TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024100617
公報種別
公開特許公報(A)
公開日
2024-07-26
出願番号
2023004736
出願日
2023-01-16
発明の名称
作業システム及び溶接システム
出願人
国立大学法人 東京大学
,
株式会社アマダ
代理人
弁理士法人きさらぎ国際特許事務所
主分類
G06V
10/70 20220101AFI20240719BHJP(計算;計数)
要約
【課題】最低限の工数で安定的且つ高精度に溶接位置を検出することができ、且つその検出理由をオペレータが容易に把握可能にする。
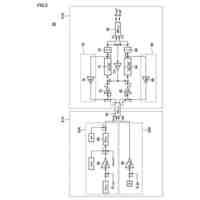
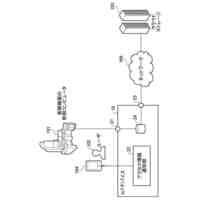
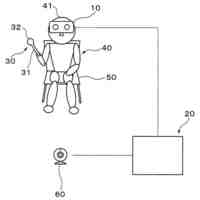
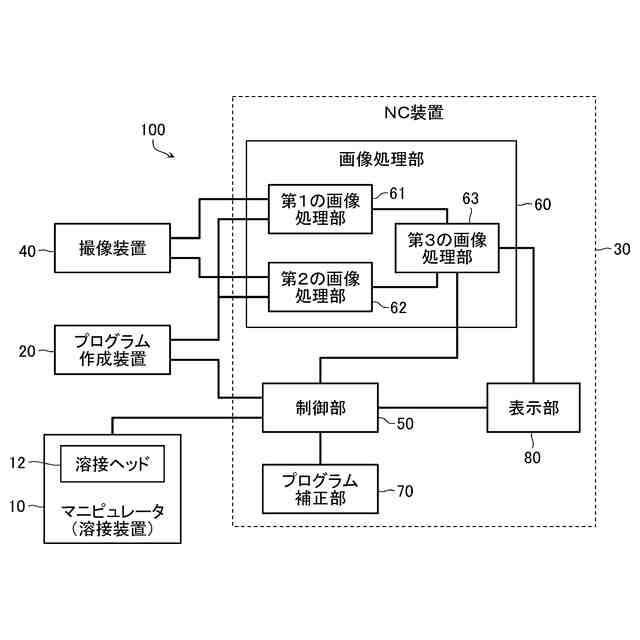
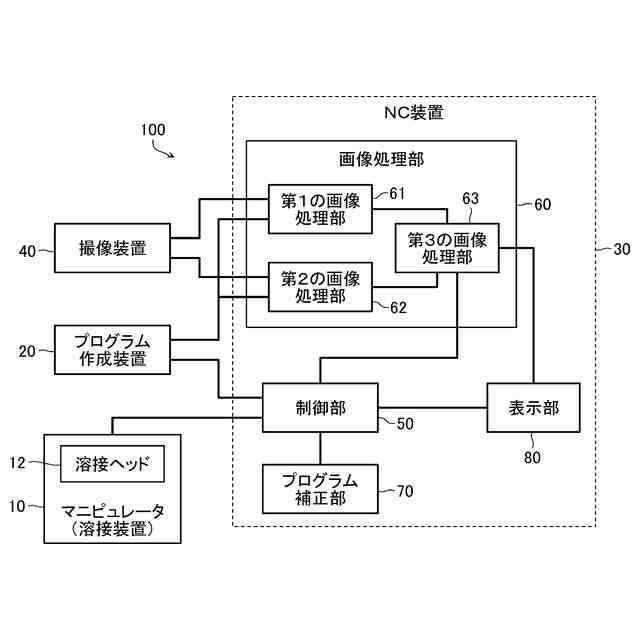
【解決手段】溶接システムは、溶接ヘッドを有し動作プログラムに基づいてこれを溶接位置まで移動させこれを用いて被加工物に対する溶接加工を実行する溶接装置と、動作プログラムを実行して溶接装置を制御する制御部と、溶接位置及びその周囲を撮像して溶接位置画像を出力する撮像装置と、溶接位置画像と動作プログラムによって溶接ヘッドが移動すべき基準溶接位置における基準画像とを入力し溶接位置画像で示される溶接位置と基準溶接位置との間の補正量及び溶接位置の信頼度を算出し溶接位置の確認のための画像を出力する画像処理部と、出力される画像を表示する表示部と、出力される補正量及び信頼度に基づいて動作プログラムを補正するプログラム補正部とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
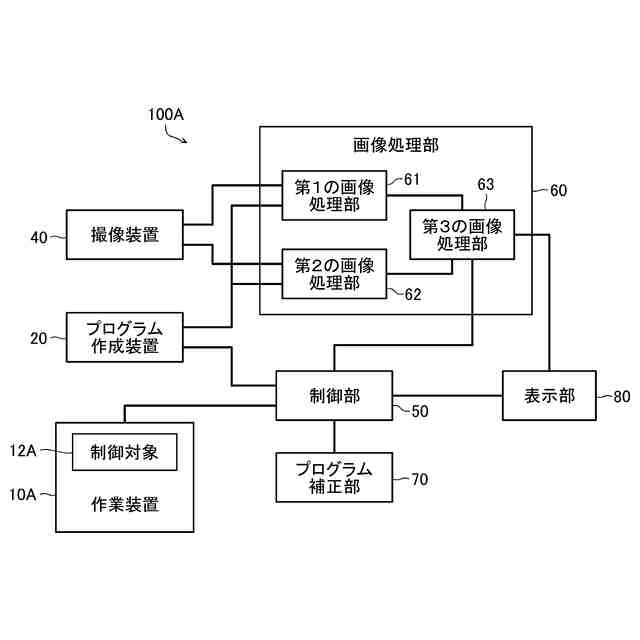
制御対象を含み、作業プログラムに基づいて、前記制御対象を所定の作業位置まで移動させ、前記制御対象を用いて所定の作業を実行する作業装置と、
前記作業プログラムを実行して前記作業装置を制御する制御部と、
前記作業位置及びその周囲を撮像して作業位置画像を出力する撮像装置と、
前記作業位置画像と、前記作業プログラムによって前記制御対象が移動すべき基準作業位置における基準画像と、を入力し、前記作業位置画像で示される前記作業位置と前記基準作業位置との間の距離に相当する前記作業位置の補正量、及び前記作業位置の信頼度を算出し、前記作業位置の確認のための画像を出力する画像処理部と、
前記画像処理部から出力される画像を表示する表示部と、
前記画像処理部から出力される前記補正量及び信頼度に基づいて前記作業プログラムを補正するプログラム補正部と、
を備え、
前記画像処理部は、
前記作業位置画像と前記基準画像との間の特徴量のマッチングによって、両画像の類似度の分布を示す第1ヒートマップ画像を生成する第1の画像処理部と、
前記作業位置画像と学習済モデルとに基づいて前記作業位置の尤度の分布を示す第2ヒートマップ画像を生成する第2の画像処理部と、
前記第1ヒートマップ画像と前記第2ヒートマップ画像とを合成して第3ヒートマップ画像を生成すると共に、前記作業位置の補正量及び信頼度を算出する第3の画像処理部と、を含み、
前記表示部は、前記第3ヒートマップ画像を表示する
作業システム。
続きを表示(約 1,800 文字)
【請求項2】
溶接ヘッドを有し、動作プログラムに基づいて、前記溶接ヘッドを溶接位置まで移動させ、前記溶接ヘッドを用いて被加工物に対する溶接加工を実行する溶接装置と、
前記動作プログラムを実行して前記溶接装置を制御する制御部と、
前記溶接位置及びその周囲を撮像して溶接位置画像を出力する撮像装置と、
前記溶接位置画像と、前記動作プログラムによって前記溶接ヘッドが移動すべき基準溶接位置における基準画像と、を入力し、前記溶接位置画像で示される前記溶接位置と前記基準溶接位置との間の距離に相当する前記溶接位置の補正量、及び前記溶接位置の信頼度を算出し、前記溶接位置の確認のための画像を出力する画像処理部と、
前記画像処理部から出力される画像を表示する表示部と、
前記画像処理部から出力される前記補正量及び信頼度に基づいて前記動作プログラムを補正するプログラム補正部と、
を備え、
前記画像処理部は、
前記溶接位置画像と前記基準画像との間の特徴量のマッチングによって、両画像の類似度の分布を示す第1ヒートマップ画像を生成する第1の画像処理部と、
前記溶接位置画像と学習済モデルとに基づいて前記溶接位置の尤度の分布を示す第2ヒートマップ画像を生成する第2の画像処理部と、
前記第1ヒートマップ画像と前記第2ヒートマップ画像とを合成して第3ヒートマップ画像を生成すると共に、前記溶接位置の補正量及び信頼度を算出する第3の画像処理部と、を含み、
前記表示部は、前記第3ヒートマップ画像を表示する
溶接システム。
【請求項3】
前記溶接ヘッドの移動及び前記溶接ヘッドによる溶接加工を指示する前記動作プログラムを作成するプログラム作成装置を更に備え、
前記プログラム作成装置は、CAMのデータから前記被加工物及びその溶接位置を含む基準画像を生成する
請求項2記載の溶接システム。
【請求項4】
前記第3の画像処理部は、前記第1ヒートマップ画像及び前記第2ヒートマップ画像のそれぞれに重みを付けて両画像を合成し、前記第3ヒートマップ画像を生成する
請求項2記載の溶接システム。
【請求項5】
前記第1の画像処理部は、前記溶接位置画像から第1の学習済モデルを用いてエッジ情報を抽出し、前記基準画像から前記溶接位置を含むエッジ情報からなるテンプレート画像を作成し、前記作成されたテンプレート画像を用いて前記溶接位置画像に対してテンプレートマッチングを行って前記溶接位置画像と前記テンプレート画像との類似度を示す前記第1ヒートマップ画像を生成し、
前記第2の画像処理部は、前記溶接位置画像と第2の学習済モデルとに基づいて前記溶接位置の尤度を示す前記第2ヒートマップ画像を生成する
請求項2記載の溶接システム。
【請求項6】
前記第1の学習済モデルは、前記溶接位置画像を説明変数、前記溶接位置画像に対応するエッジ画像を目的変数とする機械学習によって生成され、
前記第2の学習済モデルは、前記溶接位置画像を説明変数、前記溶接位置画像に対応する溶接位置の尤度を示すヒートマップ画像を目的変数とする機械学習によって生成される
請求項5記載の溶接システム。
【請求項7】
前記基準画像には、前記溶接位置画像と同様のテクスチャに近づけるために、テクスチャ情報が付加され、又は前記基準画像のテクスチャ情報が変更され、
前記第2の学習済モデルは、前記溶接位置画像及び前記基準画像を説明変数とし、前記溶接位置画像及び前記基準画像に対応する溶接位置の尤度を示すヒートマップ画像を目的変数とする機械学習によって生成される
請求項6記載の溶接システム。
【請求項8】
前記表示部は、前記第3ヒートマップ画像と、前記第1ヒートマップ画像及び前記第2ヒートマップ画像の重みを調整する操作画像と、を表示し、
前記第3の画像処理部は、前記操作画像を介した操作入力情報に基づいて、前記第1ヒートマップ画像及び前記第2ヒートマップ画像の重みを変更し、前記第3ヒートマップ画像を生成する
請求項4記載の溶接システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業システム及び溶接システムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
溶接ロボットを備えた溶接システムにおいては、溶接ロボットにおける溶接位置の教示操作(ティーチング)が予め行われる。そして、このときの移動経路及び位置座標に基づき溶接ロボットの動作プログラムが作成され、この動作プログラムに従って溶接ロボットによる溶接が行われる。
【0003】
また、同じ溶接が行われる被加工物に対しては、上記の教示操作で作成された動作プログラムに基づき、同じ溶接位置に対する連続した溶接が行われる。この際、被加工物の製造上のばらつき等の個体差により、溶接ロボットによる溶接位置と動作プログラム上の溶接位置とが必ずしも一致しない場合がある。このため、被加工物の溶接位置をカメラで撮像し、動作プログラム上の溶接位置との位置ずれを検出して、動作プログラムを自動補正した上で溶接を行うことが行われている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特許第5537868号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に開示された従来技術の溶接ロボットでは、撮像画像のばらつき、カメラ自体の性能差、被加工物の表面状態等の個体差、及び周辺環境等の環境要因、並びにオペレータによる教示操作等の人的要因によって、被加工物のロット毎に抽出されるエッジ情報が異なることがある。このため、溶接位置の検出精度に差が生じ、誤検出が発生してしまう場合がある。また、抽出されたエッジ情報によっては、パターンマッチングの結果のピークが複数現れ、又はピークが広がることにより、溶接位置を一意に決定することができないことがある。このような場合、オペレータは環境要因の調整のために各種操作及び設定をしたり、誤検出の原因追及のために詳細な調査をしたりすることが必要となってしまう。このため、溶接に関する工数を削減することができないという問題がある。
【0006】
本発明の一態様は、最低限の工数で安定的且つ高精度に溶接位置を検出することができ、且つその検出理由をオペレータが容易に把握可能な作業システム及び溶接システムである。
【課題を解決するための手段】
【0007】
本発明の一態様に係る作業システムは、制御対象を含み、作業プログラムに基づいて、前記制御対象を所定の作業位置まで移動させ、前記制御対象を用いて所定の作業を実行する作業装置と、前記作業プログラムを実行して前記作業装置を制御する制御部と、前記作業位置及びその周辺を撮像して作業位置画像を出力する撮像装置と、前記作業位置画像と、前記作業プログラムによって前記制御対象が移動すべき基準作業位置における基準画像と、を入力し、前記作業位置画像で示される前記作業位置と前記基準作業位置との間の距離に相当する前記作業位置の補正量、及び前記作業位置の信頼度(補正された作業位置の信頼度)を算出し、前記作業位置の確認のための画像を出力する画像処理部と、前記画像処理部から出力される画像を表示する表示部と、前記画像処理部から出力される前記補正量及び信頼度に基づいて前記作業プログラムを補正するプログラム補正部と、を備え、前記画像処理部は、前記作業位置画像と前記基準画像との間の特徴量のマッチングによって、両画像の類似度の分布を示す第1ヒートマップ画像を生成する第1の画像処理部と、前記作業位置画像と学習済モデルとに基づいて前記作業位置の尤度の分布を示す第2ヒートマップ画像を生成する第2の画像処理部と、前記第1ヒートマップ画像と前記第2ヒートマップ画像とを合成して第3ヒートマップ画像を生成すると共に、前記作業位置の補正量および信頼度を算出する第3の画像処理部と、を含み、前記表示部は、前記第3ヒートマップ画像を表示する。
【0008】
本発明の一態様に係る溶接システムは、溶接ヘッドを有し、動作プログラムに基づいて、前記溶接ヘッドを溶接位置まで移動させ、前記溶接ヘッドを用いて被加工物に対する溶接加工を実行する溶接装置と、前記動作プログラムを実行して前記溶接装置を制御する制御部と、前記溶接位置及びその周囲を撮像して溶接位置画像を出力する撮像装置と、前記溶接位置画像と、前記動作プログラムによって前記溶接ヘッドが移動すべき基準溶接位置における基準画像と、を入力し、前記溶接位置画像で示される前記溶接位置と前記基準溶接位置との間の距離に相当する前記溶接位置の補正量、及び前記溶接位置の信頼度を算出し、前記溶接位置の確認のための画像を出力する画像処理部と、前記画像処理部から出力される画像を表示する表示部と、前記画像処理部から出力される前記補正量及び信頼度に基づいて前記動作プログラムを補正するプログラム補正部と、を備え、前記画像処理部は、前記溶接位置画像と前記基準画像との間の特徴量のマッチングによって、両画像の類似度の分布を示す第1ヒートマップ画像を生成する第1の画像処理部と、前記溶接位置画像と学習済モデルとに基づいて前記溶接位置の尤度の分布を示す第2ヒートマップ画像を生成する第2の画像処理部と、前記第1ヒートマップ画像と前記第2ヒートマップ画像とを合成して第3ヒートマップ画像を生成すると共に、前記溶接位置の補正量及び信頼度を算出する第3の画像処理部と、を含み、前記表示部は、前記第3ヒートマップ画像を表示する。
【0009】
本発明の一態様に係る作業システムによれば、画像処理部が、制御対象の作業位置及びその周囲を撮像した作業位置画像と、作業プログラムにより制御対象が移動すべき基準作業位置における基準画像と、を入力して、作業位置画像で示される作業位置と基準作業位置との間の距離に相当する作業位置の補正量、及び作業位置の信頼度を算出し、作業位置の確認のための画像を出力する。また、プログラム補正部が、画像処理部から出力される補正量及び信頼度に基づいて作業プログラムを補正する。このため、制御部が補正された作業プログラムを実行して制御対象を補正された作業位置へ自動的に移動させ所定の作業を実行するように作業装置を制御すると共に、表示部に表示される画像に基づき補正された作業位置を信頼度と共に確認することができるので、最低限の工数で安定的且つ高精度に作業位置を検出可能で、且つその検出理由をオペレータが容易に把握可能となる。
【0010】
また、本発明の一態様に係る溶接システムによれば、画像処理部が、溶接装置の溶接ヘッドによる溶接位置及びその周囲を撮像した溶接位置画像と、動作プログラムにより溶接ヘッドが移動すべき基準溶接位置における基準画像と、を入力して、溶接位置画像で示される溶接位置と基準溶接位置との間の距離に相当する溶接位置の補正量、及び溶接位置の信頼度を算出し、溶接位置の確認のための画像を出力する。また、プログラム補正部が、画像処理部から出力される補正量及び信頼度に基づいて動作プログラムを補正する。このため、制御部が補正された動作プログラムを実行して溶接ヘッドを補正された溶接位置へ自動的に移動させるように溶接装置を制御すると共に、表示部に表示される画像に基づき補正された溶接位置を信頼度と共に確認することができるので、最低限の工数で安定的且つ高精度に溶接位置を検出可能で、且つその検出理由をオペレータが容易に把握可能となる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人 東京大学
プロペラ
3日前
国立大学法人東京農工大学
タンクモジュール
26日前
国立大学法人 東京大学
粘性の測定装置及び方法
19日前
国立大学法人 東京大学
制御装置、および制御方法
24日前
国立大学法人 東京大学
消化管幹細胞活性化用組成物
3日前
国立大学法人 東京大学
炭酸カルシウム結晶の製造方法
3日前
国立大学法人 東京大学
血糖制御能力の推定方法及び装置
26日前
国立大学法人 東京大学
搬送トレイおよびワーク作業装置
1か月前
国立大学法人 東京大学
スピーカー及びオーディオシステム
12日前
国立大学法人 東京大学
東大式メイクアップ理論による肌年齢推定方法
3日前
国立大学法人 東京大学
ジエン系高靭性エラストマーおよびその製造方法
1か月前
国立大学法人 東京大学
情報処理システム、プログラム及び情報処理方法
25日前
国立大学法人 東京大学
情報処理システム、プログラム及び情報処理方法
25日前
個人
生体ガスの分析に基づく腸炎の診断補助方法
19日前
国立大学法人 東京大学
楽器用樹脂構造体および楽器用樹脂構造体の製造方法
5日前
国立大学法人 東京大学
静脈置換用緩徐生分解性シルクフィブロイン人工血管
13日前
積水化学工業株式会社
圧電素子及びウェアラブルデバイス
24日前
国立大学法人 東京大学
核酸アプタマー及び当該核酸アプタマーを含む骨再生誘導材
1か月前
国立大学法人 東京大学
IoTデバイス、データ転送システムおよびデータ転送方法
24日前
学校法人東京女子医科大学
ハイドロゲルおよびその製造方法
1か月前
ケンツメディコ株式会社
特定装置及びコンピュータプログラム
1か月前
ダイキン工業株式会社
情報処理装置、情報処理方法及びプログラム
17日前
日本電信電話株式会社
学習方法、推論方法、学習装置、推論装置及びプログラム
25日前
国立大学法人 東京大学
敗血症判定プログラム、敗血症判定装置、敗血症判定方法及び敗血症判定システム
19日前
国立大学法人 東京大学
耐震性判定システム、耐震性判定装置、耐震性判定方法及び耐震性判定プログラム
5日前
国立大学法人 東京大学
極低温用熱スイッチ、極低温用熱スイッチの製造方法及び連続核断熱消磁冷凍ユニット
1か月前
国立大学法人 東京大学
情報処理システム、データ構造、情報処理方法、プログラム、および非一時的な記録媒体
12日前
ダイキン工業株式会社
電力変換システム、ヒートポンプシステム、及び太陽光発電システム
17日前
株式会社ヒカリッチフードサイエンス
煮干しの製造方法及び製造された煮干しを用いただしの調製方法
1か月前
国立大学法人 東京大学
ラマン分光信号増強ナノ粒子、ラマン分光信号増強ナノ粒子分散液及びラマン分光信号増強ナノ粒子の製造方法
1か月前
国立大学法人 東京大学
視空間認知障害者の検査システム、視空間認知障害者の訓練システムおよび視空間認知障害者の空間動作支援システム
23日前
国立大学法人 東京大学
Myclの一過性発現による増殖可能な膵島前駆細胞様細胞の誘導とインスリン陽性細胞への分化誘導
10日前
ウィスコンシン アルムニ リサーチ ファンデイション
卵内複製のための安定化されたHAを持つ組換えインフルエンザウイルス
17日前
個人
非正規コート
13日前
個人
人物再現システム
10日前
個人
AI飲食最適化プラグイン
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ