TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024102622
公報種別
公開特許公報(A)
公開日
2024-07-31
出願番号
2023006633
出願日
2023-01-19
発明の名称
操作装置
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/24 20060101AFI20240724BHJP(水工;基礎;土砂の移送)
要約
【課題】操作部の操作反力を、状況に応じた適切な大きさに調整する。
【解決手段】第二操作反力制御部(62)には、第一操作部(31)が操作者に操作されていると第二操作反力制御部(62)が判定したことを含む条件である第二操作反力増加条件が設定される。第二操作反力制御部(62)は、第二操作反力増加条件が満たされる場合の第二操作反力(F2a)を、第二操作反力増加条件が満たされない場合の第二操作反力(F2b)よりも大きくする場合がある。第二操作反力制御部(62)は、第二操作部(32)の操作速度(V2)が大きくなるにしたがって、第二操作反力増加条件がみたされる場合の第二操作反力(F2a)を大きくする。
【選択図】図4
特許請求の範囲
【請求項1】
走行可能な走行体と、作業を行うアタッチメントと、を備える作業機械を操作するための操作装置であって、
操作者に操作され、前記走行体および前記アタッチメントのうち一方を操作するための第一操作部と、
前記操作者に操作され、前記走行体および前記アタッチメントのうち前記第一操作部に操作される方とは異なる方を操作するための第二操作部と、
前記第二操作部に加えられる操作力に対する反力である第二操作反力を制御する第二操作反力制御部と、
を備え、
前記第二操作反力制御部には、前記第一操作部が前記操作者に操作されていると前記第二操作反力制御部が判定したことを含む条件である第二操作反力増加条件が設定され、
前記第二操作反力制御部は、前記第二操作反力増加条件が満たされる場合の前記第二操作反力を、前記第二操作反力増加条件が満たされない場合の前記第二操作反力よりも大きくする場合があり、
前記第二操作反力制御部は、前記第二操作部の操作速度が大きくなるにしたがって、前記第二操作反力増加条件が満たされる場合の前記第二操作反力を大きくする、
操作装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の操作装置であって、
前記第二操作反力増加条件は、前記第二操作部が前記操作者に操作されていないと前記第二操作反力制御部が判定したことをさらに含む、
操作装置。
【請求項3】
請求項2に記載の操作装置であって、
前記第二操作部を支持する操作部支持部を備え、
前記第二操作反力制御部は、前記操作部支持部の加速度を取得し、取得した前記加速度に基づいて前記操作部支持部の揺れの度合いを算出し、
前記第二操作反力制御部は、前記揺れの度合いが大きくなるにしたがって、前記第二操作反力増加条件が満たされる場合の前記第二操作反力を大きくする、
操作装置。
【請求項4】
請求項1に記載の操作装置であって、
前記第一操作部に加えられる操作力に対する操作反力である第一操作反力を制御する第一操作反力制御部を備え、
前記第一操作反力制御部には、前記第一操作部が前記操作者に操作されていると前記第一操作反力制御部が判定したことを含む条件である第一操作反力増加条件が設定され、
前記第一操作反力制御部は、前記第一操作反力増加条件が満たされる場合の前記第一操作反力を、前記第一操作反力増加条件が満たされない場合の前記第一操作反力よりも大きくする場合があり、
前記第一操作反力制御部は、前記第一操作部の操作速度が大きくなるにしたがって、前記第一操作反力増加条件が満たされる場合の前記第一操作反力を大きくする、
操作装置。
【請求項5】
請求項4に記載の操作装置であって、
前記第一操作部を支持する操作部支持部を備え、
前記第一操作反力制御部は、前記操作部支持部の加速度を取得し、取得した前記加速度に基づいて前記操作部支持部の揺れの度合いを算出し、
前記第一操作反力制御部は、前記揺れの度合いが大きくなるにしたがって、前記第一操作反力増加条件が満たされる場合の前記第一操作反力を大きくする、
操作装置。
【請求項6】
請求項1に記載の操作装置であって、
前記第二操作反力制御部は、前記作業機械の動作制限が行われることが決定されたときに、前記動作制限が行われることが決定されていないときに比べ、前記第二操作反力を大きくする場合がある、
操作装置。
【請求項7】
請求項1に記載の操作装置であって、
前記第一操作部に加えられる操作力に対する操作反力である第一操作反力を制御する第一操作反力制御部を備え、
前記第一操作反力制御部は、前記作業機械の動作制限が行われることが決定されたときに、前記動作制限が行われることが決定されていないときに比べ、前記第一操作反力を大きくする場合がある、
操作装置。
【請求項8】
請求項1~7のいずれか1項に記載の操作装置であって、
前記第一操作部は、前記走行体を操作するための走行操作部であり、
前記第二操作部は、前記アタッチメントを操作するための作業操作部である、
操作装置。
【請求項9】
請求項1~7のいずれか1項に記載の操作装置であって、
前記第一操作部は、前記アタッチメントを操作するための作業操作部であり、
前記第二操作部は、前記走行体を操作するための走行操作部である、
操作装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械を操作するための操作装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
例えば特許文献1に、操作部(同文献ではフロント操作レバー)の操作反力を増大させる技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-248867号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
操作部の操作反力を、状況に応じた適切な大きさに調整することが望まれている。
【0005】
本発明の目的は、操作部の操作反力を、状況に応じた適切な大きさに調整できる操作装置を提供することである。
【課題を解決するための手段】
【0006】
操作装置は、作業機械を操作するためのものである。前記作業機械は、走行可能な走行体と、作業を行うアタッチメントと、を備える。操作装置は、第一操作部と、第二操作部と、第二操作反力制御部と、を備える。前記第一操作部は、操作者に操作され、前記走行体および前記アタッチメントのうち一方を操作するためのものである。前記第二操作部は、前記操作者に操作され、前記走行体および前記アタッチメントのうち前記第一操作部に操作される方とは異なる方を操作するためのものである。前記第二操作反力制御部は、前記第二操作部に加えられる操作力に対する反力である第二操作反力を制御する。前記第二操作反力制御部には、第二操作反力増加条件が設定される。前記第二操作反力増加条件は、前記第一操作部が前記操作者に操作されていると前記第二操作反力制御部が判定したことを含む条件である。前記第二操作反力制御部は、前記第二操作反力増加条件が満たされる場合の前記第二操作反力を、前記第二操作反力増加条件が満たされない場合の前記第二操作反力よりも大きくする場合がある。前記第二操作反力制御部は、前記第二操作部の操作速度が大きくなるにしたがって、前記第二操作反力増加条件が満たされる場合の前記第二操作反力を大きくする。
【発明の効果】
【0007】
上記の操作装置は、操作部の操作反力を、状況に応じた適切な大きさに調整できる。
【図面の簡単な説明】
【0008】
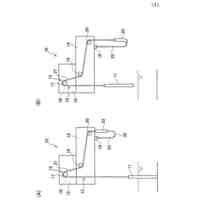
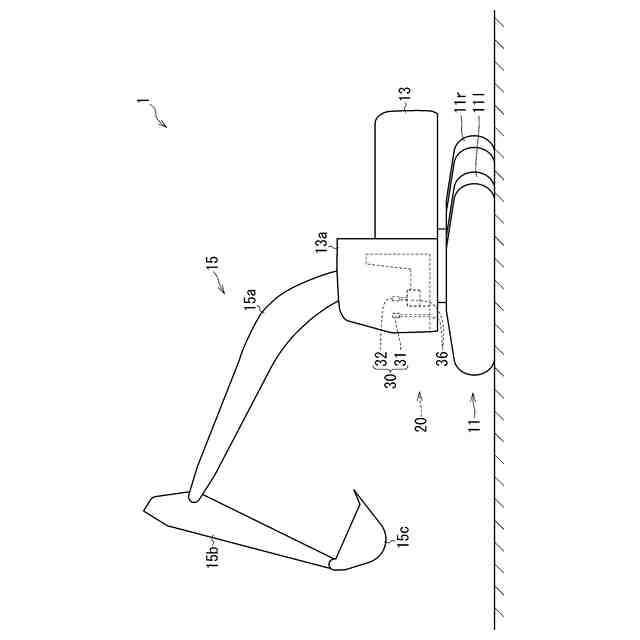
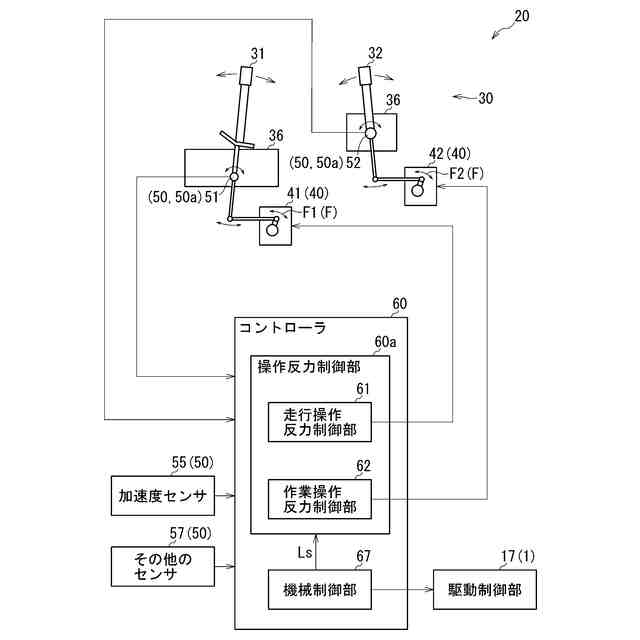
操作装置20、および操作装置20に操作される作業機械1を横から見た図である。
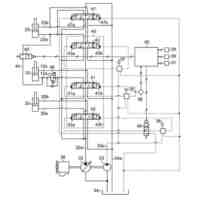
図1に示す操作装置20のブロック図である。
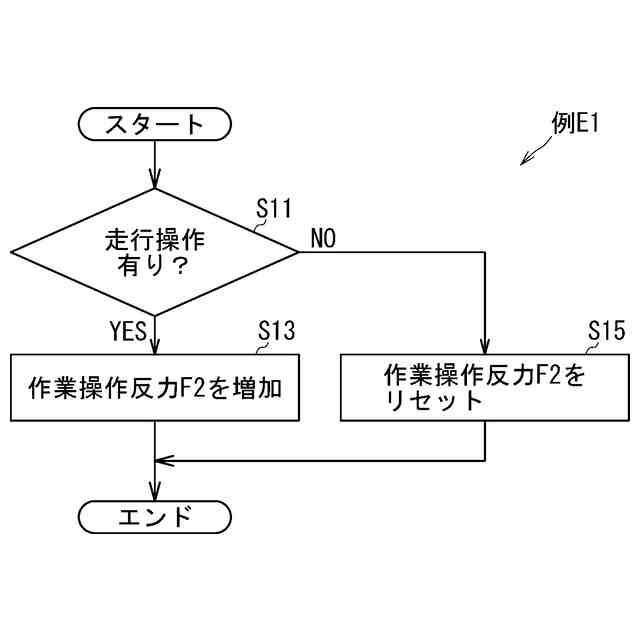
図2に示す操作反力制御部60aの制御の例E1のフローチャートである。
図3に示す制御の例E1における作業操作速度V2と作業操作反力F2との関係を表すグラフである。
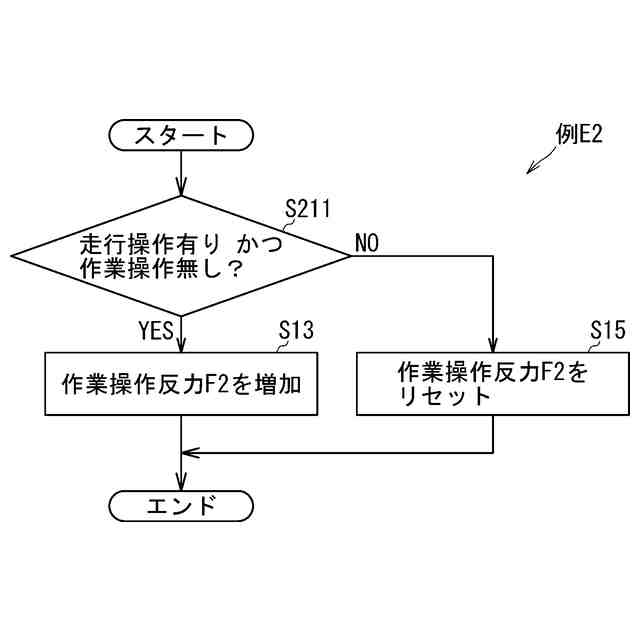
図2に示す操作反力制御部60aの制御の例E2のフローチャートである。
図5に示す制御の例E2における作業操作速度V2と作業操作反力F2との関係を表すグラフである。
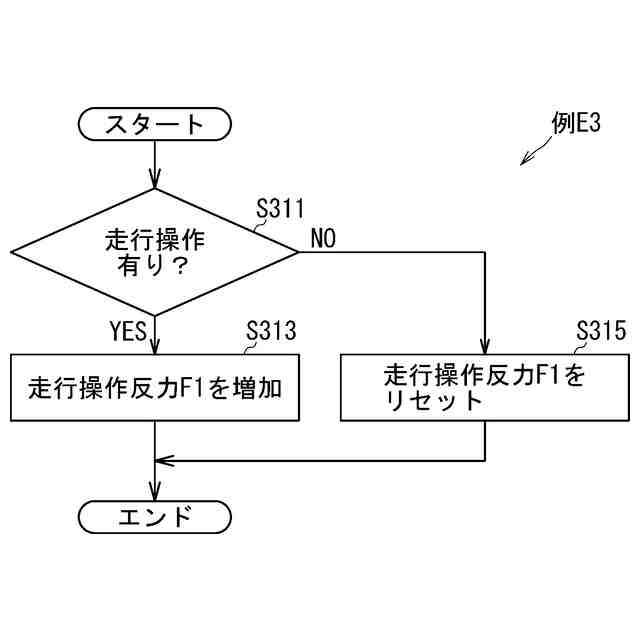
図2に示す操作反力制御部60aの制御の例E3のフローチャートである。
図7に示す制御の例E3における走行操作速度V1と走行操作反力F1との関係を表すグラフである。
図2に示す操作反力制御部60aの制御の例E4のフローチャートである。
図9に示す制御の例E4における走行操作速度V1と走行操作反力F1との関係を表すグラフである。
図2に示す操作反力制御部60aの制御の例E5のフローチャートである。
図11に示す制御の例E5における操作速度Vと操作反力Fとの関係を表すグラフである。
【発明を実施するための形態】
【0009】
図1~図12を参照して、図1に示す作業機械1に用いられる操作装置20について説明する。
【0010】
作業機械1は、作業を行う機械であり、例えば建設作業を行う建設機械であり、例えばショベルでもよく、クレーンでもよい。以下では、作業機械1がショベルである場合について説明する。作業機械1は、走行体11と、上部旋回体13と、アタッチメント15と、駆動制御部17(図2参照)と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
回転埋設先端拡大翼杭
18日前
生企工営株式会社
ツース盤
12日前
株式会社 林物産発明研究所
堤防装置
28日前
株式会社パルパルス
環境保全資材
11日前
日立造船株式会社
サクション基礎
25日前
日本車輌製造株式会社
杭打機
1日前
株式会社トラバース
拡底型の鋼管杭
5日前
日立建機株式会社
作業車両
26日前
日立建機株式会社
作業車両
20日前
株式会社N-Seed
吹付工法
20日前
株式会社クボタ
フロントローダ
25日前
住友重機械工業株式会社
ショベル
19日前
日立建機株式会社
深礎掘削機
8日前
住友重機械工業株式会社
ショベル
14日前
SUS株式会社
ユニットハウス用基礎
8日前
大成建設株式会社
基礎構造
20日前
株式会社丸島アクアシステム
除塵装置
5日前
西部電機株式会社
水門開閉装置
18日前
大和ハウス工業株式会社
スラブ構築方法
4日前
鹿島建設株式会社
キャップおよび種子よけ構造
15日前
西松建設株式会社
作業機械及び操縦方法
18日前
日本建設技術株式会社
盛土造成構造
11日前
日立建機株式会社
建設機械
5日前
日立建機株式会社
建設機械
6日前
ヤンマーホールディングス株式会社
作業機械
18日前
有限会社キシムラ
防砂シート敷設構造
5日前
日本ソリッド株式会社
新規なタイヤ衝撃吸収材の装着方法
11日前
ヤンマーホールディングス株式会社
作業機械
18日前
株式会社大林組
建替え工法
4日前
コベルコ建機株式会社
建設機械の旋回フレーム
8日前
日立建機株式会社
作業機械
11日前
学校法人常翔学園
水位検出システム及び水位検出方法
8日前
ヤンマーホールディングス株式会社
作業機械
11日前
コベルコ建機株式会社
建設機械のバッテリ固定構造
5日前
ヤンマーホールディングス株式会社
アーム支持構造
18日前
ジェコス株式会社
飛散防止装置
4日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ