TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024077605
公報種別
公開特許公報(A)
公開日
2024-06-07
出願番号
2023192765
出願日
2023-11-13
発明の名称
ノブの取り付け構造及び電子機器
出願人
株式会社JVCケンウッド
代理人
個人
,
個人
,
個人
主分類
G05G
1/08 20060101AFI20240531BHJP(制御;調整)
要約
【課題】ノブが回転式電子部品のシャフトから抜けにくく、ノブが押し込まれても回転式電子部品の取り付け部分に不具合が生じにくいノブの取り付け構造を提供する。
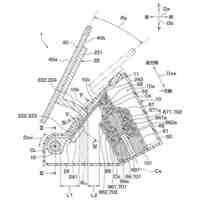
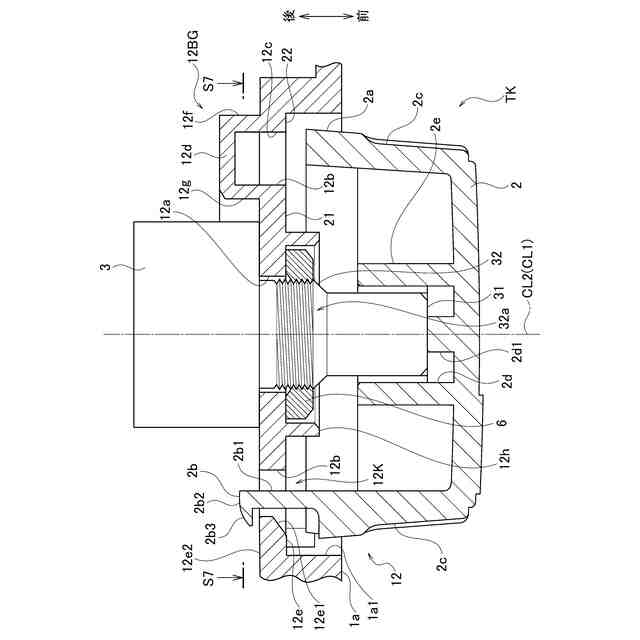
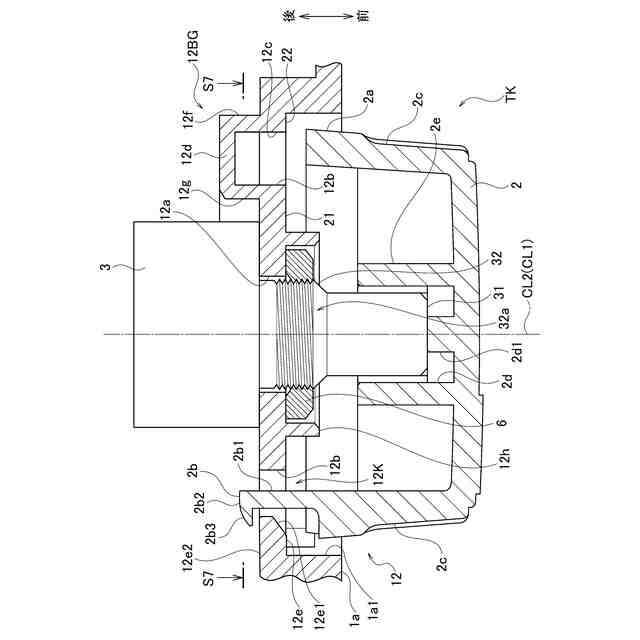
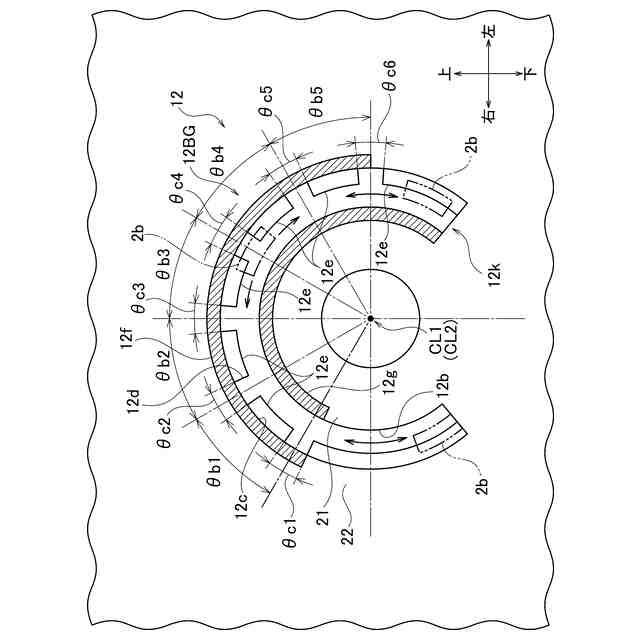
【解決手段】板状部材1aの貫通孔12aと、シャフト31が貫通孔12aから第1側に突出して板状部材1aの第1側とは反対側の第2側に取り付けられた回転式電子部品3と、板状部材1aに、シャフト31の軸線CL1を中心とする円弧状又は円環状に形成された爪用スリット12bと、爪用スリット12bの外側である外岸部22の第2側の面12e2に引っ掛かる突出部2b2を含んで板状部材1aに係合するよう形成された爪部2bを有するノブ2と、爪用スリット12bに対する内側の内島部21と外岸部22とを連結するアーチ部12dとを備える。
【選択図】図6
特許請求の範囲
【請求項1】
板状部材と、
前記板状部材に設けられた貫通孔と、
シャフトを有し、前記シャフトが、前記貫通孔から前記板状部材の第1の側に突出するように前記板状部材の前記第1の側とは反対側の第2の側に取り付けられた回転式電子部品と、
前記板状部材に、前記シャフトの軸線を中心とする円弧状又は円環状に形成された爪用スリットと、
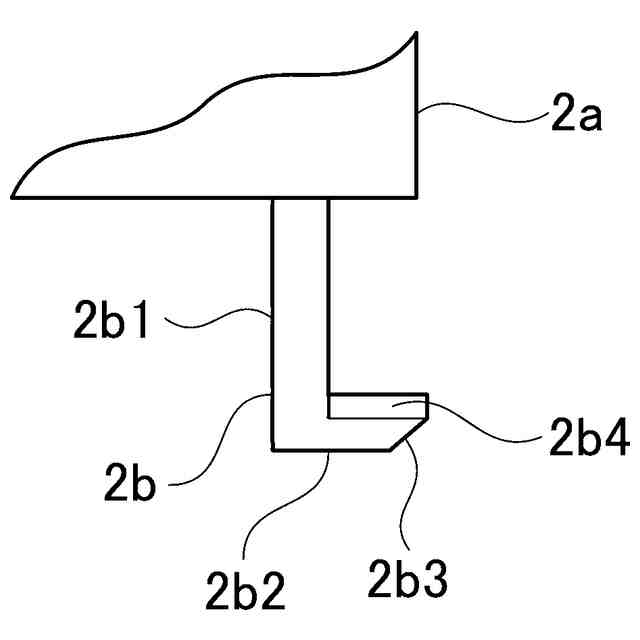
前記シャフトに対し前記第1の側から取り付けられ、前記爪用スリットに挿通する基部及び前記基部の先端において前記板状部材の前記爪用スリットの外側である外岸部における前記第2の側の面に引っ掛かる突出部を含んで前記板状部材に係合するよう形成された爪部を有するノブと、
前記爪用スリットに対する内側の内島部と、前記外岸部とを連結するアーチ部と、
を備えたノブの取り付け構造。
続きを表示(約 640 文字)
【請求項2】
前記爪用スリットにおいて、前記外岸部の内周壁から内方に突出する周リブ状の係合鍔部を有し、
前記爪部の前記突出部が、前記係合鍔部に引っ掛かって前記ノブの前記シャフトからの抜けが防止される請求項1記載のノブの取り付け構造。
【請求項3】
前記軸線の方向から見たときに、前記アーチ部が形成されている部分の前記係合鍔部は欠落しており、前記アーチ部の周方向の幅は前記突出部の幅よりも狭い請求項2記載のノブの取り付け構造。
【請求項4】
前記爪用スリットには、前記アーチ部が前記突出部の幅よりも大きい角度範囲で形成されてなく、かつ前記爪用スリットの幅が前記突出部を通過可能とされた基準開口部が設けられている請求項3記載のノブの取り付け構造。
【請求項5】
前記爪用スリットは前記円弧状に形成され、前記爪用スリットの形成範囲によって、前記ノブの回動可能範囲が規定されている請求項4記載のノブの取り付け構造。
【請求項6】
筐体と、
請求項1~5のいずれか1項に記載のノブの取り付け構造と、
を備え、
前記ノブの取り付け構造における板状部材が前記筐体であり、
前記爪用スリットが円弧状に形成されている場合に前記回転式電子部品はロータリーボリューム又はロータリースイッチであり、前記爪用スリットが円環状に形成されている場合に前記回転式電子部品はロータリーエンコーダである電子機器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ノブの取り付け構造及び電子機器に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1に、ノブを、ロータリーボリュームなどの回転式電子部品のシャフトに取り付ける構造が記載されている。特許文献1に記載された構造は、ノブに、操作板の取り付け孔の反対面に係合する爪部を設けることでノブがシャフトから抜けるのを防止する。
【先行技術文献】
【特許文献】
【0003】
特開2001-126589号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているノブの取り付け構造は、回転式電子部品が、操作板の背後に配置された別の部材に取り付けられているため、奥行が大きくなる。
そこで、同様の構造をコンパクトに形成すべく、回転式電子部品を操作板に取り付けようとした場合、操作板における回転式電子部品の取り付け部分を囲むように、ノブの爪部の通り道となる円弧状のスリットを形成する必要がある。
【0005】
この構成において、ノブを回す角度が大きい場合には、スリットの形成角度が大きくなり、回転式電子部品の取り付け部分は、わずかな角度範囲でのみ母材と連結した状態になるため、曲げ剛性が低下してしまう。
そのため、ノブを押し込む外力の大きさによっては、回転式電子部品の取り付け部分が破損するなどの不具合が生じる虞がある。
【0006】
そこで、本発明が解決しようとする課題は、コンパクトに形成でき、ノブが回転式電子部品のシャフトから抜けにくく、ノブが押し込まれても回転式電子部品の取り付け部分に不具合が生じにくいノブの取り付け構造及び電子機器を提供することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は次の1)、2)の構成を有する。
1) 板状部材と、
前記板状部材に設けられた貫通孔と、
シャフトを有し、前記シャフトが、前記貫通孔から前記板状部材の第1の側に突出するように前記板状部材の前記第1の側とは反対側の第2の側に取り付けられた回転式電子部品と、
前記板状部材に、前記シャフトの軸線を中心とする円弧状又は円環状に形成された爪用スリットと、
前記シャフトに対し前記第1の側から取り付けられ、前記爪用スリットに挿通する基部及び前記基部の先端において前記板状部材の前記爪用スリットの外側である外岸部における前記第2の側の面に引っ掛かる突出部を含んで前記板状部材に係合するよう形成された爪部を有するノブと、
前記爪用スリットに対する内側の内島部と、前記外岸部とを連結するアーチ部と、
を備えたノブの取り付け構造である。
2) 筐体と、
1)に記載のノブの取り付け構造と、
を備え、
前記ノブの取り付け構造における板状部材が前記筐体であり、
前記爪用スリットが円弧状に形成されている場合に前記回転式電子部品はロータリーボリューム又はロータリースイッチであり、前記爪用スリットが円環状に形成されている場合に前記回転式電子部品はロータリーエンコーダである電子機器である。
【発明の効果】
【0008】
本発明の一態様によれば、コンパクトに形成でき、ノブが回転式電子部品のシャフトから抜けにくく、ノブが押し込まれても回転式電子部品の取り付け部分に不具合が生じにくい、という効果が得られる。
【図面の簡単な説明】
【0009】
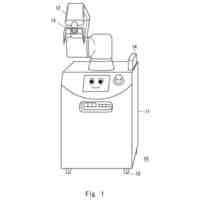
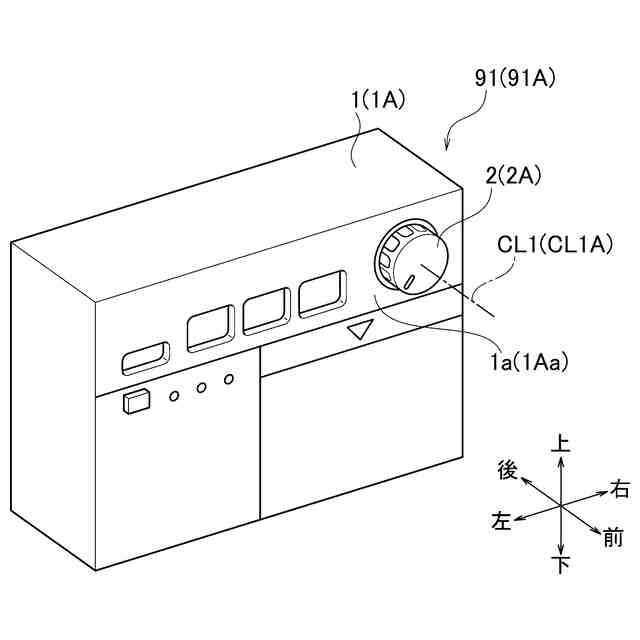
図1は、本発明の実施形態の第1態様に係る電子機器91を示す斜視図である。
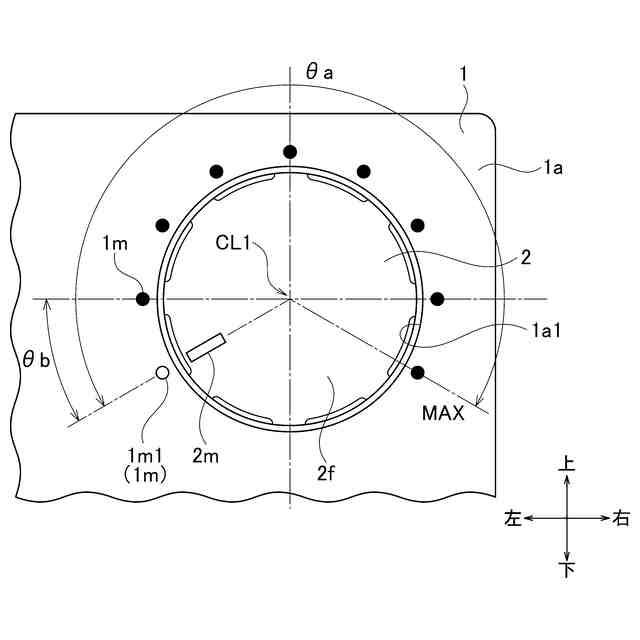
図2は、電子機器91のノブ2の近傍を示す部分前面図である。
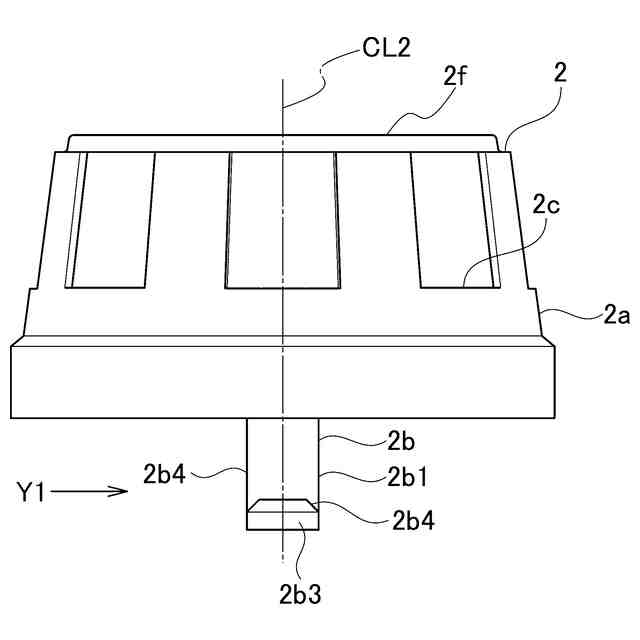
図3Aは、ノブ2の側面図である。
図3Bは、図3Aにおける矢視Y1図である。
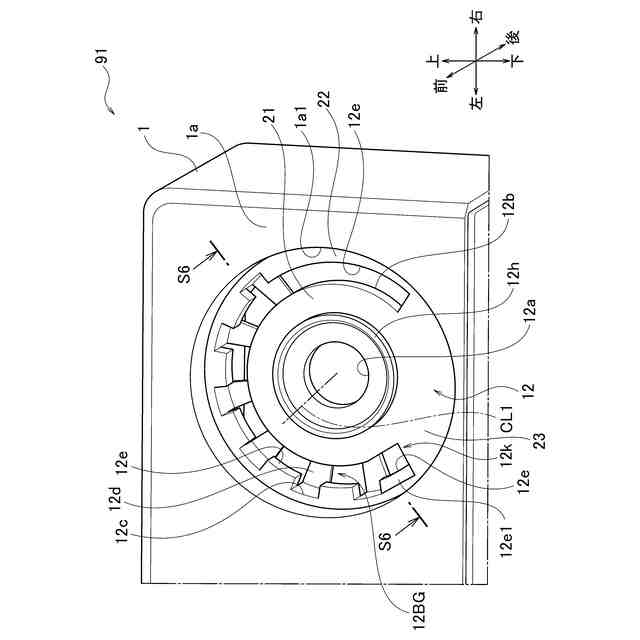
図4は、電子機器91の筐体1におけるノブ装着部12を前斜め右下方から見た斜視図である。
図5は、筐体1におけるノブ装着部12を後斜め左下方から見た斜視図である。
図6は、電子機器91の、図4におけるS6-S6位置に相当する位置での断面図である。
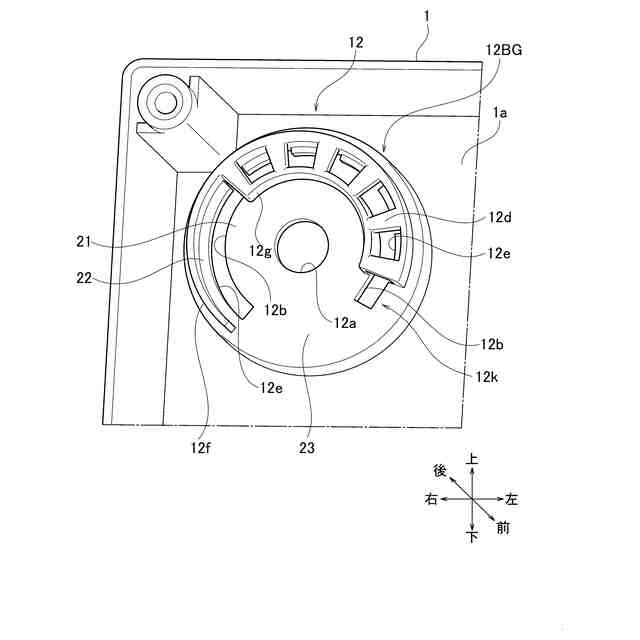
図7は、筐体1の、図6におけるS7-S7位置に相当する位置での断面図である。
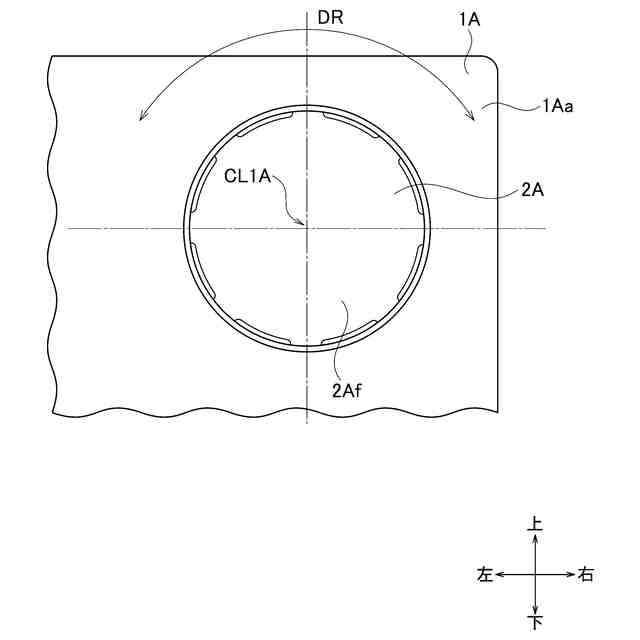
図8は、本発明の実施形態の第2態様に係る電子機器91Aのノブ2Aの近傍を示す部分前面図である。
図9は、電子機器91Aの筐体1Aにおけるノブ装着部12Aの前面図である。
図10は、筐体1Aにおけるノブ装着部12Aの後面図である。
図11は、図9におけるS11-S11位置での断面図である。
図12は、図11におけるS12-S12位置での断面図である。
【発明を実施するための形態】
【0010】
本発明の実施形態の第1態様であるノブの取り付け構造TK及びそれを備えた電子機器91を、実施例1として図1~図7を参照して説明する。また、第2態様であるノブの取り付け構造TKA及びそれを備えた電子機器91Aを、実施例2として図1及び図8~図12を参照して説明する。以下の説明において、上下左右前後の各方向を図1に示される矢印の方向で規定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
19日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
2か月前
ミネベアミツミ株式会社
入力装置
2か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
三菱電機株式会社
移動体制御装置
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社クボタ
故障診断装置
2か月前
マキノジェイ株式会社
工作機械
18日前
リックス株式会社
状態検出装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
岩田工機株式会社
加工装置
1か月前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
搬送車システム
2か月前
村田機械株式会社
無人搬送車システム
1か月前
オムロン株式会社
サポート装置およびサポート方法
18日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
電圧生成回路
16日前
横河電機株式会社
ロボット管理システム
26日前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
ペダル装置
18日前
シャープ株式会社
走行システム及び走行方法
1か月前
オークマ株式会社
工作機械の制御方法及び制御装置
4日前
多摩川精機株式会社
突入電流防止回路
2か月前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
丸北研磨株式会社
稼働状況管理システム
2日前
株式会社ディスコ
加工装置
2か月前
ローム株式会社
リニアレギュレータ
1か月前
アマノ株式会社
自律走行装置およびその妥当性評価方法
24日前
株式会社日立製作所
設備診断装置及び設備診断方法
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ