TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024101911
公報種別
公開特許公報(A)
公開日
2024-07-30
出願番号
2023006128
出願日
2023-01-18
発明の名称
制御装置、制御方法及びコンピュータプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20240723BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 利用者に対して、普段受けているサービスと同等のサービスを提供する。
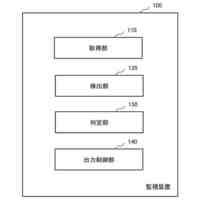
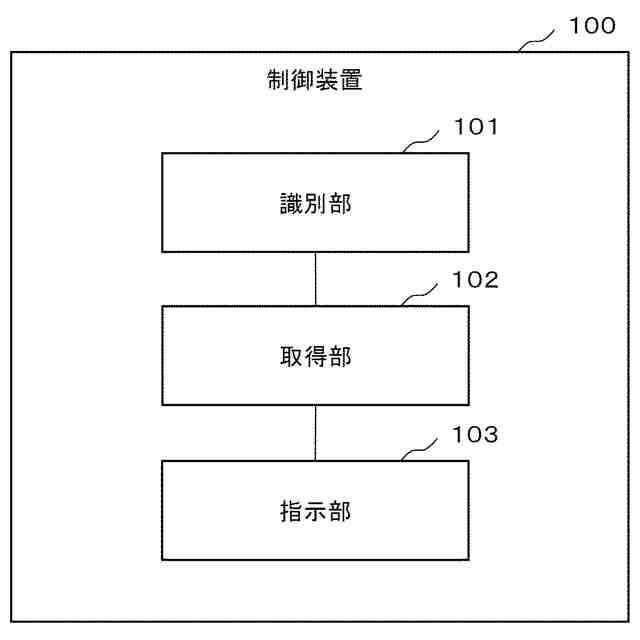
【解決手段】 第1の人物を識別する識別部と、第1の人物に関連する第2の人物の情報を取得する取得部と、第2の人物の情報に基づいて、第1の人物に対する行動を読み出す指示部とを備える制御装置。
【選択図】 図3
特許請求の範囲
【請求項1】
第1の人物を識別する識別部と、
前記第1の人物に関連する第2の人物の情報を取得する取得部と、
前記第2の人物の情報に基づいて、前記第1の人物に対する行動を読み出す指示部と
を備える制御装置。
続きを表示(約 950 文字)
【請求項2】
前記行動は、前記第1の人物に対して前記第2の人物がとった行動の特徴を含む、請求項1に記載の制御装置。
【請求項3】
前記第1の人物の担当者を第2の人物として特定する関係特定部
をさらに備える、請求項2に記載の制御装置。
【請求項4】
前記関係特定部は、人物間の距離、前記距離が所定の閾値以下となる時間、人物間の会話情報、人物間の行動関係、または人物の属性情報の少なくともいずれか1つを用いることにより、前記第1の人物の担当者を推定し、当該担当者を第2の人物として特定する
ことを特徴とする、請求項3に記載の制御装置。
【請求項5】
前記関係特定部は、前記特定された第2の人物のうち、前記第1の人物による評価が所定の閾値以上である人物を選択する
ことを特徴とする、請求項4に記載の制御装置。
【請求項6】
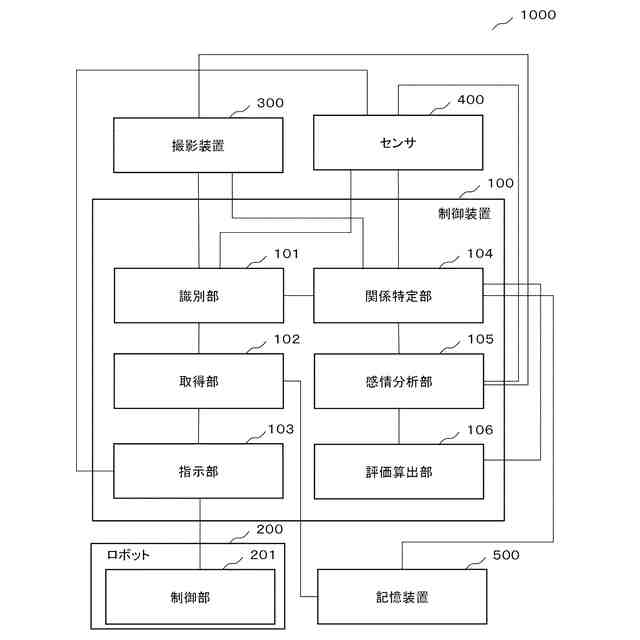
前記第1の人物の感情を推定する感情分析部と、
前記感情に基づいて前記評価を算出する評価算出部と
をさらに備える、請求項5に記載の制御装置。
【請求項7】
前記第1の人物から前記評価の入力を受け付ける入力受付部
をさらに備える、請求項5に記載の制御装置。
【請求項8】
前記第1の人物の状態を推定する人物情報取得部をさらに備え、
前記指示部は、前記状態にさらに基づいて、前記第1の人物に対する行動を読み出す
ことを特徴とする、請求項1乃至7のいずれか一項に記載の制御装置。
【請求項9】
制御装置が、
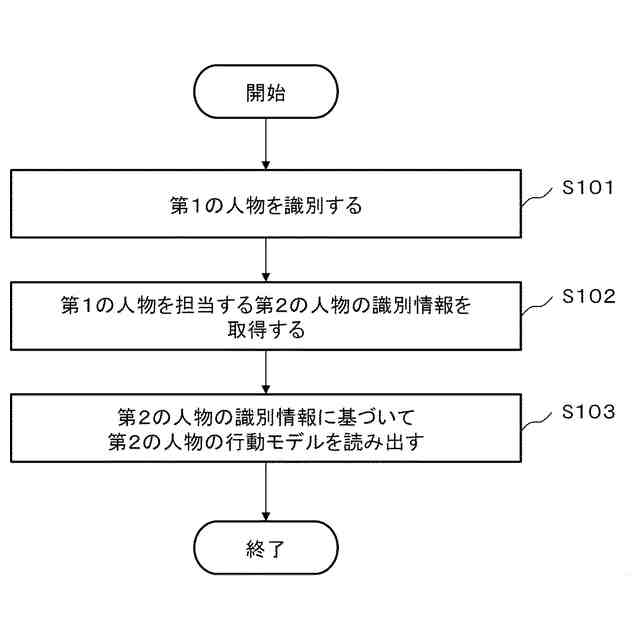
第1の人物を識別し、
前記第1の人物に関連する第2の人物の情報を取得し、
前記第2の人物の情報に基づいて、前記第1の人物に対する行動を読み出す
ことを特徴とする、制御方法。
【請求項10】
コンピュータに、
第1の人物を識別する処理と、
前記第1の人物に関連する第2の人物の情報を取得する処理と、
前記第2の人物の情報に基づいて、前記第1の人物に対する行動を読み出す処理と
を実行させる、コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、利用者に対してサービスを提供する制御を行う制御装置、制御方法及びコンピュータプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
近年、様々な分野においてロボットの普及が進んでいる。
【0003】
介護の分野では、例えば特許文献1や特許文献2に開示されているようなロボットが知られている。特許文献1に記載の介護用ロボットは、ベッドに座っている被介護者を抱きかかえて、車いすへ移動させる。特許文献2に記載の歩行支援ロボットは、被介護者の歩行を支援する。接客の分野では、例えば特許文献3に開示されているようなロボットが知られている。特許文献3に記載の接客ロボットは、商品説明、ガイダンス、顧客の呼び込み等の接客行動を行う。
【先行技術文献】
【特許文献】
【0004】
特開2010-052079号公報
特開2022-000143号公報
特開2019-032778号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
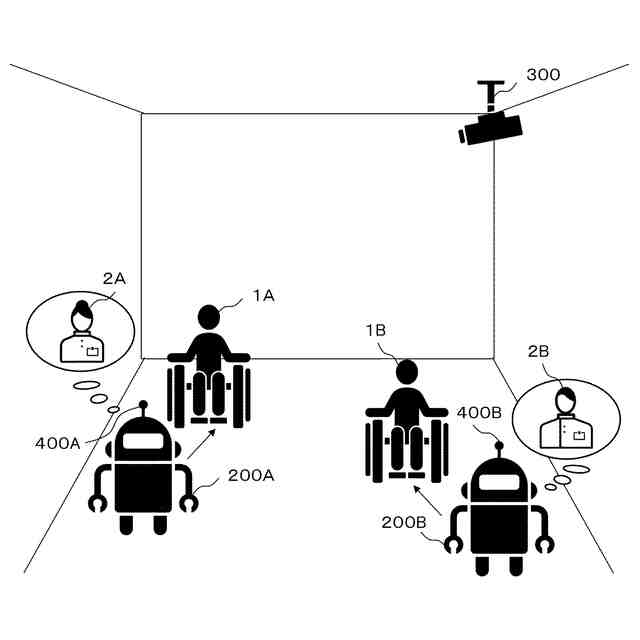
サービスを提供する人ごとに、サービスの内容(態様)は異なる。また、介護や接客においては、サービスを提供する担当者が利用者ごとに予め決められていることがある。そのため、担当者が行う作業の一部をロボットに実施させようとした場合、ロボットが提供するサービスと、担当者が提供するサービスとが異なる可能性がある。これにより、利用者は、ロボットが提供したサービスに対して違和感を抱く恐れがある。
【0006】
本発明は、上述した課題を解決するためになされたものであり、ロボットがサービスを提供した際に利用者が感じる違和感を低減することができる制御装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の制御装置は、第1の人物を識別する識別部と、第1の人物に関連する第2の人物の情報を取得する取得部と、第2の人物の情報に基づいて、第1の人物に対する行動を読み出す指示部とを備える。
【0008】
本発明の制御方法は、制御装置が、第1の人物を識別し、第1の人物に関連する第2の人物の情報を取得し、第2の人物の情報に基づいて、第1の人物に対する行動を読み出すことを特徴とする。
【0009】
本発明のコンピュータプログラムは、コンピュータに、第1の人物を識別する処理と、第1の人物に関連する第2の人物の情報を取得する処理と、第2の人物の情報に基づいて、第1の人物に対する行動を読み出す処理とを実行させる。
【発明の効果】
【0010】
本発明によれば、ロボットがサービスを提供した際に利用者が感じる違和感を低減することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
量子デバイス
4日前
日本電気株式会社
フィードスルー構造、及び水中機器
6日前
日本電気株式会社
監視装置、監視方法、及びプログラム
7日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
今日
日本電気株式会社
移動手配装置、移動手配方法及びプログラム
4日前
日本電気株式会社
遠隔巡視システム、遠隔巡視方法、プログラム
3日前
NECプラットフォームズ株式会社
薄型アンテナ
4日前
日本電気株式会社
情報提供システム、情報提供方法、及びプログラム
今日
日本電気株式会社
システム構成導出装置およびシステム構成導出方法
3日前
日本電気株式会社
情報処理システム、情報処理方法およびプログラム
今日
日本電気株式会社
処理装置、検査システム、処理方法、およびプログラム
今日
日本電気株式会社
監視装置、監視システム、監視方法、およびプログラム
6日前
日本電気株式会社
近似解探索装置、近似解探索方法および近似解探索プログラム
6日前
日本電気株式会社
動作データ生成装置、動作データ生成方法、およびプログラム
10日前
日本電気株式会社
外国語歌曲発音学習支援装置、方法、およびそのコンピュータプログラム
10日前
日本電気株式会社
搬送障害検出システム、搬送障害検出方法、及び、搬送障害検出プログラム
10日前
日本電気株式会社
情報処理システム、情報処理方法、プログラム、エッジ、及び、オーケストレータ
3日前
日本電気株式会社
データ処理装置、劣化検出装置、情報処理システム、データ処理方法、及びプログラム
7日前
日本電気株式会社
連続量量子鍵配送システムにおける共有鍵生成方法、受信機、通信制御方法およびプログラム
7日前
日本電気株式会社
連続量量子鍵配送システムにおける受信機、共有情報生成方法、通信制御方法およびプログラム
7日前
日本電気株式会社
画像処理システム、画像処理方法及びプログラム
4日前
日本電気株式会社
CADライセンス管理装置、CADライセンス管理装置の制御方法、および、CADライセンス管理装置の制御プログラム
4日前
個人
木製ハンマー
20日前
個人
関節モジュール
7日前
個人
寸切りボルト回し
3日前
個人
スロットルトリガー
17日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
5か月前
株式会社ツノダ
挟持工具
6か月前
日東工器株式会社
動力工具
24日前
日東工器株式会社
動力工具
24日前
日東工器株式会社
動力工具
24日前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
動力工具
24日前
日東工器株式会社
衝撃工具
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ