TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024126401
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023034757
出願日
2023-03-07
発明の名称
サーボパラメータの調整方法、および調整装置
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H02P
29/00 20160101AFI20240912BHJP(電力の発電,変換,配電)
要約
【課題】対象装置における周波数特性の変動を可及的に考慮して好適なサーボパラメータの調整を実現する。
【解決手段】モータのサーボ制御に関連するサーボパラメータを調整する方法であって、
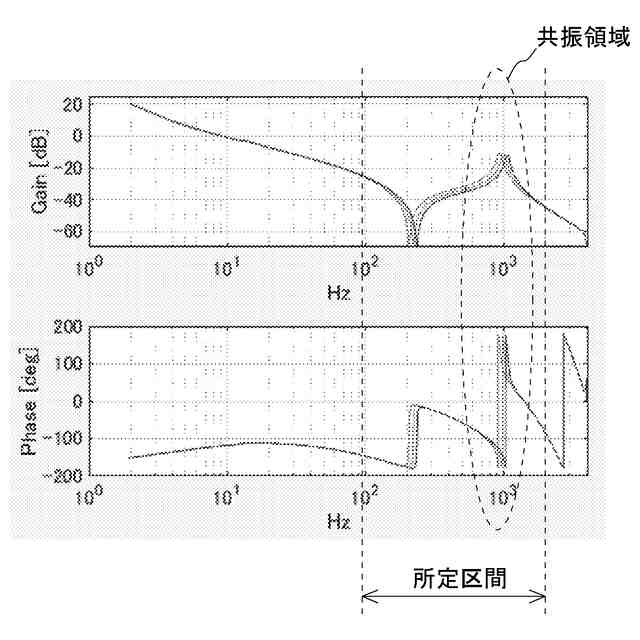
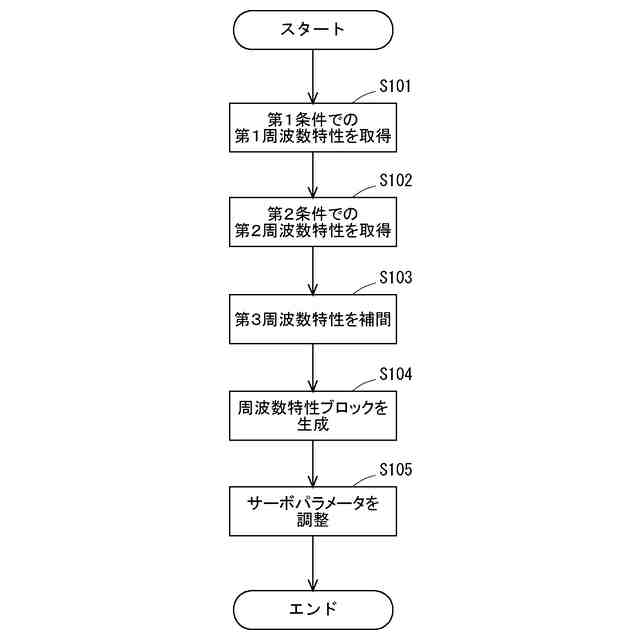
モータが取り付けられている対象装置において、該モータの周波数特性に関連する、異なる第1条件及び第2条件を少なくとも含む特性取得条件のそれぞれで、該モータの周波数特性を取得する第1ステップと、第1条件に対応する第1周波数特性と第2条件に対応する第2周波数特性とに基づいて、共振領域に関連する所定区間に対応する周波数特性である第3周波数特性を補間する第2ステップと、第1周波数特性と、第2周波数特性と、第3周波数特性とに基づいて、サーボパラメータの調整のための基準となる周波数特性ブロックを生成する第3ステップと、周波数特性ブロックに基づいて、サーボパラメータを調整する第4ステップと、を含む。
【選択図】図6
特許請求の範囲
【請求項1】
モータのサーボ制御に関連するサーボパラメータを調整する方法であって、
前記モータが取り付けられている対象装置において、該モータの周波数特性に関連する、異なる第1条件及び第2条件を少なくとも含む特性取得条件のそれぞれで、該モータの周波数特性を取得する第1ステップと、
前記第1条件に対応する第1周波数特性と前記第2条件に対応する第2周波数特性とに基づいて、前記モータの周波数特性における共振領域に関連する所定区間に対応する周波数特性である第3周波数特性を補間する第2ステップと、
前記第1周波数特性と、前記第2周波数特性と、前記第3周波数特性とに基づいて、前記サーボパラメータの調整のための基準となる周波数特性ブロックを生成する第3ステップと、
前記周波数特性ブロックに基づいて、前記サーボパラメータを調整する第4ステップと、
を含む、サーボパラメータの調整方法。
続きを表示(約 2,100 文字)
【請求項2】
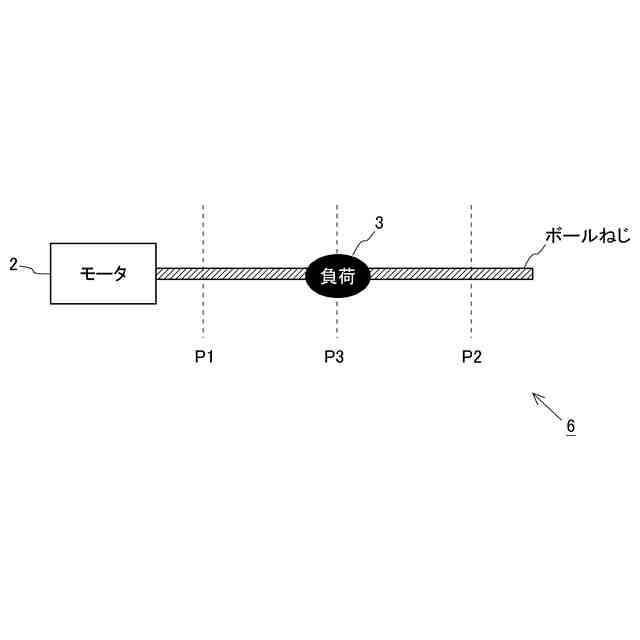
前記対象装置において前記モータにより駆動される負荷の可動範囲が有限の範囲に限定される場合、前記特性取得条件は、該可動範囲における該負荷の位置に関する条件である、
請求項1に記載のパラメータ調整方法。
【請求項3】
前記第1条件は、該負荷が該可動範囲において一方の端部に位置するときの位置条件であり、前記第2条件は、該負荷が該可動範囲における他方の端部に位置するときの位置条件である、
請求項2に記載のパラメータ調整方法。
【請求項4】
前記特性取得条件は、前記対象装置と仕様が同一の装置群における装置の稼働期間に関する条件であって、
前記第1条件と前記第2条件は、前記装置群において稼働期間の異なる第1の装置と第2の装置のそれぞれの稼働期間に係る条件である、
請求項1に記載のパラメータ調整方法。
【請求項5】
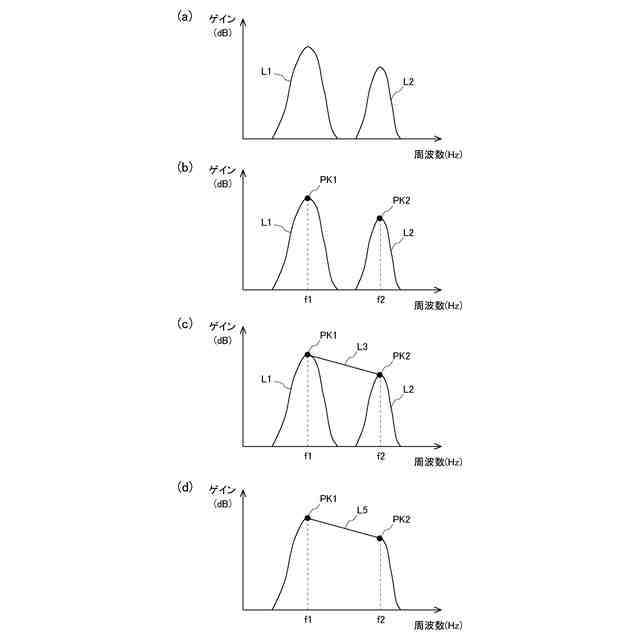
前記周波数特性は、ゲインに関する特性を含み、
前記第2ステップでは、
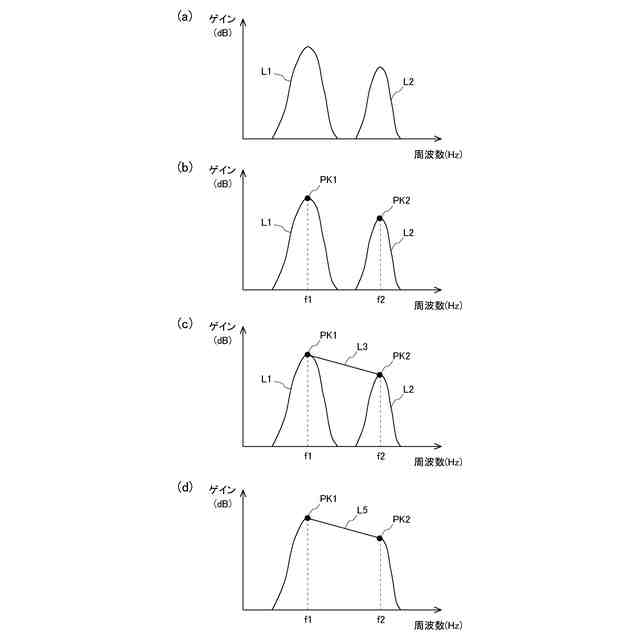
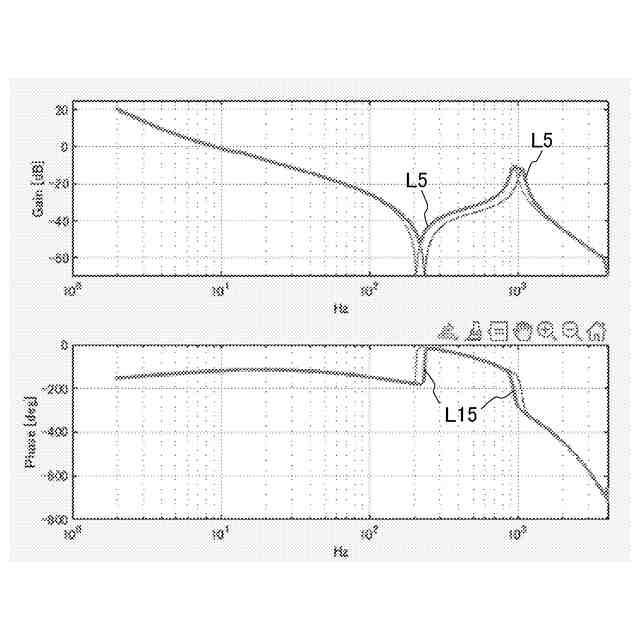
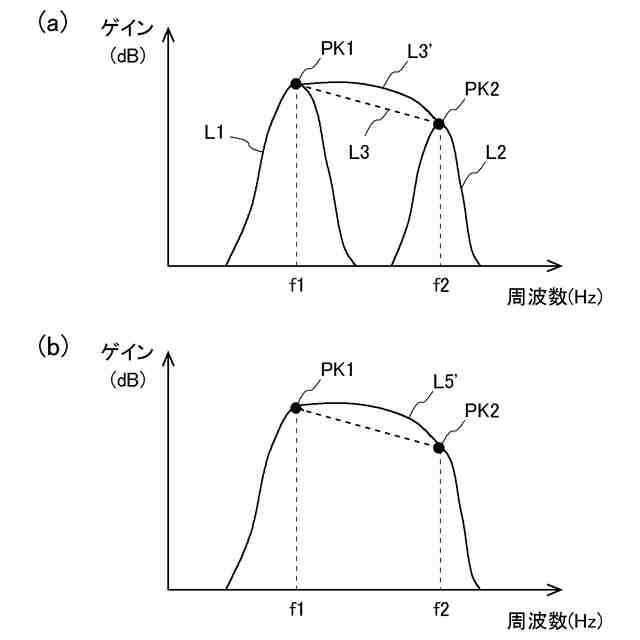
前記第1周波数特性のゲイン推移における共振に係る第1ピークと、前記第2周波数特性のゲイン推移における共振に係る第2ピークとを抽出し、
前記第1ピークに対応する第1周波数と前記第2ピークに対応する第2周波数との間の区間を前記所定区間として、該第1ピークと該第2ピークとを直線補間することで前記第3周波数特性を生成し、
前記第3ステップでは、
前記第1周波数特性のゲイン推移と前記第2周波数特性のゲイン推移と前記第3周波数特性のゲイン推移とから各周波数における最大ゲイン推移を前記周波数特性ブロックとして生成する、
請求項1から請求項4の何れか1項に記載のパラメータ調整方法。
【請求項6】
前記周波数特性は、位相に関する特性を更に含み、
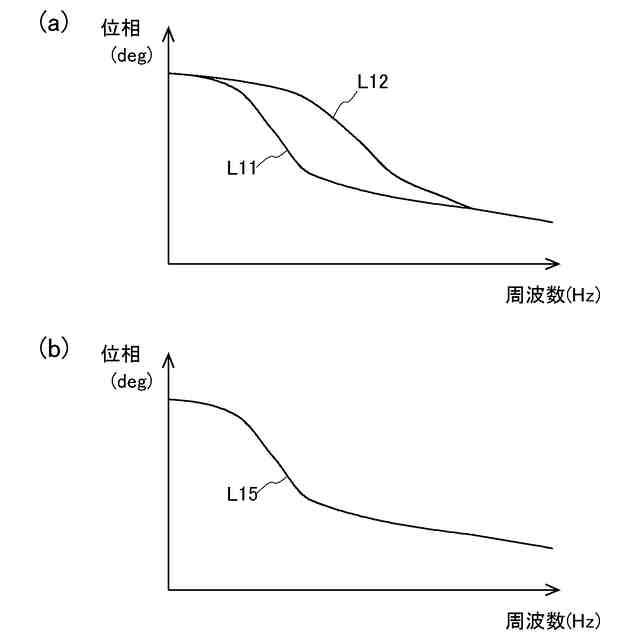
前記第3ステップでは、更に、前記第1周波数特性の位相推移と前記第2周波数特性の位相推移とから各周波数における最小位相推移を生成し該最小位相推移を前記周波数特性ブロックに含める、
請求項5に記載のパラメータ調整方法。
【請求項7】
前記周波数特性は、ゲインに関する特性を含み、
前記第2ステップでは、
前記第1周波数特性のゲイン推移における共振に係る第1ピークと、前記第2周波数特性のゲイン推移における共振に係る第2ピークとを抽出し、
前記第1ピークに対応する第1周波数と前記第2ピークに対応する第2周波数との間の区間を前記所定区間として、該第1ピークと該第2ピークとを直線補間した基準ゲイン推移よりゲインが大きくなるように補間することで前記第3周波数特性を生成し、
前記第3ステップでは、
前記第1周波数特性のゲイン推移と前記第2周波数特性のゲイン推移と前記第3周波数特性のゲイン推移とから各周波数における最大ゲイン推移を前記周波数特性ブロックとして生成する、
請求項1から請求項4の何れか1項に記載のパラメータ調整方法。
【請求項8】
前記周波数特性は、位相に関する特性を更に含み、
前記第3ステップでは、更に、前記第1周波数特性の位相推移と前記第2周波数特性の位相推移とから各周波数における最小位相推移を生成し該最小位相推移を前記周波数特性ブロックに含める、
請求項7に記載のパラメータ調整方法。
【請求項9】
前記周波数特性は、ゲインに関する特性を含み、
前記第1ステップでは、前記第1条件及び前記第2条件とは異なる追加条件でも、前記モータの周波数特性を追加周波数特性として取得し、
前記第2ステップでは、
前記第1周波数特性のゲイン推移における共振に係る第1ピークと、前記第2周波数特性のゲイン推移における共振に係る第2ピークと、前記追加周波数特性のゲイン推移における共振に係る追加ピークと、を抽出し、
前記第1ピーク、前記第2ピーク、前記追加ピークに基づいて前記所定区間を決定し、該所定区間において該第1ピーク、該第2ピーク、該追加ピークを下回らないように補間することで前記第3周波数特性を生成し、
前記第3ステップでは、
前記第1周波数特性のゲイン推移と前記第2周波数特性のゲイン推移と前記第3周波数特性のゲイン推移とから各周波数における最大ゲイン推移を前記周波数特性ブロックとして生成する、
請求項1から請求項4の何れか1項に記載のパラメータ調整方法。
【請求項10】
前記周波数特性は、ゲインに関する特性を含み、
前記第2ステップでは、少なくとも第1区間と第2区間を含む複数の前記所定区間を特定し、該複数の所定区間のそれぞれにおいて前記第3周波数特性を補間し、
前記第3ステップでは、前記第1周波数特性と、前記第2周波数特性と、前記複数の所定区間のそれぞれに対応する前記第3周波数特性とに基づいて、前記周波数特性ブロックを生成する、
請求項1から請求項4の何れか1項に記載のパラメータ調整方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、サーボパラメータの調整方法、および調整装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
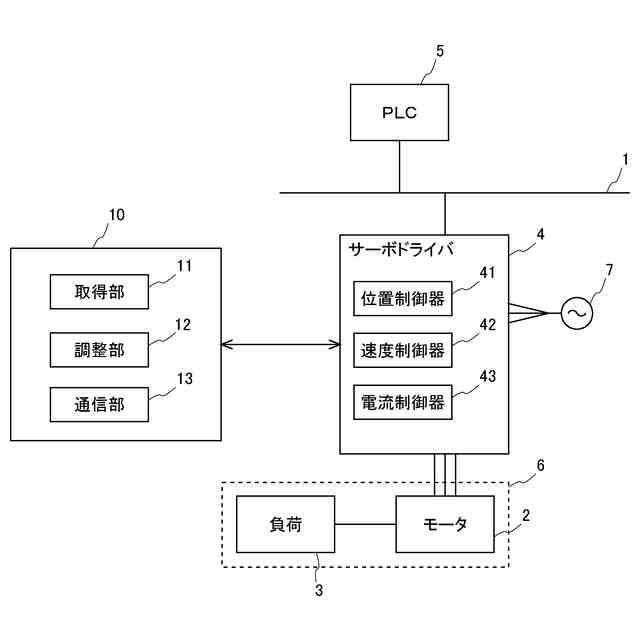
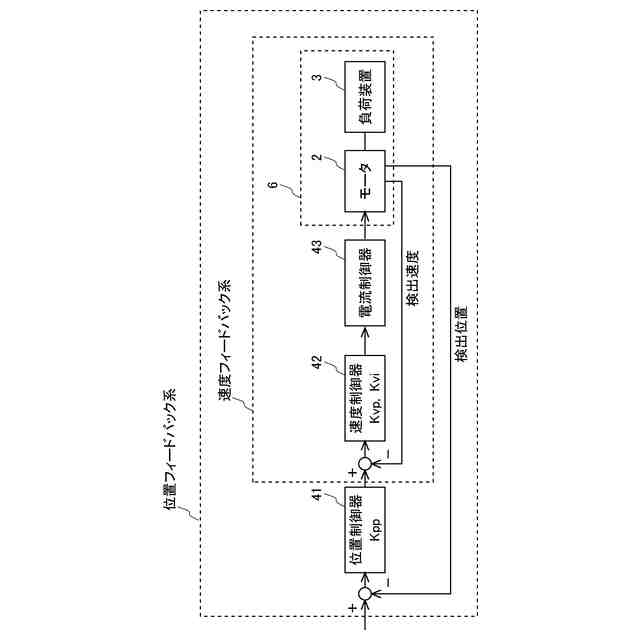
負荷を駆動するためのモータ等が取り付けられた設備装置においては、一般的に、モータを適切にサーボ制御するために、サーボドライバのサーボパラメータ(位置ゲイン、速度ゲイン、フィルタのカットオフ周波数等)の調整が行われる。そして、このようなサーボパラメータの調整方法としては、一般的には、モータや負荷装置を実際に駆動することにより行われる調整方法が採用される。そこでは、サーボドライバ等のモータ制御装置にサーボパラメータを設定するとともに、そのサーボパラメータに応じたモータの周波数応答等を計測し、当該サーボパラメータの適否を判断することでサーボパラメータの調整が行われる。
【0003】
例えば、特許文献1に示す先行技術では、複数の異なる条件下で取得したモータの周波数特性に含まれるゲイン及び位相の推移に基づいて最大ゲイン包絡線と最小位相包絡線を算出し、それらを利用してサーボパラメータの調整が行われる。また、特許文献2では、モータが組み込まれる装置の負荷状態によって変化する共振周波数を1つの共振周波数と考えて、共振による振動を抑制するためのノッチフィルタの中心周波数を探索する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2009-282609号公報
特開2007-185014号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般的に、モータをサーボ制御するためのサーボパラメータを調整するためには、実際にモータや負荷等を含む対象装置の制御軸において、対応するモータを駆動させてその周波数特性等を計測し、その計測結果に基づいて好適なサーボパラメータを探っていく。このような手法でサーボパラメータを調整した場合、対象装置が所望の周波数特性を示している状態では好適な制御特性が期待できる。しかし、対象装置においては、負荷位置の変化や経時的な要因等によって対象装置の機械剛性等の機械的な特性に変動が生じ、以てその機械内部の構造的な状況は必ずしも常に一定ではない。そのため、対象装置を特定の状態に置いて所望の周波数特性が発揮されるようにサーボパラメータを調整したとしても、対象装置が当該特定の状態から外れた場合、モータの制御状態が不安定なものとなり得る。
【0006】
また、対象装置は、一又は複数の制御軸を有しているため、当該装置が稼働時に置かれる状況は様々であり、あらゆる状況を想定して各制御軸での周波数特性を計測してサーボパラメータを調整するには多大な時間を要してしまい、作業効率の観点からも必ずしも好ましいものではない。
【0007】
本発明は、このような問題に鑑みてなされたものであり、対象装置における周波数特性の変動を可及的に考慮して好適なサーボパラメータの調整を実現する技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一側面に係るサーボパラメータの調整方法は、モータのサーボ制御に関連するサーボパラメータを調整する方法であって、前記モータが取り付けられている対象装置において、該モータの周波数特性に関連する、異なる第1条件及び第2条件を少なくとも含む特性取得条件のそれぞれで、該モータの周波数特性を取得する第1ステップと、前記第1条件に対応する第1周波数特性と前記第2条件に対応する第2周波数特性とに基づいて、前記モータの周波数特性における共振領域に関連する所定区間に対応する周波数特性である第3周波数特性を補間する第2ステップと、前記第1周波数特性と、前記第2周波数特性と、前記第3周波数特性とに基づいて、前記サーボパラメータの調整のための基準となる周波数特性ブロックを生成する第3ステップと、前記周波数特性ブロックに基づいて、前記サーボパラメータを調整する第4ステップと、を含む。
【0009】
上記調整方法は、対象装置の制御軸を駆動するためのモータのサーボ制御に関連するサーボパラメータを調整するための方法である。サーボパラメータとしては、当該制御軸に対応する、位置ループゲイン、速度ループゲインや、振動抑制のためのフィルタに関連するパラメータ(カットオフ周波数等)等が例示できる。例えば、周波数特性から把握できるゲインの乱れ(制御帯域付近のピークゲインや共振点等)を抑えるように、所定のサーボパラメータが調整される。
【0010】
ここで、第1ステップでは、サーボパラメータの調整を行う際に参照される周波数特性が取得される。当該周波数特性としては、いわゆるボード線図に示されるゲイン推移や位相推移等が例示できる。そして、制御軸でのモータの周波数特性を取得する際の、対象装置に関する条件は特性取得条件とされ、第1ステップにおいては、当該特性取得条件として少なくとも2つの条件である第1条件と第2条件とが設定される。これらの条件は、異なる周波数特性が見込まれる条件であり、好ましくは、両条件に対応する周波数特性(第1周波数特性と第2周波数特性)は、当該制御軸における周波数特性の変動範囲において境界的な特性であり、第1条件と第2条件はその境界的な特性に対応する境界条件である。境界条件は、位置的な条件や時間的な条件であってもよく、またそれ以外の条件であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
モータ
今日
オムロン株式会社
端子台
8日前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
電気機器
1日前
オムロン株式会社
ソケット
8日前
オムロン株式会社
電気機器
8日前
オムロン株式会社
検査装置
23日前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
電磁継電器
今日
オムロン株式会社
センサ装置
1か月前
オムロン株式会社
電磁継電器
今日
オムロン株式会社
電動把持工具
7日前
オムロン株式会社
電力変換装置
今日
オムロン株式会社
電力変換装置
今日
オムロン株式会社
粒子計測装置
1か月前
オムロン株式会社
粒子計測装置
1か月前
オムロン株式会社
トリガスイッチ
7日前
オムロン株式会社
非接触給電装置
今日
オムロン株式会社
非接触給電装置
今日
オムロン株式会社
非接触給電装置
今日
オムロン株式会社
充放電システム
1日前
オムロン株式会社
トリガスイッチ
1か月前
オムロン株式会社
生体情報処理方法
1か月前
オムロン株式会社
自律作業システム
22日前
オムロン株式会社
生体情報処理システム
1か月前
オムロン株式会社
経路情報提供システム
17日前
オムロン株式会社
検出装置および操作装置
21日前
オムロン株式会社
操作装置及び操作システム
1か月前
オムロン株式会社
装置、温調システムおよび方法
29日前
オムロン株式会社
X線検査装置及びX線検査方法
7日前
オムロン株式会社
方法、プログラム、および、装置
1か月前
オムロン株式会社
外観検査装置、及び外観検査方法
今日
オムロン株式会社
外観検査装置、及び外観検査方法
今日
オムロン株式会社
方法、プログラム、および、装置
1か月前
オムロン株式会社
外観検査装置、及び外観検査方法
1日前
オムロン株式会社
制御装置、制御方法及びプログラム
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ