TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024078845
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022191424
出願日
2022-11-30
発明の名称
車線推定装置および地図生成装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G01C
21/28 20060101AFI20240604BHJP(測定;試験)
要約
【課題】走行中の自車線を精度よく推定する車線推定装置を提供する。
【解決手段】車線推定装置は、自車両の周囲の外界状況を認識するカメラ1aと、カメラ1aにより認識された外界状況の情報に基づいて、自車両が走行する自車線を推定する車線推定部と、を備える。車線推定部(第1車線推定部171、パラメータ算出部172、第2車線推定部173)は、自車両が所定区間を走行するとき、所定時間毎に自車線を推定し、所定区間の走行完了後に、推定された自車線の頻度を表すパラメータを算出し、算出されたパラメータに基づいて所定区間内で自車両が走行した自車線を推定する。
【選択図】図5
特許請求の範囲
【請求項1】
自車両の周囲の外界状況を認識する外界認識部と、
前記外界認識部により認識された外界状況の情報に基づいて、自車両が走行する自車線を推定する車線推定部と、を備え、
前記車線推定部は、
自車両が所定区間を走行するとき、所定時間毎に自車線を推定し、前記所定区間の走行完了後に、推定された自車線の頻度を表すパラメータを算出し、算出された前記パラメータに基づいて前記所定区間内で自車両が走行した自車線を推定することを特徴とする車線推定装置。
続きを表示(約 800 文字)
【請求項2】
請求項1に記載の車線推定装置において、
前記外界認識部により認識される外界状況の情報は、区画線の有無および種別を表す区画線情報と、自車両の周辺を走行する周辺車両の有無および走行方向を表す周辺車両情報と、道路境界線から区画線までの距離を表す距離情報と、を含み、
前記車線推定部は、前記区画線情報と前記周辺車両情報と前記距離情報とに基づいて、前記所定時間毎に自車線を推定することを特徴とする車線推定装置。
【請求項3】
請求項1または2に記載の車線推定装置において、
情報を記憶する記憶部をさらに備え、
前記車線推定部は、自車両が、道なりに沿って設定された前記所定区間の始点から終点に至るまで、前記所定時間毎に自車線を推定するとともに、推定結果を前記記憶部に記憶し、自車両が前記終点に至ると、前記記憶部に記憶された情報に基づいて、自車線の頻度を表す前記パラメータを算出することを特徴とする車線推定装置。
【請求項4】
請求項1または2に記載の車線推定装置と、
前記車線推定装置に含まれる前記外界認識部により認識された外界状況に基づいて自車両の周辺の地図を生成する地図生成部と、を備えることを特徴とする地図生成装置。
【請求項5】
請求項4に記載の地図生成装置において、
前記地図生成部により生成された地図の情報を記憶する地図情報記憶部と、
前記地図情報記憶部に記憶された地図の情報に対応する、車線数の情報と車線の分岐および合流の情報とを含む道路地図情報を取得する情報取得部と、をさらに備え、
前記地図生成部は、前記地図情報記憶部に記憶された地図の情報に、前記情報取得部により取得された前記道路地図情報により特定される道路構造の情報を、付加することを特徴とする地図生成装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両が走行する走行車線を推定する車線推定装置および地図生成装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
この種の装置として、従来、車載カメラにより自車の現在の走行車線を区分する白線を抽出してその種別を認識し、自車両の走行車線を推定するようにした装置が知られている(例えば特許文献1参照)。特許文献1記載の装置では、自車両が白線を跨いだか否か、跨いだ白線の種別、及び地図データに含ませる分岐種別を用いて、分岐部において自車両の現在の走行車線を推定する。
【先行技術文献】
【特許文献】
【0003】
特開2010-221859号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、自車両が白線を跨いだか否かをカメラで認識できない場合があり、種々の走行環境のもとで走行車線を精度よく推定可能とすることが望ましい。
【課題を解決するための手段】
【0005】
本発明の一態様である車線推定装置は、自車両の周囲の外界状況を認識する外界認識部と、外界認識部により認識された外界状況の情報に基づいて、自車両が走行する自車線を推定する車線推定部と、を備える。車線推定部は、自車両が所定区間を走行するとき、所定時間毎に自車線を推定し、所定区間の走行完了後に、推定された自車線の頻度を表すパラメータを算出し、算出されたパラメータに基づいて所定区間内で自車両が走行した自車線を推定する。
【0006】
本発明の他の態様である地図生成装置は、上述した記載の車線推定装置と、車線推定装置に含まれる外界認識部により認識された外界状況に基づいて自車両の周辺の地図を生成する地図生成部と、を備える。
【発明の効果】
【0007】
本発明によれば、自車両が走行中における車線を精度よく推定することができる。
【図面の簡単な説明】
【0008】
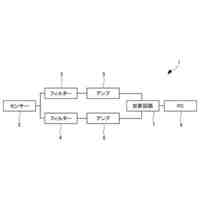
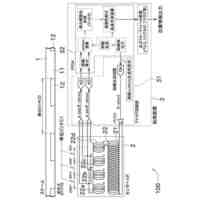
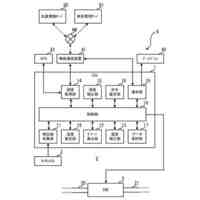
本発明の実施形態に係る地図生成装置を有する車両制御システムの全体構成を概略的に示すブロック図。
図1の地図生成部による地図生成の具体的な手順を示す図。
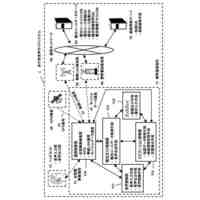
本発明の実施形態に係る車線推定装置が適用される走行シーンの一例を示す図。
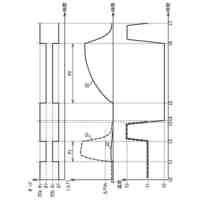
推定された車線の頻度の一例を示す図。
本発明の実施形態に係る地図生成装置の要部構成を示すブロック図。
第1の手法による車線推定を説明する図。
第2の手法による車線推定を説明する図。
第3の手法による車線推定を説明する図。
第3の手法による車線推定を説明する他の図。
走行環境が満たす複数の要件に対し、自車線を推定できる場合とできない場合とがあることを表形式で示す図。
車線パラメータの一例を示す図。
図5のコントローラで実行される処理の一例を示すフローチャート。
本実施形態に係る車線推定装置による動作の一例を示す図。
本実施形態に係る車線推定装置による動作の他の例を示す図。
【発明を実施するための形態】
【0009】
以下、図1~図10Bを参照して本発明の実施形態について説明する。本発明の実施形態に係る地図生成装置は、例えば自動運転機能を有する車両(自動運転車両)が走行するときに用いられる地図を生成するように構成される。なお、本実施形態に係る地図生成装置が設けられる車両を、他車両と区別して自車両と呼ぶことがある。
【0010】
地図生成装置による地図の生成は、ドライバが自車両を手動で運転するときに実行される。したがって、地図生成装置は、自動運転機能を有しない車両(手動運転車両)に設けることができる。地図生成装置は、手動運転車両だけでなく、ドライバによる運転操作が不要な自動運転モードからドライバの運転操作が必要な手動運転モードへの切換が可能な自動運転車両に設けることもできる。以下では、自動運転車両に地図生成装置が設けられるものとして地図生成装置に関する説明を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オンキヨー株式会社
システム
今日
横河電機株式会社
光学プローブ
今日
株式会社ヨコオ
検査治具
12日前
個人
歩行者音声ガイドシステム
11日前
太陽誘電株式会社
検出装置
7日前
株式会社豊田自動織機
無人走行体
15日前
昭電工業株式会社
測定装置
13日前
大和製衡株式会社
重量選別機
5日前
株式会社ニシヤマ
物品取付装置
8日前
キーコム株式会社
試験システム
18日前
株式会社ニシヤマ
物品取付装置
8日前
キーコム株式会社
試験システム
18日前
矢崎総業株式会社
センサ
7日前
トヨタ自動車株式会社
測定治具
15日前
村田機械株式会社
変位検出装置
15日前
TDK株式会社
磁気センサ
12日前
大同特殊鋼株式会社
形状検出装置
7日前
三菱マテリアル株式会社
温度センサ
8日前
トヨタ自動車株式会社
劣化推定装置
8日前
オムロン株式会社
スイッチング装置
18日前
株式会社不二越
X線測定装置
15日前
株式会社島津製作所
分析装置
7日前
三菱マテリアル株式会社
温度センサ
今日
株式会社ミツトヨ
光学式エンコーダ
13日前
東海電子株式会社
アルコール測定装置
今日
トヨタ自動車株式会社
空燃比算出装置
15日前
トヨタ自動車株式会社
電気機器
11日前
株式会社ダイヘン
異常検出装置
5日前
日本メクトロン株式会社
部品実装基板
18日前
株式会社フジキン
濃度測定装置
12日前
ミイシステム株式会社
非接触信号状態判定装置
11日前
株式会社幸和電熱計器
接触式温度センサ
13日前
栗田工業株式会社
異常音検出装置
21日前
株式会社不二越
X線回折測定装置
15日前
日本特殊陶業株式会社
ガスセンサ
12日前
株式会社和井田製作所
照明システム
13日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ