TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024076788
公報種別
公開特許公報(A)
公開日
2024-06-06
出願番号
2022188550
出願日
2022-11-25
発明の名称
サーボシステム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H02P
27/08 20060101AFI20240530BHJP(電力の発電,変換,配電)
要約
【課題】制御装置と、複数のサーボドライバとを含むサーボシステムにおいて、スイッチングに起因するノイズを抑制する。
【解決手段】制御装置と、複数のサーボドライバとを含み、該複数のサーボドライバのそれぞれは、該制御装置からの動作指令に従って複数のモータを同期制御可能に構成された、サーボシステムであって、複数のサーボドライバのそれぞれは、サーボ信号生成部と、パルス変調されたPWM制御信号を生成するPWM演算部と、インバータと、を備える。そして、PWM演算部は、サーボドライバ及びモータによる回路構成に関連して設定される所定パラメータを用いて、指令信号が低電圧領域に属する場合に複数のモータに対応する制御軸毎に異なる、指令信号に重畳させる重畳信号を生成する第1処理と、重畳信号を指令信号に加算して所定のキャリア信号と比較することで、PWM制御信号を生成する第2処理と、を実行するように構成される。
【選択図】図7
特許請求の範囲
【請求項1】
制御装置と、複数のサーボドライバとを含み、該複数のサーボドライバのそれぞれは、該制御装置からの動作指令に従って複数のモータを同期制御可能に構成された、サーボシステムであって、
前記複数のサーボドライバのそれぞれは、
前記動作指令に基づいて、対応する前記モータのための指令信号を生成するサーボ信号生成部と、
前記サーボ信号生成部によって生成された前記指令信号に基づいて、パルス変調されたPWM制御信号を生成するPWM演算部と、
前記PWM演算部によって生成された前記PWM制御信号に基づいてスイッチング素子をスイッチングすることで前記モータを駆動する駆動電圧を生成するインバータと、
を備え、
前記PWM演算部は、
前記サーボドライバ及び前記モータによる回路構成に関連して設定される所定パラメータを用いて、前記指令信号が低電圧領域に属する場合に前記複数のモータに対応する制御軸毎に異なる、前記指令信号に重畳させる重畳信号を生成する第1処理と、
前記重畳信号を前記指令信号に加算して所定のキャリア信号と比較することで、前記PWM制御信号を生成する第2処理と、
を実行するように構成される、
サーボシステム。
続きを表示(約 1,300 文字)
【請求項2】
前記所定パラメータは、前記インバータでのスイッチングノイズの大きさと継続時間に従って設定される、
請求項1に記載のサーボシステム。
【請求項3】
前記所定パラメータは、前記複数のモータに対応する制御軸毎に異なる値が設定される、
請求項1に記載のサーボシステム。
【請求項4】
前記PWM演算部は、前記モータの各相に対応する前記指令信号の値と、前記所定パラメータの値との大小を比較して抽出される、該指令信号の値と該所定パラメータの値の何れか一つに関連する所定値を、前記重畳信号に含ませることで前記第1処理を実行する、
請求項1から請求項3の何れか1項に記載のサーボシステム。
【請求項5】
前記モータは三相交流モータであって、
前記PWM演算部は、前記第1処理で、前記モータの各相に対応する前記指令信号の値と前記所定パラメータの値との中から最大値と最小値の少なくとも一方を抽出し、その抽出された値に関連する値を前記所定値とする、
請求項4に記載のサーボシステム。
【請求項6】
前記モータは三相交流モータであって、
前記PWM演算部は、前記第2処理で、二相変調方式によって前記PWM制御信号を生成し、
前記PWM演算部は、前記第1処理で、前記モータの各相に対応する前記指令信号における最大値及び最小値のそれぞれの絶対値の大小に基づいて、該モータの各相に対応する該指令信号の値と該所定パラメータの値との中から最大値又は最小値を抽出し、その抽出された値に関連する値を前記所定値とする、
請求項4に記載のサーボシステム。
【請求項7】
前記モータは三相交流モータであって、
前記PWM演算部は、前記第2処理で、二相変調方式によって前記PWM制御信号を生成し、
前記PWM演算部は、前記第1処理で、前記モータの各相に対応する前記指令信号及び前記所定パラメータにおける最大値及び最小値のそれぞれの絶対値の大小に基づいて、該モータの各相に対応する該指令信号の値と該所定パラメータの値との中から最大値又は最小値を抽出し、その抽出された値に関連する値を前記所定値とする、
請求項4に記載のサーボシステム。
【請求項8】
前記モータは三相交流モータであって、
前記重畳信号は、前記モータの各相に対応する前記指令信号の第3次高調波であって、
前記PWM演算部は、前記第1処理で、前記モータの各相に対応する前記指令信号の振幅値と前記所定パラメータの値の中から最大値を抽出し、その抽出された値に関連する値を、前記第3次高調波に含まれる前記所定値とする、
請求項4に記載のサーボシステム。
【請求項9】
前記所定パラメータの値は、時間経過とともに変動しない固定値である、
請求項1から請求項3の何れか1項に記載のサーボシステム。
【請求項10】
前記所定パラメータの値は、時間経過とともに変動する変動値である、
請求項1から請求項3の何れか1項に記載のサーボシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、サーボシステムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
工場等で用いられるロボットや設備機械には多くのモータが組み込まれ、各対象物のアクチュエータとして利用されている。一般に、上位の制御装置からの駆動指令に従ってモータの駆動電流を生成するドライバにおいて、PWM制御方式による電力変換が行われるインバータが備えられている。PWM制御方式では、モータの各相(例えば、三相モータの場合はU相、V相、W相)を流れる電流を疑似的に正弦波状に制御することで、モータから出力されるトルクを自在にコントロールすることができる。しかしインバータにおけるスイッチングに起因して種々のノイズが発生し、その低減が求められている。
【0003】
例えば、特許文献1では、モータが低駆動状態であると判断されたときに、ドライバにおけるキャリア信号との比較対象となる指令信号に、制御軸ごとに異なる信号を重畳させる構成が採用されている。当該構成により、インバータでのスイッチングのタイミングが制御軸毎にずれることになり、各軸で発生するノイズの重なり合いが抑制されることができる。また、特許文献2にも、ドライバにおいて、指令信号に所定の信号を重畳させたうえでキャリア信号と比較する構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許6528138号公報
特開2011-211777号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
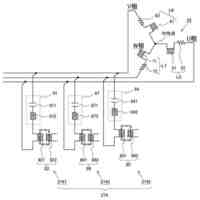
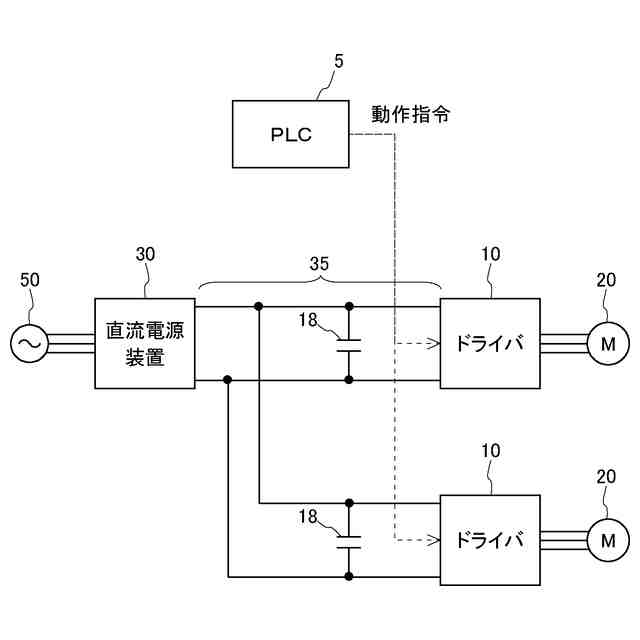
制御装置と、複数のサーボドライバ(以下、単に「ドライバ」ともいう)とを含むサーボシステムにおいて、各サーボドライバにより駆動されるモータについて同期制御を行う場合がある。その複数のモータの同期制御が行われている状態で、各制御軸に対応するドライバのインバータ(電力変換装置)におけるスイッチングのタイミングが重なってしまったり、もしくは極めて近いタイミングとなってしまったりした場合、各スイッチング制御に起因したノイズが大きくなり得る。
【0006】
特に、モータの駆動電圧が低い低駆動状態でスイッチングのタイミングが重なる傾向があることから、従来技術ではモータが低駆動状態であるか否かを判断した上で、ノイズ抑制のための信号重畳が行われている。しかし、このような判断処理を介する場合、判断処理にある程度の処理時間を要することから、モータの駆動状態の変化に応じた円滑なPWM制御が阻害されるおそれがある。
【0007】
本発明は、このような問題に鑑みてなされたものであり、制御装置と、複数のサーボドライバとを含むサーボシステムにおいて、スイッチングに起因するノイズの好適な抑制を図る技術の提供を目的とする。
【課題を解決するための手段】
【0008】
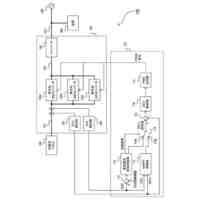
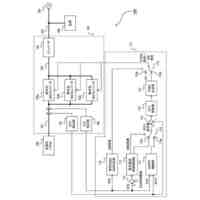
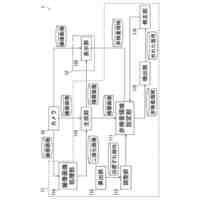
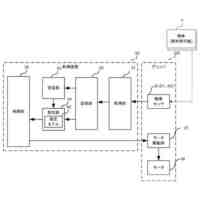
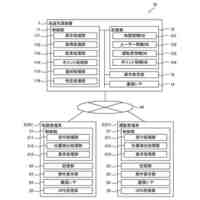
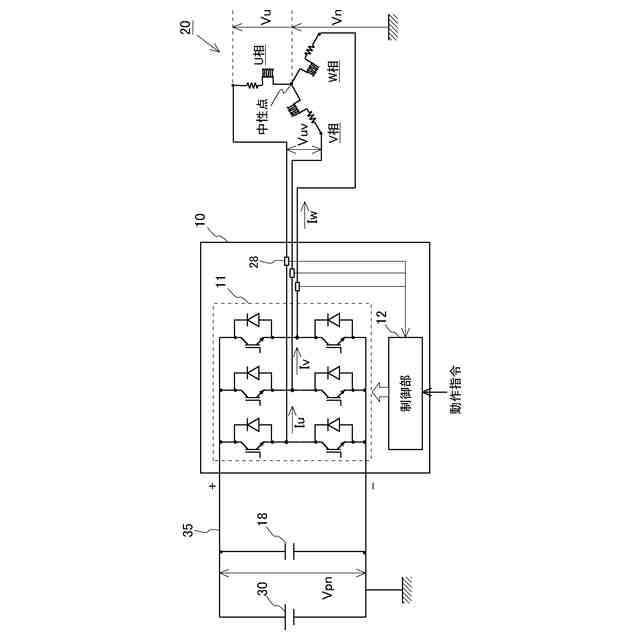
本願開示の一側面に係るサーボシステムは、制御装置と、複数のサーボドライバとを含み、該複数のサーボドライバのそれぞれは、該制御装置からの動作指令に従って複数のモータを同期制御可能に構成された、サーボシステムである。そして、前記複数のサーボド
ライバのそれぞれは、前記動作指令に基づいて、対応する前記モータのための指令信号を生成するサーボ信号生成部と、前記サーボ信号生成部によって生成された前記指令信号に基づいて、パルス変調されたPWM制御信号を生成するPWM演算部と、前記PWM演算部によって生成された前記PWM制御信号に基づいてスイッチング素子をスイッチングすることで前記モータを駆動する駆動電圧を生成するインバータと、を備える。更に、前記PWM演算部は、前記サーボドライバ及び前記モータによる回路構成に関連して設定される所定パラメータを用いて、前記指令信号が低電圧領域に属する場合に前記複数のモータに対応する制御軸毎に異なる、前記指令信号に重畳させる重畳信号を生成する第1処理と、前記重畳信号を前記指令信号に加算して所定のキャリア信号と比較することで、前記PWM制御信号を生成する第2処理と、を実行するように構成される。
【0009】
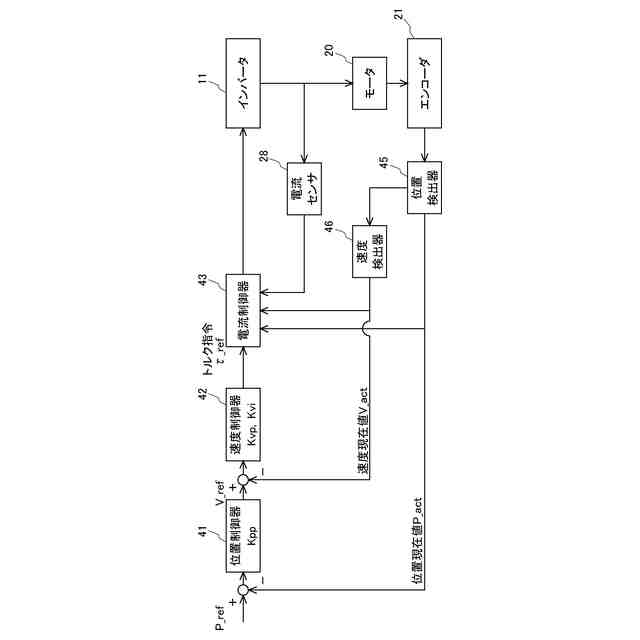
このように構成されるサーボシステムでは、複数のサーボドライバのそれぞれにおいて、サーボ信号生成部により制御装置からの動作指令に従ってモータを駆動するための指令信号が生成され、当該指令信号を基にしてPWM演算部より当該インバータを実際に駆動するためのPWM制御信号が生成され、当該PWM制御信号を基にしてインバータがモータを駆動するための駆動電圧を生成する。そして、当該サーボシステムでは、これらの複数のサーボドライバによって、対応するモータの同期制御が実行可能である。同期制御において、特に各制御軸のモータの動きが同じもしくは近い低電圧での駆動状態では、インバータでのスイッチングのタイミングが重なりやすくなり、ノイズの増大を招く可能性が高くなる。
【0010】
そこで、上記サーボシステムにおけるサーボドライバは、PWM演算部により第1処理と第2処理を行うように構成される。第1処理では、サーボドライバ及びモータによる回路構成に関連して設定される所定パラメータを用いて、指令信号に重畳させる重畳信号を生成する。当該所定パラメータは、制御軸毎に異なる値となるように設定されるのが好ましく、その結果、指令信号が低電圧領域に属する場合には当該重畳信号も制御軸毎に異なることとなる。なお、所定パラメータは、ノイズ発生の電気的要因である、モータの駆動電力が供給されるサーボドライバとモータによる電気的な回路構成を考慮して適宜設定される。所定パラメータは、ユーザにより任意の値に設定されてもよく、サーボドライバによって自動的に設定されてもよい。一方で、指令信号が低電圧領域に属しない場合には、ノイズ増大の可能性は抑えられるため、当該重畳信号の当初の目的を達成させるべく重畳信号は制御軸毎に異ならないのが好ましい。続いて、第2処理では、指令信号に重畳信号が加算されて、その加算後の信号が所定のキャリア信号と比較されることで、インバータを駆動するためのPWM制御信号が生成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
端子台
11日前
オムロン株式会社
モータ
3日前
オムロン株式会社
電気機器
11日前
オムロン株式会社
電気機器
4日前
オムロン株式会社
ソケット
11日前
オムロン株式会社
電磁継電器
3日前
オムロン株式会社
電磁継電器
3日前
オムロン株式会社
電力変換装置
3日前
オムロン株式会社
電力変換装置
3日前
オムロン株式会社
電動把持工具
10日前
オムロン株式会社
充放電システム
4日前
オムロン株式会社
トリガスイッチ
10日前
オムロン株式会社
非接触給電装置
3日前
オムロン株式会社
非接触給電装置
3日前
オムロン株式会社
非接触給電装置
3日前
オムロン株式会社
X線検査装置及びX線検査方法
10日前
オムロン株式会社
外観検査装置、及び外観検査方法
4日前
オムロン株式会社
外観検査装置、及び外観検査方法
3日前
オムロン株式会社
外観検査装置、及び外観検査方法
3日前
オムロン株式会社
情報処理装置および情報処理プログラム
3日前
オムロン株式会社
情報処理装置および情報処理プログラム
3日前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
11日前
オムロン株式会社
センサ装置及びセンサ装置を制御する方法
11日前
オムロン株式会社
充放電コネクタ用ホルダ及び充放電システム
4日前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
3日前
オムロン株式会社
動力伝達機構、関節機構及び多関節ロボット
11日前
オムロン株式会社
ホイールユニットおよびこれを備えたマウス
3日前
オムロン株式会社
サーボパラメータの調整方法、および調整装置
3日前
オムロン株式会社
磁性体コア、コイル部品、及び非接触給電システム
14日前
オムロン株式会社
解析装置、情報処理方法および情報処理プログラム
17日前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
3日前
オムロン株式会社
端末装置、端末装置に適用される方法及びプログラム
3日前
オムロン株式会社
情報処理装置、情報処理方法、及び情報処理プログラム
14日前
オムロン株式会社
分電盤
3日前
オムロン株式会社
文字入力装置、文字入力方法、および文字入力プログラム
11日前
オムロン株式会社
依頼支援システム、依頼支援方法、及び依頼支援プログラム
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ