日前
株式会社豊田自動織機
電子機器
7日前
株式会社豊田自動織機
回転電機
18日前
株式会社東光通商
熱電発電装置
11日前
未来工業株式会社
配線ボックス
15日前
株式会社NTTドコモ
中継装置
18日前
株式会社アイシン
ステータ
15日前
株式会社豊田自動織機
電動圧縮機
13日前
株式会社村田製作所
電力制御装置
18日前
国立大学法人 長崎大学
発電装置
18日前
株式会社アイシン
電源装置
12日前
ミネベアミツミ株式会社
ステータ組立体
4日前
日本精工株式会社
接続装置
13日前
ミツミ電機株式会社
直流電源装置
12日前
株式会社豊田自動織機
電力変換装置
12日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ