TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024064012
公報種別
公開特許公報(A)
公開日
2024-05-14
出願番号
2022172279
出願日
2022-10-27
発明の名称
建設機械の掘削位置特定システムと掘削位置特定方法
出願人
大成建設株式会社
,
株式会社演算工房
代理人
個人
,
個人
主分類
G01C
15/00 20060101AFI20240507BHJP(測定;試験)
要約
【課題】建設機械のオペレータが自ら、随時変化し得る建設機械の掘削位置を都度精度よく、効率的に特定しながら掘削でき、アタリ部や余掘り部の発生を抑制できる、建設機械の掘削位置特定システムと掘削位置特定方法を提供する。
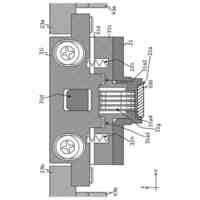
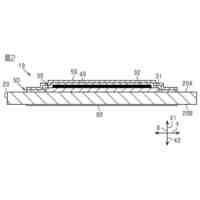
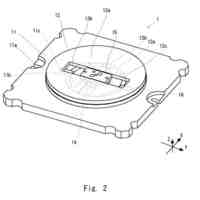
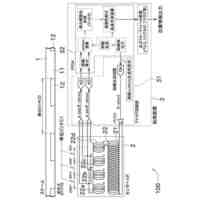
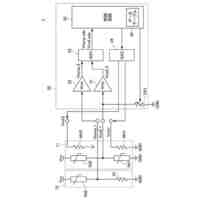
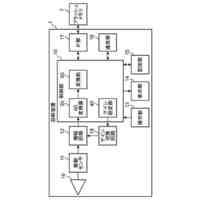
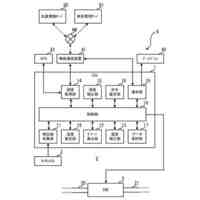
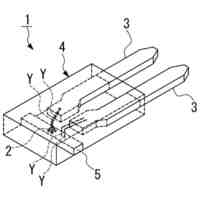
【解決手段】掘削機17が装着されている作業装置16が、走行台車11における取り付け位置15に取り付けられている建設機械10において掘削位置17aを特定する、掘削位置特定システム100であり、作業装置16のロール角とピッチ角とヨー角を検出して作業装置16の方向角を特定する3軸慣性センサ21と、複数の視準ターゲット30と、建設機械10の移動に伴って移動する視準ターゲット30を自動追尾して基準点座標に基づいて視準ターゲット30の3次元座標を測定する1台の測量機40と、3軸慣性センサ21による検出データと測量機40による測量データとに基づいて掘削位置を特定する制御装置50とを有する。
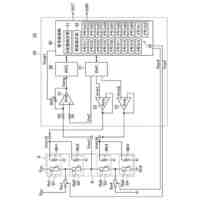
【選択図】図2
特許請求の範囲
【請求項1】
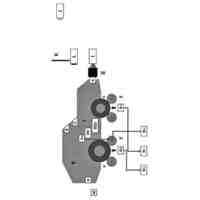
先端に掘削機が装着されている作業装置が、走行台車における取り付け位置に旋回自在に取り付けられている、建設機械において、該掘削機の掘削位置を特定する、建設機械の掘削位置特定システムであって、
前記取り付け位置に設けられて、前記作業装置のロール角とピッチ角とヨー角を検出して、該作業装置の方向角を特定する、3軸慣性センサと、
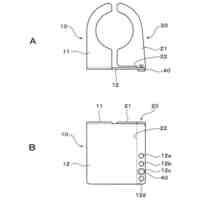
前記建設機械に設置される複数の視準ターゲットと、
前記建設機械の移動に伴って移動する少なくとも1つの前記視準ターゲットを自動追尾して、3次元座標が既知の基準点座標に基づいて該視準ターゲットの3次元座標を測定する、1台の測量機と、
前記3軸慣性センサによる検出データと前記測量機による測量データとに基づいて前記掘削位置を特定する、制御装置とを有することを特徴とする、建設機械の掘削位置特定システム。
続きを表示(約 2,100 文字)
【請求項2】
前記3軸慣性センサは、3軸加速度センサと3軸ジャイロセンサを備えていることを特徴とする、請求項1に記載の建設機械の掘削位置特定システム。
【請求項3】
前記作業装置が複数の関節を備え、各関節には、少なくともピッチ角を測定する1軸以上の加速度センサが設けられていることを特徴とする、請求項1又は2に記載の建設機械の掘削位置特定システム。
【請求項4】
前記制御装置は、第1制御と第2制御を実行し、
前記第1制御は、
前記建設機械が掘削施工している際に、前記測量機に対して1つの前記視準ターゲットを視準させる制御を実行してターゲット座標を取得し、該ターゲット座標に関する測量データと、前記3軸慣性センサによる検出データとに基づいて前記掘削機の掘削位置を特定する制御であり、
前記第2制御は、
前記建設機械が停止している際に、前記測量機に対して前記複数の視準ターゲットを順に視準させる制御を実行し、各視準ターゲットに固有の複数のターゲット座標を取得し、該複数のターゲット座標に関する測量データに基づいて前記建設機械および/または前記作業装置の新たな方向角を特定し、前記3軸慣性センサに対して該新たな方向角を与える制御であることを特徴とする、請求項1又は2に記載の建設機械の掘削位置特定システム。
【請求項5】
前記複数の視準ターゲットは、前記測量機による視準の可不可を実行する、視準可不可手段を備えており、
前記制御装置は、
前記第1制御において、前記複数の視準ターゲットのうちの1つの該視準ターゲットのみを視準可とし、他の該視準ターゲットを視準不可とする制御をさらに実行し、
前記第2制御において、前記複数の視準ターゲットが1基ずつ順に視準されるように、1つの視準ターゲットのみを視準可とし、他の該視準ターゲットを視準不可とし、次に、視準可の該視準ターゲットを視準不可とし、視準不可の該視準ターゲットを視準可とするシーケンシャルな制御を実行することを特徴とする、請求項4に記載の建設機械の掘削位置特定システム。
【請求項6】
前記制御装置には、前記3軸慣性センサが作動を開始して累積誤差が蓄積され、該累積誤差が誤差閾値となるまでの所要時間が記憶され、
前記建設機械のキャビンには、オペレータ端末が装備されており、
掘削施工中において、前記所要時間が経過する前に、前記制御装置から前記オペレータ端末に対して、前記建設機械を停止させて前記第2制御を実行する指令信号が送信されることを特徴とする、請求項5に記載の建設機械の掘削位置特定システム。
【請求項7】
少なくとも前記オペレータ端末には表示部が設けられており、
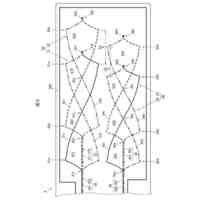
前記表示部には、トンネルの設計掘削断面ラインが表示され、
前記掘削機の先端を掘削断面における実掘削断面ライン上の複数の掘削位置に接触させた際の三次元座標が前記表示部にプロットされることで、前記設計掘削断面ラインよりも過剰に掘削されている余掘り部と、前記設計掘削断面ラインに対して掘削が不十分なアタリ部とが特定されることを特徴とする、請求項6に記載の建設機械の掘削位置特定システム。
【請求項8】
前記建設機械が、3Dスキャナを備え、
前記3Dスキャナにて取得された前記掘削断面までの距離データに基づいて、該掘削断面の複数箇所の3次元座標が特定されて前記実掘削断面ラインが作成され、前記表示部に表示されることを特徴とする、請求項7に記載の建設機械の掘削位置特定システム。
【請求項9】
前記走行台車は、下部走行体と、該下部走行体に対して旋回自在に積層されている、上部旋回体とを有し、
前記上部旋回体に前記取り付け位置が設定され、前記作業装置が旋回自在に取り付けられていることを特徴とする、請求項1又は2に記載の建設機械の掘削位置特定システム。
【請求項10】
先端に掘削機が装着されている作業装置が、走行台車における取り付け位置に旋回自在に取り付けられている、建設機械において、該掘削機の掘削位置を特定する、建設機械の掘削位置特定方法であって、
前記建設機械の停止時において、該建設機械の備える複数の視準ターゲットを1台の測量機にて順に視準して該建設機械と前記作業装置の方向角の初期値を特定する、A工程と、
前記建設機械を作動させて掘削施工を行い、その際に、前記測量機にて1つの前記視準ターゲットを自動追尾し、かつ該建設機械における前記作業装置の取り付け位置に設けられて、前記作業装置のロール角とピッチ角とヨー角を検出する3軸慣性センサにて、該作業装置の方向角を特定し、該3軸慣性センサによる検出データと該測量機による測量データとに基づいて前記掘削位置を特定する、B工程とを有することを特徴とする、建設機械の掘削位置特定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設機械の掘削位置特定システムと掘削位置特定方法に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
山岳トンネルの施工においては、発破後に建設機械を用いて岩盤を掘削する際に、トンネルの設計掘削断面ラインに対して岩盤がトンネルの中央側へ張り出す、所謂アタリ(アタリ部)や、掘り過ぎによる所謂余掘り(余掘り部)などの凹凸が生じ得る。
このような凹凸が生じた際には、設計掘削断面ラインに近づけるべく、アタリ部に対しては油圧ブレーカを用いて除去し、余掘り部に関しては掘削を速やかに止めて凹部の深度を最小限に留める措置が講じられる。
従来のアタリ部の除去方法は、作業員が切羽近傍で目視により確認を行い、レーザーポインター等で除去する箇所を建設機械のオペレータに指示する方法であることから、切羽崩落の際の作業員の巻き込まれの危険性がある。
また、アタリ部や余掘り部の状況確認は作業員と建設機械のオペレータによる経験や技量に頼るところが大きく、アタリ部の除去不足による追加作業の発生や、過大な余掘り部に伴うコンクリート吹付け量の増加に起因して、施工コストが増加するといった課題もある。
【0003】
以上のことから、作業員がレーザーポインター等で建設機械のオペレータに指示する方法に代わり、建設機械のオペレータが自ら、随時変化し得る建設機械の掘削位置を都度精度よく、効率的に特定しながら掘削することにより、施工安全性が高く、施工性が良好であって、アタリ部や余掘り部の発生を抑制することのできる、建設機械の掘削位置特定システムと掘削位置特定方法が望まれる。
【0004】
ここで、特許文献1には、掘削機の基準位置及び方向の設定装置と設定方法が提案されている。
この設定装置は、削岩機を搭載した建設機械と、建設機械をガイドマウンティングで支承するブームと、建設機械とブームの可動部分の作動量を検出するための検出器と、検出器からの検出データに基づいて建設機械の自動位置決め又は位置表示を行う制御装置とを備えた掘削機において、建設機械に設置された1個のプリズムと、建設機械の前後方向移動に伴って移動するプリズムを自動追尾し、検出器の検出データから演算された測定点のプリズム位置の演算データと、自動追尾式測量機による2測定点のプリズム位置の測定データとに基づいて、掘削の基準方向に対する掘削機の基準方向のずれと、切羽に対する掘削機の基準点の位置とを求め、掘削機の基準方向のずれと基準点の位置のデータを制御装置に設定する演算手段とを備えている。
掘削作業を行う際は、掘削機の台車を切羽付近に設置した後、建設機械を移動して、切羽上の点にビットの先端を第1測定点として接触させ、演算手段は第1測定点に対して、検出器の検出データからプリズム位置の演算データを求めるとともに、自動追尾式測量機は、建設機械の移動に伴って移動するプリズムを自動追尾してプリズム位置の第1測定データを測定する。次に、ビットの先端を切羽上の点から所定距離に離隔するように建設機械をその前後方向に第2測定点まで後退させ、自動追尾式測量機は、プリズム位置の第2測定データを測定するというものである。
【先行技術文献】
【特許文献】
【0005】
特開2003-307085号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の掘削機の基準位置及び方向の設定装置によれば、掘削機の基準方向のずれと切羽に対する掘削機の基準点の位置とを容易に求めることができ、基準点の位置と基準方向のずれに関するデータを制御装置に予め設定するための掘削機の準備作業の時間を短縮して、作業効率を向上できるとしている。
しかしながら、このように掘削機の準備作業に関する時間短縮を図ることができたとしても、随時変化し得る建設機械の掘削位置を都度精度よく特定し、施工性を良好にしながら、アタリ部や余掘り部の発生を抑制できるシステムや方法を提案するものではない。
【0007】
本発明は、建設機械のオペレータが自ら、随時変化し得る建設機械の掘削位置を都度精度よく、効率的に特定しながら掘削することにより、施工安全性が高く、施工性が良好であって、アタリ部や余掘り部の発生を抑制することのできる、建設機械の掘削位置特定システムと掘削位置特定方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
前記目的を達成すべく、本発明による建設機械の掘削位置特定システムの一態様は、
先端に掘削機が装着されている作業装置が、走行台車における取り付け位置に旋回自在に取り付けられている、建設機械において、該掘削機の掘削位置を特定する、建設機械の掘削位置特定システムであって、
前記取り付け位置に設けられて、前記作業装置のロール角とピッチ角とヨー角を検出して、該作業装置の方向角を特定する、3軸慣性センサと、
前記建設機械に設置される複数の視準ターゲットと、
前記建設機械の移動に伴って移動する少なくとも1つの前記視準ターゲットを自動追尾して、3次元座標が既知の基準点座標に基づいて該視準ターゲットの3次元座標を測定する、1台の測量機と、
前記3軸慣性センサによる検出データと前記測量機による測量データとに基づいて前記掘削位置を特定する、制御装置とを有することを特徴とする。
【0009】
本態様によれば、走行台車における作業装置の取り付け位置に、作業装置のロール角とピッチ角とヨー角を検出して当該作業装置の方向角を特定する、3軸慣性センサが設置され、建設機械に設置されている複数の視準ターゲット(例えば360度プリズム)のうちの少なくとも1つの視準ターゲットが、3次元座標が既知の1台の測量機にて自動追尾されることにより、3軸慣性センサの検出データと測量機の測量データにて建設機械の掘削位置を特定することが可能になり、建設機械のオペレータが自ら、掘削位置を都度精度よく、効率的に特定しながら掘削を行うことができる。このことにより、レーザーポインター等で建設機械のオペレータに指示する作業員を不要にして施工安全性を高めることができ、アタリ部や余掘り部の発生を抑制することができる。
さらに、例えば建設機械の後方(坑口側)に設置されている測量機は無人にて自動追尾するものであることから、掘削施工は建設機械のオペレータのみでよいこととなり、作業員の削減を図ることも可能になる。ここで、建設機械が無人走行と無人操作を実現できる場合(トンネル坑外にある管理施設からの遠隔操作を含む)は、トンネル内における作業員を完全に不要にした、自動掘削施工を実現できる。
【0010】
例えば、走行台車が掘削を開始する前の停止している状態において、走行台車の備える複数(例えば2つ)の視準ターゲットを後方の1台の測量機が視準して走行台車の3次元座標や方向角を特定し、作業装置の先端にある掘削機の3次元座標を特定する。その後、走行台車が移動したり旋回しながら掘削を行う過程で、測量機は常時1つの視準ターゲットを自動追尾することで建設機械の当該視準ターゲットの3次元座標が特定される。測量機には、自動追尾が可能なトータルステーション(自動追尾トータルステーション)の適用が好ましい。
ここで、「作業装置」とは、例えば、ブームとアームのユニット形態や、ブームのみの形態等を含んでいる。また、走行台車における作業装置の取り付け位置に、作業装置のロール角とピッチ角とヨー角を検出して当該作業装置の方向角を特定する、3軸慣性センサが設置されていることにより、3軸慣性センサは検出データを随時累積することによって、測量された視準ターゲットの3次元座標に関する測量データと合わせて、掘削機の掘削位置を都度特定することが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大成建設株式会社
湧水観測装置と湧水観測方法
3日前
大成建設株式会社
切羽観察システム及び切羽観察方法
7日前
大成建設株式会社
消音設計支援システム、防振設計支援システム
3日前
株式会社ヨコオ
検査治具
4日前
個人
歩行者音声ガイドシステム
3日前
太陽誘電株式会社
検出装置
26日前
昭電工業株式会社
測定装置
5日前
株式会社豊田自動織機
無人走行体
7日前
太陽誘電株式会社
検出装置
25日前
日本碍子株式会社
ガスセンサ
28日前
株式会社プロテリアル
位置検出装置
28日前
株式会社村田製作所
変位センサ
27日前
キーコム株式会社
試験システム
10日前
株式会社ヨコオ
プローブ
27日前
株式会社ニシヤマ
物品取付装置
今日
株式会社ニシヤマ
物品取付装置
今日
トヨタ自動車株式会社
測定治具
7日前
村田機械株式会社
変位検出装置
7日前
キーコム株式会社
試験システム
10日前
株式会社クボタ
検査装置
26日前
株式会社クボタ
検査装置
26日前
三恵技研工業株式会社
レドーム
24日前
TDK株式会社
ガスセンサ
24日前
日本精工株式会社
軸受装置
25日前
株式会社シンカグループ
計測装置
21日前
株式会社ミヤワキ
診断装置
17日前
株式会社ミヤワキ
診断装置
17日前
株式会社ミヤワキ
診断装置
17日前
アズビル株式会社
オイル封入方法
24日前
TDK株式会社
磁気センサ
4日前
TDK株式会社
ガスセンサ
24日前
株式会社不二越
X線測定装置
7日前
株式会社ミツトヨ
光学式エンコーダ
5日前
株式会社ミツトヨ
自動内径測定装置
24日前
トヨタ自動車株式会社
劣化推定装置
今日
三菱マテリアル株式会社
温度センサ
今日
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ