TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024086245
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022201272
出願日
2022-12-16
発明の名称
トンネル工事のずり排出方法
出願人
株式会社フジタ
代理人
個人
主分類
E21D
9/12 20060101AFI20240620BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】トンネル工事の省人化および効率化を図る上で有利なトンネル工事のずり排出方法を提供する。
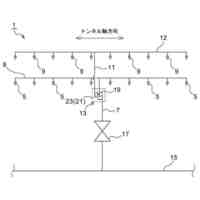
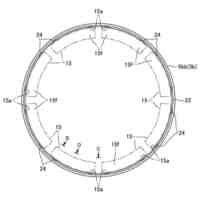
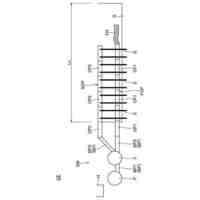
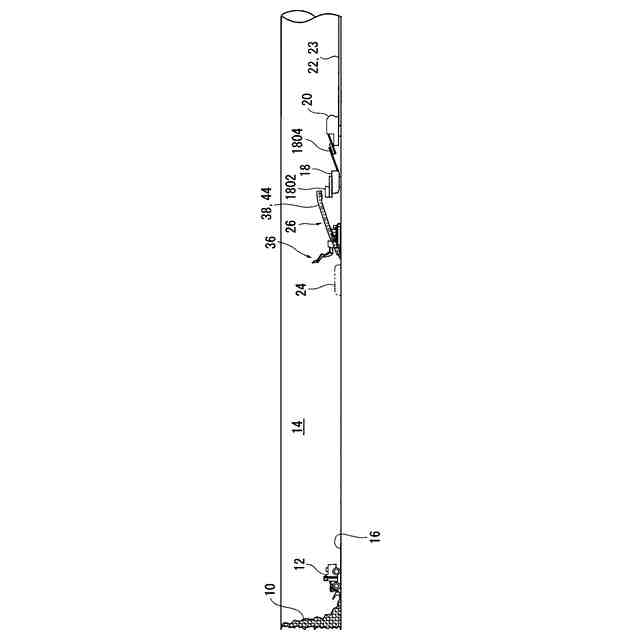
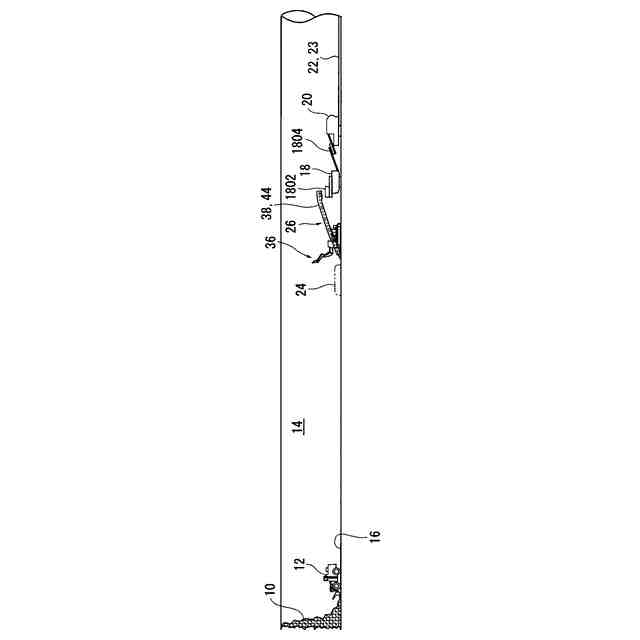
【解決手段】切羽10を爆破して切羽10を掘削した後、ずりの仮置き場24を設け、掘削されたずりを切羽10から仮置き場24に運搬して積載し、ずり積み込み機26によって仮置き場24からずりをクラッシャー18に搬送し、クラッシャー18で破砕されたずりを長尺ベルトコンベア装置22によって坑口に向けて運搬する際に、仮置き場側ずり量検出部32によって、仮置き場24に積載されたずりの量を仮置き場ずり量として検出し、ホイールローダ12に設けた主制御部12Dによって、仮置き場ずり量に基づいてクラッシャー18および長尺ベルトコンベア装置22を制御するようにした。
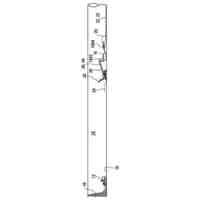
【選択図】図1
特許請求の範囲
【請求項1】
切羽を爆破して切羽を掘削した後、爆破により掘削されたずりを前記切羽から坑口へ運搬するトンネル工事におけるずりの搬送方法であって、
トンネルの延在方向において前記切羽寄りの箇所に仮置き場を設け、
前記掘削されたずりを前記切羽から前記仮置き場に運搬して積載する運搬用重機を設け、
前記ずり仮置場の近傍にずりを破砕するクラッシャーを設け、
前記仮置き場からずりを前記クラッシャーに搬送するずり積み込み機を設け、
前記クラッシャーで破砕されたずりを前記坑口に向けて運搬する長尺ベルトコンベア装置を設け、
前記仮置き場に積載されたずりの量を仮置き場ずり量として検出する仮置き場側ずり量検出部を設け、
前記仮置き場ずり量に基づいて前記クラッシャーおよび前記長尺ベルトコンベア装置を制御する主制御部を前記運搬用重機に設けた、
ことを特徴とするトンネル工事のずり排出方法。
続きを表示(約 1,000 文字)
【請求項2】
前記仮置き場側ずり量検出部は、
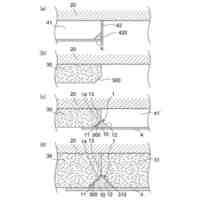
前記仮置き場およびその周辺にレーザー光を照射して点群データを取得する仮置き場側3Dレーザースキャナーと、
前記点群データから3次元画像情報を生成する仮置き場側3次元画像情報生成部と、
前記3次元画像情報に基づいて前記仮置き場ずり量を推定する仮置き場ずり量推定部とを備える、
ことを特徴とする請求項1記載のトンネル工事のずり排出方法。
【請求項3】
前記運搬用重機は、前記運搬用重機の周辺の前記切羽を含むトンネル坑内の状況に関する情報を含む第1周辺情報を取得する第1周辺情報取得部を備え、
前記主制御部は、前記第1周辺情報に基づいて前記運搬用重機の動作を制御する機能を備える、
ことを特徴とする請求項2記載のトンネル工事のずり排出方法。
【請求項4】
前記第1周辺情報取得部は、前記運搬用重機の周辺の前記切羽を含むトンネル坑内にレーザー光を照射して点群データを取得する運搬用重機側3Dレーザースキャナーと、前記点群データから前記第1周辺情報としての3次元画像情報を生成する運搬用重機側3次元画像情報生成部とを備える、
ことを特徴とする請求項3記載のトンネル工事のずり排出方法。
【請求項5】
前記運搬用重機側3Dレーザースキャナーは、前記仮置き場側3Dレーザースキャナーを兼用し、
前記運搬用重機側3次元画像情報生成部は前記仮置き場側3次元画像情報生成部を兼用する、
ことを特徴とする請求項4記載のトンネル工事のずり排出方法。
【請求項6】
前記ずり積み込み機は、前記ずり積み込み機の周辺の前記仮置き場を含むトンネル坑内の状況に関する情報を含む第2周辺情報を取得する第2周辺情報取得部を備え、
前記主制御部は、前記第2周辺情報に基づいて前記ずり積み込み機の動作を制御する機能を備える、
ことを特徴とする請求項1記載のトンネル工事のずり排出方法。
【請求項7】
前記第2周辺情報取得部は、前記ずり積み込み機の周辺のトンネル坑内にレーザー光を照射して点群データを取得する前記ずり積み込み機側3Dレーザースキャナーと、前記点群データから前記第2周辺情報としての3次元画像情報を生成する前記ずり積み込み機側3次元画像情報生成部とを備える、
ことを特徴とする請求項6記載のトンネル工事のずり排出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明はトンネル工事のずり排出方法に関する。
続きを表示(約 5,700 文字)
【背景技術】
【0002】
トンネル工事において、爆破工程および削岩機で掘削されたずりを坑口へ搬送する場合、切羽側においてクラッシャーを配置し、クラッシャーから坑口に向かって連続ベルトコンベア装置を延在させている。
そして、切羽で発生したずりをホイールローダのような油圧ショベルにより掻き取り、クラッシャーまで運搬してクラッシャーに投入し、クラッシャーで破砕された掘削ずりをクラッシャーから連続ベルトコンベア装置に積載し、ずりを連続ベルトコンベア装置によって坑口に向けて搬送する。
ところで、クラッシャーに対して一度に投入可能なずり量には上限があることから、大量のずりを一度にクラッシャーに投入することはできず、時間をかけながらずりを徐々にクラッシャーに投入する必要があることから、ずりをクラッシャーへ投入する際にはある程度の時間がかかる。
爆破工程毎に、ホイールローダの100mから130mの距離の往復移動が数十回程度なされることからホイールローダの往復移動に多大な時間を要することは無論のこと、さらに上述したようにホイールローダによるずりのクラッシャーへの投入にも時間を要することから、掘削ずりの搬出効率を高める上で改善の余地があった。
そこで、本出願人は、切羽とクラッシャーとの中間地点に仮置き場を設け、油圧ショベルによって切羽のずりを仮置き場に運搬すると共に、仮置き場の近傍に設けたずり積み込み機を用いてずりをクラッシャーに投入することにより、爆破工程後の切羽のずりの後処理を、従来に比べて短時間で済ませることができるトンネル工事のずり排出方法を提案している(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第7097286号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、クラッシャーおよび連続ベルトコンベア装置は、タイマーに設定された稼働時間だけ動作され、稼働時間の経過後に動作が停止されるようになっている。
したがって、作業者が仮置き場のずり量を目視によって判断し、ずり量に見合った稼働時間をタイマーに設定することが必要となる。これは爆破工程によって発生するずり量が一定ではなく爆破工程のたびに異なったずり量となるためである。
そのため、爆破工程のたびに、作業員が仮置き場のずり量を目視で判断し、ずり量に見合った稼働時間を作業員が想定してタイマーに設定する作業が必要となることから、作業員が必要となることは無論のこと、作業員の目視でずり量を判断することから作業員の経験の差などによって設定される稼働時間にばらつきが生じ、ずり量に見合った正確な稼働時間をタイマーに設定することは難しく、クラッシャーおよび連続ベルトコンベア装置を効率的に稼働させる上で改善の余地がある。
本発明は前記事情に鑑み案出されたものであり、その目的は、トンネル工事の省人化および効率化を図る上で有利なトンネル工事のずり排出方法を提供することにある。
【課題を解決するための手段】
【0005】
上述の目的を達成するため、本発明の一実施の形態は、切羽を爆破して切羽を掘削した後、爆破により掘削されたずりを前記切羽から坑口へ運搬するトンネル工事におけるずりの搬送方法であって、トンネルの延在方向において前記切羽寄りの箇所に仮置き場を設け、前記掘削されたずりを前記切羽から前記仮置き場に運搬して積載する運搬用重機を設け、前記ずり仮置場の近傍にずりを破砕するクラッシャーを設け、前記仮置き場からずりを前記クラッシャーに搬送するずり積み込み機を設け、前記クラッシャーで破砕されたずりを前記坑口に向けて運搬する長尺ベルトコンベア装置を設け、前記仮置き場に積載されたずりの量を仮置き場ずり量として検出する仮置き場側ずり量検出部を設け、前記仮置き場ずり量に基づいて前記クラッシャーおよび前記長尺ベルトコンベア装置を制御する主制御部を前記運搬用重機に設けたことを特徴とする。
本発明の一実施の形態は、前記仮置き場側ずり量検出部は、前記仮置き場およびその周辺にレーザー光を照射して点群データを取得する仮置き場側3Dレーザースキャナーと、前記点群データから3次元画像情報を生成する仮置き場側3次元画像情報生成部と、前記3次元画像情報に基づいて前記仮置き場ずり量を推定する仮置き場ずり量推定部とを備えることを特徴とする。
本発明の一実施の形態は、前記運搬用重機は、前記運搬用重機の周辺の前記切羽を含むトンネル坑内の状況に関する情報を含む第1周辺情報を取得する第1周辺情報取得部を備え、前記主制御部は、前記第1周辺情報に基づいて前記運搬用重機の動作を制御する機能を備えることを特徴とする。
本発明の一実施の形態は、前記第1周辺情報取得部は、前記運搬用重機の周辺の前記切羽を含むトンネル坑内にレーザー光を照射して点群データを取得する運搬用重機側3Dレーザースキャナーと、前記点群データから前記第1周辺情報としての3次元画像情報を生成する運搬用重機側3次元画像情報生成部とを備えることを特徴とする。
本発明の一実施の形態は、前記運搬用重機側3Dレーザースキャナーは、前記仮置き場側3Dレーザースキャナーを兼用し、前記運搬用重機側3次元画像情報生成部は前記仮置き場側3次元画像情報生成部を兼用することを特徴とする。
本発明の一実施の形態は、前記ずり積み込み機は、前記ずり積み込み機の周辺の前記仮置き場を含むトンネル坑内の状況に関する情報を含む第2周辺情報を取得する第2周辺情報取得部を備え、前記主制御部は、前記第2周辺情報に基づいて前記ずり積み込み機の動作を制御する機能を備えることを特徴とする。
本発明の一実施の形態は、前記第2周辺情報取得部は、前記ずり積み込み機の周辺のトンネル坑内にレーザー光を照射して点群データを取得する前記ずり積み込み機側3Dレーザースキャナーと、前記点群データから前記第2周辺情報としての3次元画像情報を生成する前記ずり積み込み機側3次元画像情報生成部とを備えることを特徴とする。
【発明の効果】
【0006】
本発明の一実施の形態によれば、仮置き場側ずり量検出部によって、仮置き場に積載されたずりの量を仮置き場ずり量として検出し、運搬用重機に設けた主制御部によって、仮置き場ずり量に基づいてクラッシャーおよび長尺ベルトコンベア装置を制御するようにした。
したがって、クラッシャーおよび長尺ベルトコンベア装置の自動制御を実現することができ、仮置き場側ずり量検出部によって検出された正確なずり量に基づいてクラッシャーおよび長尺ベルトコンベア装置を制御できることからクラッシャーおよび連続ベルトコンベア装置を効率的に稼働させる上で有利となり、トンネル工事の省人化および効率化を図る上で有利となる。
また、運搬用重機に設けた主制御部によって、クラッシャーおよび長尺ベルトコンベア装置を制御するようにしたので、各装置を一括して制御する主制御装置を別途設ける必要がなく、各装置を制御するための構成を簡素化しコストの低減を図る上で有利となる。
また、主制御装置を別途設ける場合に必要となる主制御装置の設置作業や撤去作業が不要となり、主制御装置の設置スペースも不要となるため、トンネル工事の省人化および効率化を図る上で有利となることは無論のこと、トンネルの坑内あるいは坑外のスペースを確保することが困難な場合であっても問題なくトンネル工事を行なうことができ有利となる。
また、本発明の一実施の形態によれば、3次元画像情報に基づいて仮置き場ずり量を正確に推定することができるため、仮置き場ずり量に基づいてクラッシャーおよび長尺ベルトコンベア装置の制御を正確に確実に行なう上で有利となり、トンネル工事の省人化および効率化を図る上で有利となる。
また、本発明の一実施の形態によれば、第1周辺情報に基づいて運搬用重機の自動制御を行なえることは無論のこと、運搬用重機の動作の制御を正確に確実に行なう上で有利となり、省人化を図りトンネル工事の効率化を図る上で有利となる。
また本発明の一実施の形態によれば、第1周辺情報が3次元画像情報で構成されているため、運搬用重機の動作の制御を正確に確実に行なう上でより有利となり、トンネル工事の省人化および効率化を図る上でより有利となる。
また、本発明の一実施の形態によれば、3Dレーザースキャナーおよび3次元画像情報生成部の数を低減でき、構成の簡素化、部品点数の削減を図ることができることから、コストの低減を図る上で有利となる。
また、本発明の一実施の形態によれば、第2周辺情報に基づいてずり積み込み機の自動制御を行なえるので省人化を図れることは無論のこと、主制御部は第2周辺情報に基づいて仮置き場のずりの量を正確に把握することができ、ずり積み込み機の動作の制御を正確に確実に行なう上でより有利となり、トンネル工事の省人化および効率化を図る上でより有利となる。
また、本発明の一実施の形態によれば、第2周辺情報が3次元画像情報で構成されているため、ずり積み込み機の動作の制御を正確に確実に行なう上でより有利となり、トンネル工事の省人化および効率化を図る上でより有利となる。
【図面の簡単な説明】
【0007】
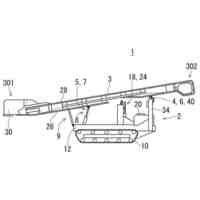
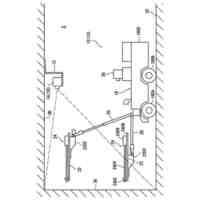
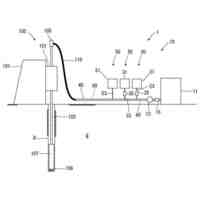
実施の形態のトンネル工事のずり排出方法の説明図である。
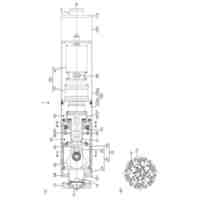
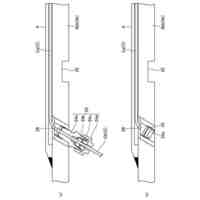
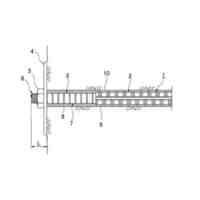
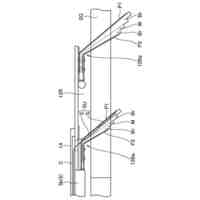
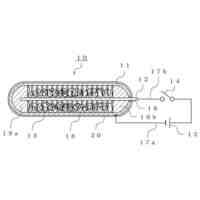
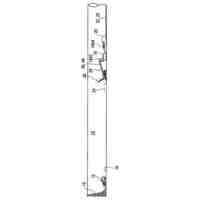
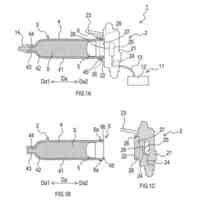
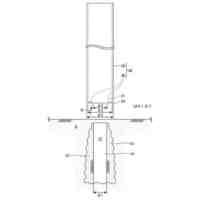
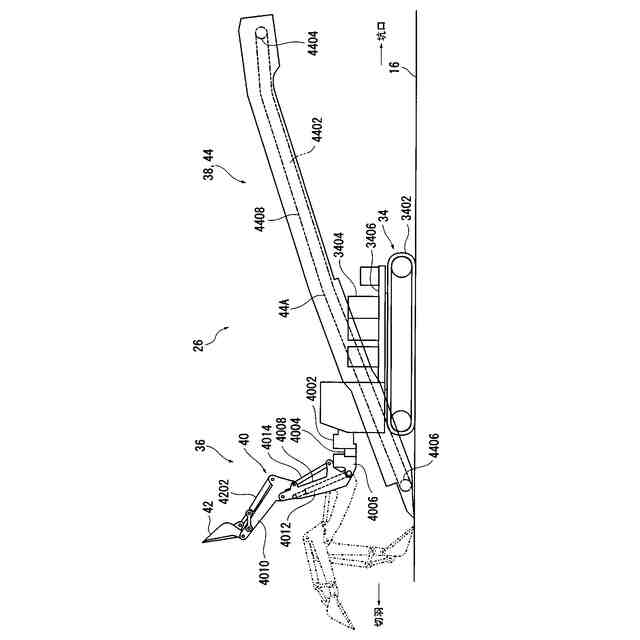
ずり積み込み機の側面図である。
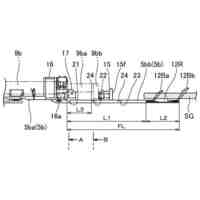
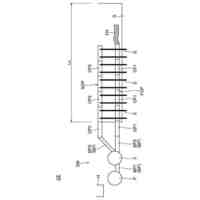
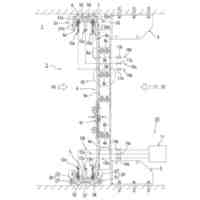
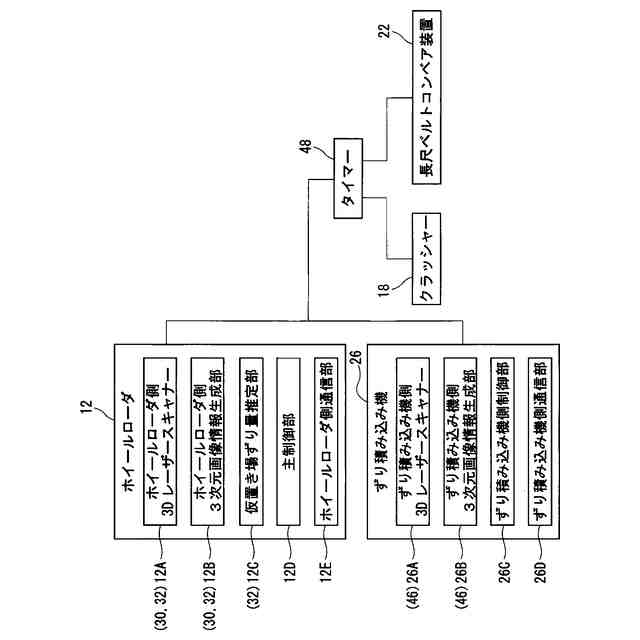
実施の形態のトンネル工事のずり排出方法に用いられるホイールローダ、ずり積み込み機、制御装置、タイマー、クラッシャー、長尺ベルトコンベア装置の全体構成を示すブロック図である。
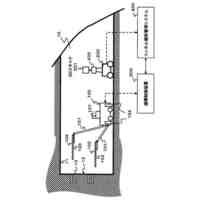
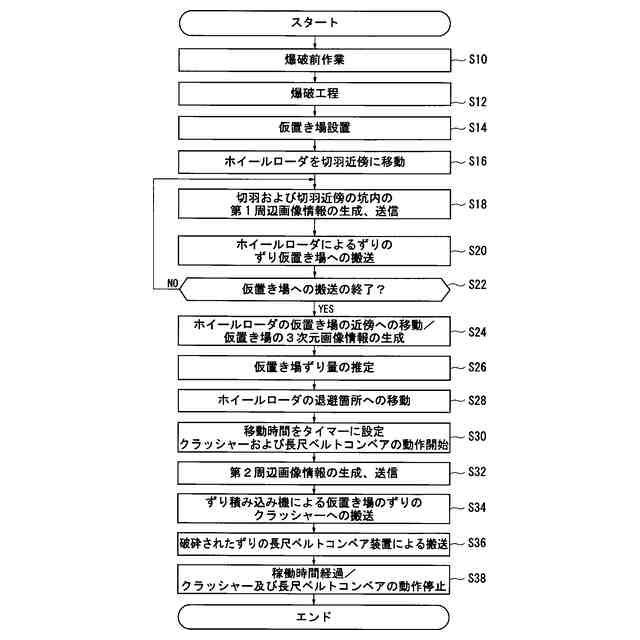
実施の形態のトンネル工事のずり排出方法のフローチャートである。
【発明を実施するための形態】
【0008】
次に本発明の実施の形態について図面を参照して説明する。
図1に示すように、切羽10の付近には一台または複数台のホイールローダ12が配置され、爆破工程における爆風の影響を避けるため、切羽10から所定距離、離れた箇所に、例えば、約100m程度坑口側に離れた箇所でトンネル床面16の幅方向の一側に、坑口側に向けてクラッシャー18とテールピース台車20が並べられて配置され、テールピース台車20から坑口に向かって長尺ベルトコンベア装置(連続ベルトコンベア装置ともいう)22が延在している。
そして、トンネル14の延在方向において切羽10とクラッシャー18との中間地点に仮置き場24が設けられ、仮置き場24とクラッシャー18との間の箇所にずり積み込み機(ロックローダともいう)26が配置されている。
また、ホイールローダ12には、図3に示す主制御部12Dが設置され、この主制御部12Dによってホイールローダ12、ずり積み込み機26、クラッシャー18、長尺ベルトコンベア装置22が制御される。
以下、ホイールローダ12、ずり積み込み機26、クラッシャー18、テールピース台車20、長尺ベルトコンベア装置22、主制御部12Dについて具体的に説明する。
【0009】
ホイールローダ12は、爆破工程によって切羽10が掘削されることで発生したずりを仮置き場24に搬送する自走式の運搬用重機(油圧ショベル)である。本実施の形態では、運搬用重機としてホイールローダ12を用いた場合について説明するが、運搬用重機はずりを運搬することができればよく、バックホウやブルドーザなどホイールローダ12以外の従来公知の様々な自走式の運搬用重機を用いることができる。
本実施の形態では、ホイールローダ12は、エンジンなどの駆動源、駆動源の駆動力によって回転駆動されるタイヤによって走行する本体、本体に設けられずりをすくい取るバケット、バケットを駆動する油圧シリンダ、油圧シリンダを駆動する油圧源などを含んで構成されている。
【0010】
また、図3に示すように、ホイールローダ12は、ホイールローダ側3Dレーザースキャナー12Aと、ホイールローダ側3次元画像情報生成部12Bと、仮置き場ずり量推定部12Cと、主制御部12Dと、ホイールローダ側通信部12Eとを含んで構成されている。
なお、ホイールローダ側3次元画像情報生成部12Bと、仮置き場ずり量推定部12Cと、主制御部12Dと、ホイールローダ側通信部12Eとは、ホイールローダ12に設けられたコンピュータが制御プログラムを実行することによって実現される。
ホイールローダ側3Dレーザースキャナー12Aは、ホイールローダ12の本体に設けられ、ホイールローダ12の周辺の切羽10を含むトンネル14坑内にレーザー光を照射して点群データを取得するものである。
ホイールローダ側3次元画像情報生成部12Bは、ホイールローダ側3Dレーザースキャナー12Aで取得された点群データから第1周辺情報としての3次元画像情報を生成するものである。
ここで、第1周辺情報とは、ホイールローダ12の周辺の切羽10を含むトンネル14坑内の状況に関する情報を含む情報である。
また、本実施の形態では、ホイールローダ側3Dレーザースキャナー12Aと、ホイールローダ側3次元画像情報生成部12Bとによって、第1周辺情報を取得する第1周辺情報取得部30が構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社フジタ
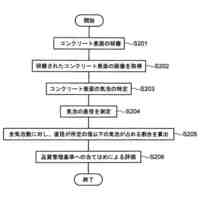
コンクリート構造物の評価方法
20日前
株式会社フジタ
杭撤去用のケーシングと、杭撤去用の地盤解し装置及び地盤解し方法
7日前
個人
ずり積込み装置
4か月前
株式会社エステック
掘削機
4か月前
個人
高速道路トンネルの強靭化法
今日
能美防災株式会社
水噴霧設備
2か月前
株式会社奥村組
削孔システム
3か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社神島組
破砕工法
22日前
戸田建設株式会社
ロックボルト
22日前
株式会社奥村組
シールド掘進機
1か月前
株式会社奥村組
シールド掘進機
1か月前
戸田建設株式会社
面木
4か月前
株式会社奥村組
インバート用打設設備
1か月前
株式会社奥村組
インバートの打設方法
1か月前
株式会社堤水素研究所
発破装置
3か月前
株式会社奥村組
テールシールの交換構造
1か月前
日特建設株式会社
ビット及び削孔機
3か月前
株式会社フジタ
遠隔操作トンネル掘削装置
5か月前
個人
鉱物採取具
4か月前
テクノス株式会社
鋼製セグメント製造設備
3か月前
株式会社フジタ
トンネル工事のずり排出方法
5か月前
株式会社フジタ
トンネル工事のずり排出方法
5か月前
六菱ゴム株式会社
止水装置
5か月前
株式会社フジタ
切羽穿孔機の遠隔制御システム
5か月前
株式会社エステック
カッターヘッド及び掘削機
1か月前
ハイテック株式会社
気泡生成装置および掘削装置
3か月前
大成建設株式会社
トンネルの変位予測方法
2か月前
株式会社郡産業
ハンマーグラブ用ソケット
28日前
日本ヒューム株式会社
プレキャスト部材の継手構造
3か月前
株式会社CREATIVE21
空圧ディスペンサ及びカートリッジ
4か月前
株式会社奥村組
シールド掘進機の後胴部の伸縮方法
1か月前
ケミカルグラウト株式会社
貫通位置予測方法
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ