TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024079157
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022191917
出願日
2022-11-30
発明の名称
3次元搬送経路探索装置および3次元搬送経路探索方法
出願人
株式会社日立製作所
,
株式会社日立プラントメカニクス
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G01C
21/34 20060101AFI20240604BHJP(測定;試験)
要約
【課題】精度の高い経路探索を行うことができる3次元搬送経路探索装置の提供。
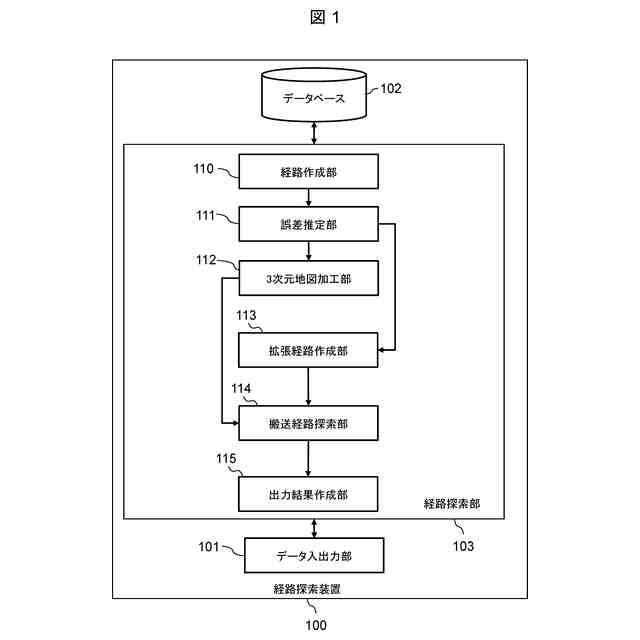
【解決手段】3次元搬送経路探索装置は、移動物の移動経路に該移動物の位置誤差に基づく第1の幅を付与して得られる拡張移動経路に関する拡張搬送経路情報207、および、障害物の大きさの情報を含む3次元地図204の情報を記憶するデータベース102と、データベース102に記憶された拡張搬送経路情報207および3次元地図204の情報に基づいて、移動物および搬送物が障害物と衝突しない3次元搬送経路を生成する搬送経路探索部と、を備える。
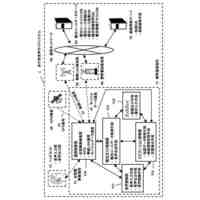
【選択図】図2
特許請求の範囲
【請求項1】
搬送物を搬送する移動物の3次元搬送経路を探索する3次元搬送経路探索装置であって、
前記移動物の移動経路に該移動物の位置誤差に基づく第1の幅を付与して得られる拡張移動経路、および、障害物の大きさの情報を含む3次元地図情報を記憶する記憶部と、
前記記憶部に記憶された前記拡張移動経路および前記3次元地図情報に基づいて、前記移動物および前記搬送物が前記障害物と衝突しない前記3次元搬送経路を生成する搬送経路探索部と、を備える3次元搬送経路探索装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の3次元搬送経路探索装置において、
前記第1の幅は、少なくとも前記移動物の移動経路の水平方向の位置誤差に基づき、前記水平方向の位置誤差を、前記移動経路を中心軸とする水平方向の幅に変換することで算出される、3次元搬送経路探索装置。
【請求項3】
請求項1に記載の3次元搬送経路探索装置において、
前記3次元地図情報に含まれる前記障害物の大きさの情報に対して、前記3次元地図情報の作成の際に生じる誤差、前記搬送物の振れ幅、および、前記移動物が前記拡張移動経路を進行する際の進行方向の位置誤差の少なくとも一つに基づく第2の幅を付与し、加工3次元地図情報を生成する3次元地図加工部をさらに備え、
前記搬送経路探索部は、前記3次元地図情報に代えて前記加工3次元地図情報に基づいて、前記3次元搬送経路を生成する、3次元搬送経路探索装置。
【請求項4】
請求項1に記載の3次元搬送経路探索装置において、
前記拡張移動経路は2次元平面上の拡張2次元移動経路であって、
前記搬送経路探索部は、
前記拡張2次元移動経路で前記移動物による搬送を搬送開始位置から搬送終了位置まで行わせた場合に前記拡張2次元移動経路に干渉している前記障害物と衝突せず、かつ、全体の搬送時間が最短となる上昇下降制御パターンを探索し、前記3次元搬送経路を生成する、
3次元搬送経路探索装置。
【請求項5】
請求項4に記載の3次元搬送経路探索装置において、
前記記憶部には、複数の上昇下降制御パターンがさらに記憶されており、
前記搬送経路探索部は、
前記拡張2次元移動経路で前記移動物による搬送を搬送開始位置から搬送終了位置まで行わせた場合に前記拡張2次元移動経路に干渉している前記障害物と衝突せず、かつ、全体の搬送時間が最短となる上昇下降制御パターンを、前記記憶部に記憶されている複数の上昇下降制御パターンから選択し、前記3次元搬送経路を生成する、
3次元搬送経路探索装置。
【請求項6】
請求項1に記載の3次元搬送経路探索装置において、
前記搬送経路探索部は、
前記拡張移動経路で前記移動物による搬送を搬送開始位置から搬送終了位置まで行わせた場合に前記障害物と衝突せず、かつ、全体の搬送時間が最短となる前記拡張移動経路を探索し、前記3次元搬送経路を生成する、3次元搬送経路探索装置。
【請求項7】
請求項1に記載の3次元搬送経路探索装置において、
前記移動物の前記移動経路は、可能最大速度で2次元平面を移動する最速移動経路であって、
前記搬送経路探索部は、前記最速移動経路に、前記第1の幅と、前記最速移動経路と前記移動物の実際の移動経路との差に基づく第3の幅とを付与して得られる第2の拡張移動経路に基づいて、前記3次元搬送経路を生成する、3次元搬送経路探索装置。
【請求項8】
請求項4または5に記載の3次元搬送経路探索装置において、
前記搬送経路探索部により生成された前記3次元搬送経路に基づく搬送距離情報と搬送位置情報とを出力する出力結果作成部をさらに備える、3次元搬送経路探索装置。
【請求項9】
データベースにそれぞれ記憶された、搬送物を搬送する移動物の移動経路に該移動物の位置誤差に基づく幅を付与して得られる拡張移動経路、および、障害物の大きさの情報を含む3次元地図情報に基づいて、前記移動物および前記搬送物が前記障害物と衝突しない3次元搬送経路を生成する、
3次元搬送経路探索方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、3次元搬送経路探索装置および3次元搬送経路探索方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
搬送物を搬送する装置(以下では、移動物と呼ぶことにする)としては、例えば、ドローンや天井クレーンなど種々の装置がある。3次元空間で移動物を移動したり移動物で搬送物を搬送したりする際に、事前にどのような搬送経路となるかを確認したり、フィードフォワード制御などで3次元方向の制御を事前に決定する場合がある。その場合、搬送開始前に3次元搬送経路を特定し、移動物や搬送物が経路上の障害物と干渉しないことを事前に確認するようにしている。
【0003】
例えば、特許文献1では、移動物の例として天井クレーンが記載されており、経路上を進行する際の搬送物と障害物との衝突を避けるために、搬送物または搬送経路上にある物体に対して所定の余裕空間を設定している。
【先行技術文献】
【特許文献】
【0004】
特開2014-178794号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、3次元搬送経路を特定する際には、以下のような誤差を考慮して3次元搬送経路を特定する必要がある。例えば、数値計算で求めた搬送経路には数値誤差がある。また、実機での搬送に対するノイズなどに起因する制御のずれによる誤差や、理論的最短搬送経路などの経路と実際の搬送とのずれなどによる誤差に加え、進行経路上での搬送物の振れ幅や、移動物が移動し得る経路上にある障害物の高さや位置情報の誤差などがある。
【0006】
上述した特許文献1には、搬送物の振れ幅を推定して余裕空間を設定することについては記載されている。しかしながら、その余裕空間には、上述したような移動物に誤差が考慮されておらず、搬送物と障害物との衝突の可能性を精度良く確認することができない。
【課題を解決するための手段】
【0007】
本発明の態様による3次元搬送経路探索装置は、搬送物を搬送する移動物の3次元搬送経路を探索する3次元搬送経路探索装置であって、前記移動物の移動経路に該移動物の位置誤差に基づく第1の幅を付与して得られる拡張移動経路、および、障害物の大きさの情報を含む3次元地図情報を記憶する記憶部と、前記記憶部に記憶された前記拡張移動経路および前記3次元地図情報に基づいて、前記移動物および前記搬送物が前記障害物と衝突しない前記3次元搬送経路を生成する搬送経路探索部と、を備える。
本発明の態様による3次元搬送経路探索方法は、データベースにそれぞれ記憶された、搬送物を搬送する移動物の移動経路に該移動物の位置誤差に基づく幅を付与して得られる拡張移動経路、および、障害物の大きさの情報を含む3次元地図情報に基づいて、前記移動物および前記搬送物が前記障害物と衝突しない3次元搬送経路を生成する。
【発明の効果】
【0008】
本発明によれば、衝突を回避できる3次元搬送経路の探索を行う際に移動物に関する誤差を考慮することで、精度の高い3次元搬送経路探索を行うことができる。
【図面の簡単な説明】
【0009】
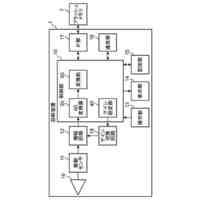
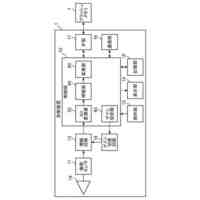
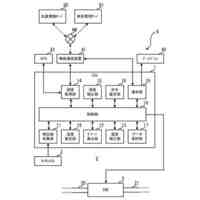
図1は、3次元搬送経路探索装置の機能的構成の一例を示すブロック図である。
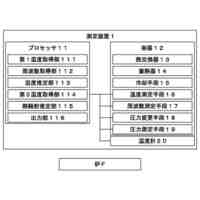
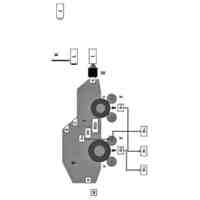
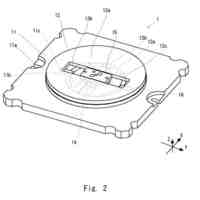
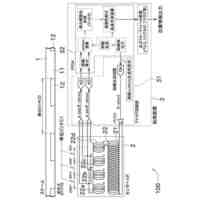
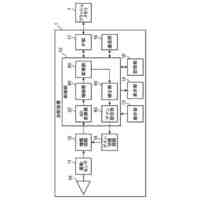
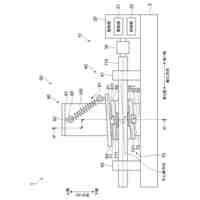
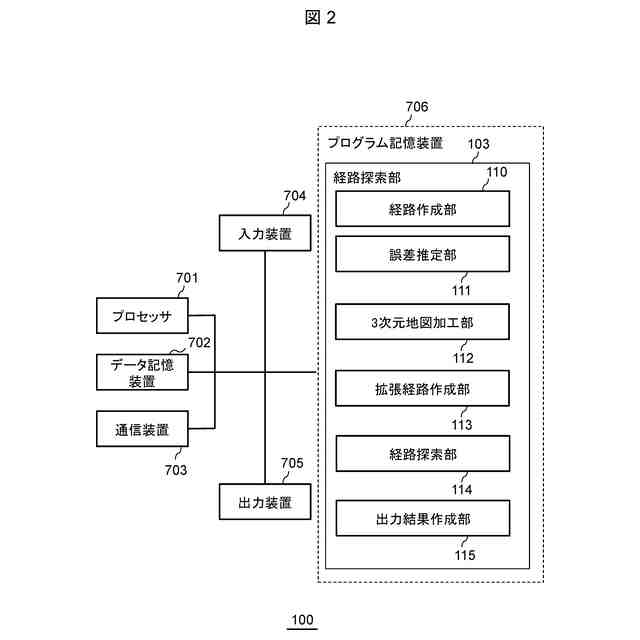
図2は、3次元搬送経路探索装置のハードウェア構成例を示す図である。
図3は、データベースに格納されているパラメータの一覧を示す図である。
図4は、移動物情報の具体例を示す図である。
図5は、誤差情報の具体例を示す図である。
図6は、搬送経路情報の具体例を示す図である。
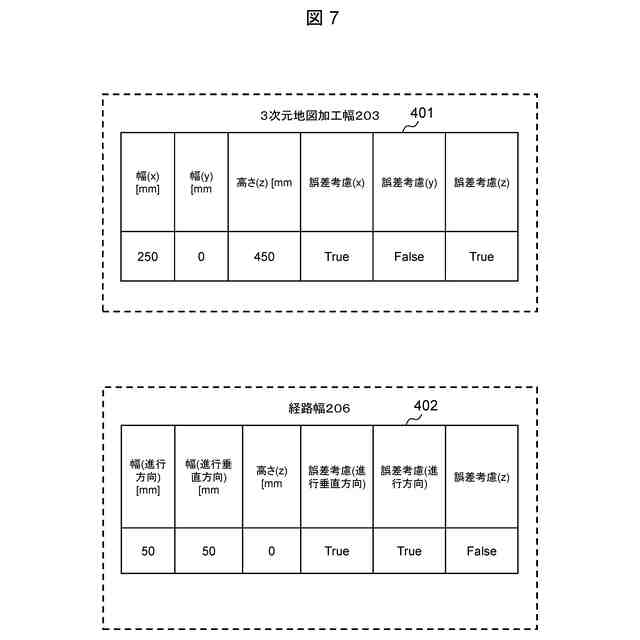
図7は、3次元加工幅および経路幅の具体例を示す図である。
図8は、拡張搬送経路情報の具体例を示す図である。
図9は、3次元搬送情報の具体例を示す図である。
図10は、3次元地図の具体例を示す図である。
図11は、加工3次元地図の具体例を示す図である。
図12は、3次元搬送距離情報の具体例を示す図である。
図13は、経路作成方法および上昇下降制御パターンの具体例を示す図である。
図14は、経路探索部における処理手順を示すフローチャートである。
図15は、ステップS803の詳細処理を示すフローチャートである。
図16は、ステップS804の詳細処理を示すフローチャートである。
図17は、ステップS805の詳細処理を示すフローチャートである。
図18は、ステップS806の詳細処理を示すフローチャートである。
図19は、ステップS807の詳細処理を示すフローチャートである。
図20は、ステップS808の詳細処理を示すフローチャートである。
図21は、実施例1における天井クレーン搬送の概略を示す模式図である。
図22は、2次元地図上に2次元の経路を記載した模式図である。
図23は、実施例1における3次元搬送距離情報を示す図である。
図24は、実施例1における2次元平面内の経路の出力例の一例を示す図である。
図25は、図24の拡張搬送経路を、移動物の進行方向を横軸とし高さを縦軸とした座標に示した図である。
図26は、実施例2におけるドローンによる搬送の概略を示す模式図である。
図27は、図26の3次元地図をxy平面に射影した2次元地図を示す図である。
図28は、実施例2における3次元搬送距離情報を示す図である。
図29は、実施例2における加工3次元地図と搬送経路とを示す図である。
【発明を実施するための形態】
【0010】
以下、図を参照して本発明を実施するための形態について説明する。以下の記載および図面は、本発明を説明するための例示であって、説明の明確化のため、適宜、省略および簡略化がなされている。また、以下の説明では、同一または類似の要素および処理には同一の符号を付し、重複説明を省略する場合がある。なお、以下に記載する内容はあくまでも本発明の実施の形態の一例を示すものであって、本発明は下記の実施の形態に限定されるものではなく、他の種々の形態でも実施する事が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オンキヨー株式会社
システム
8日前
個人
歩行者音声ガイドシステム
19日前
株式会社ヨコオ
検査治具
20日前
横河電機株式会社
光学プローブ
8日前
太陽誘電株式会社
検出装置
15日前
昭電工業株式会社
測定装置
21日前
太陽誘電株式会社
検出装置
1か月前
株式会社豊田自動織機
無人走行体
23日前
太陽誘電株式会社
検出装置
1か月前
大和製衡株式会社
重量選別機
13日前
キーコム株式会社
試験システム
26日前
キーコム株式会社
試験システム
26日前
株式会社ニシヤマ
物品取付装置
16日前
株式会社ニシヤマ
物品取付装置
16日前
トヨタ自動車株式会社
測定治具
23日前
村田機械株式会社
変位検出装置
23日前
株式会社東芝
センサ
今日
矢崎総業株式会社
センサ
15日前
三恵技研工業株式会社
レドーム
1か月前
大同特殊鋼株式会社
形状検出装置
15日前
TDK株式会社
磁気センサ
20日前
日本精工株式会社
軸受装置
1か月前
アズビル株式会社
オイル封入方法
1か月前
個人
氷河融雪水流出量の推定方法
7日前
株式会社シンカグループ
計測装置
1か月前
株式会社ミヤワキ
診断装置
1か月前
株式会社ミヤワキ
診断装置
1か月前
株式会社ミヤワキ
診断装置
1か月前
TDK株式会社
ガスセンサ
1か月前
TDK株式会社
ガスセンサ
1か月前
三菱マテリアル株式会社
温度センサ
8日前
日立Astemo株式会社
測定装置
1か月前
トヨタ自動車株式会社
劣化推定装置
16日前
三晶エムイーシー株式会社
試料容器
1日前
三菱マテリアル株式会社
温度センサ
16日前
株式会社不二越
X線測定装置
23日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ