TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024060592
公報種別
公開特許公報(A)
公開日
2024-05-02
出願番号
2023176506
出願日
2023-10-12
発明の名称
適応レーダーフレームフィルタリングのためのシステムおよび方法
出願人
アクシス アーベー
代理人
園田・小林弁理士法人
主分類
G01S
13/53 20060101AFI20240424BHJP(測定;試験)
要約
【課題】レーダーデバイスによってキャプチャされたレーダーフレームから物体の表現を適応的にフィルタ除去するためのシステム及び方法が開示される。
【解決手段】レーダーフレームの前の時間期間中にキャプチャされたレーダーフレームのセットのレンジドップラー表現における物体に対応する検出を含むレンジビン内で、ゼロ速度における最大信号強度が取得される。レーダーフレームのレンジドップラー表現が生成され、レーダーデバイスから物体への方向を表す方向ベクトルが決定される。次いで、取得された動きベクトルと決定された方向ベクトルとに基づいて、物体とレーダーデバイスとの間の半径方向相対速度が決定される。検出が、設定された間隔内に位置することを条件として、レーダーフレームからの物体の表現がフィルタ除去され、検出が、設定された間隔外に位置することを条件として、物体に対応する検出は、レーダーフレームからフィルタ除去されない。
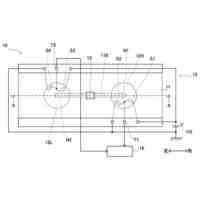
【選択図】図1b
特許請求の範囲
【請求項1】
レーダーデバイスによってキャプチャされたレーダーフレームから物体の表現を適応的にフィルタ除去するための方法であって、前記方法は、
前記レーダーフレームに先行する時間期間中に前記レーダーデバイスによってキャプチャされたレーダーフレームのセットのレンジドップラー表現における前記物体に対応する検出を含むレンジビン内で、ゼロ速度における最大信号強度を取得することであって、前記時間期間が、前記レーダーデバイスによって監視されるシーン内の固定物体に関連する前記レーダーデバイスの振動運動の少なくとも1つの期間を含む、取得することと、
前記レーダーデバイスの前記振動運動に起因する前記レーダーデバイスの動きの決定された大きさおよび方向を表す動きベクトルを取得することと、
前記取得された動きの大きさおよび方向を有する前記レーダーデバイスによってキャプチャされた前記レーダーフレームを受信することと、
前記レーダーフレームのレンジドップラー表現を生成することと、
前記レーダーデバイスから前記物体への方向を表す方向ベクトルを決定することと、
前記取得された動きベクトルと前記決定された方向ベクトルとに基づいて、前記物体と前記レーダーデバイスとの間の半径方向相対速度を決定することと、
前記物体に対応する前記検出を含む前記レンジドップラー表現における前記レンジビンについて、前記決定された半径方向相対速度と前記決定された最大信号強度とに基づいて、前記物体の前記決定された半径方向相対速度の周りの間隔を設定することと、
前記物体に対応する前記検出が、前記設定された間隔内に位置することを条件として、前記レーダーフレームから前記物体の表現をフィルタ除去することと、
前記物体に対応する前記検出が、前記設定された間隔外に位置することを条件として、前記レーダーフレームから前記物体の前記表現をフィルタ除去することを控えることと
を含む、方法。
続きを表示(約 4,200 文字)
【請求項2】
ゼロ速度における最大信号強度を取得するアクションが、
前記レーダーフレームに先行する時間期間中に前記レーダーデバイスによってキャプチャされたレーダーフレームのセットを受信することであって、前記時間期間が、前記レーダーデバイスによって監視されるシーン内の固定物体に関連する前記レーダーデバイスの前記振動運動の少なくとも1つの期間を含む、受信することと、
レーダーフレームの前記セットのレンジドップラー表現を生成することと、
各レンジドップラー表現における前記物体に対応する前記検出を含む前記レンジビン内で、ゼロ速度における信号強度を決定することと、
前記最大信号強度を前記決定された信号強度の最大値として決定することと
を含む、請求項1に記載の方法。
【請求項3】
レーダーデバイスによってキャプチャされた複数のレーダーフレームのうちの第1のレーダーフレームから物体の表現を適応的にフィルタ除去するための方法であって、前記方法は、
前記複数のレーダーフレームの各レーダーフレームについて、
前記第1のレーダーフレームに先行する時間期間中に前記レーダーデバイスによってキャプチャされたレーダーフレームのセットのレンジドップラー表現における前記物体に対応する検出を含むレンジビン内で、ゼロ速度における最大信号強度を取得することであって、前記時間期間が、前記レーダーデバイスによって監視されるシーン内の固定物体に関連する前記レーダーデバイスの振動運動の少なくとも1つの期間を含む、取得することと、
前記レーダーデバイスの前記振動運動に起因する前記レーダーデバイスの動きの決定された大きさおよび方向を表す動きベクトルを取得することと、
動きの前記決定された大きさおよび方向を有する前記レーダーデバイスによってキャプチャされた前記レーダーフレームを受信することと、
前記レーダーフレームのレンジドップラー表現を生成することと、
前記レーダーデバイスから前記検出された物体への方向を表す方向ベクトルを決定することと、
前記決定された動きベクトルと前記決定された方向ベクトルとに基づいて、前記物体と前記レーダーデバイスとの間の半径方向相対速度を決定することと、
前記物体に対応する前記検出を含む前記レンジドップラー表現における前記レンジビンについて、前記決定された半径方向相対速度と前記決定された最大信号強度とに基づいて、前記物体の前記決定された半径方向相対速度の周りの間隔を設定することと、
前記複数のレーダーフレームについての前記設定された間隔の平均として共通間隔を計算することと、
前記物体に対応する前記検出が、前記第1のレーダーフレームの前記レンジドップラー表現の前記レンジビン内の前記計算された共通間隔内に位置することを条件として、前記第1のレーダーフレームから前記物体の表現をフィルタ除去することと、
前記物体に対応する前記検出が、前記第1のレーダーフレームの前記レンジドップラー表現の前記レンジビン内の前記計算された共通間隔外に位置することを条件として、前記第1のレーダーフレームから前記物体の前記表現をフィルタ除去することを控えることと
を含む、方法。
【請求項4】
前記レーダーデバイスの前記振動運動は、前記レーダーデバイスが取り付けられた支持構造の振動運動に起因する、請求項1から3のいずれか一項に記載の方法。
【請求項5】
処理能力を有するデバイスによって実行されたとき、請求項1から4のいずれか一項に記載の方法を実行するための命令を記憶した、非一時的コンピュータ可読記憶媒体。
【請求項6】
レーダーデバイスによってキャプチャされたレーダーフレームから物体の表現を適応的にフィルタ除去するためのデバイスであって、前記デバイスは、
前記レーダーフレームに先行する時間期間中に前記レーダーデバイスによってキャプチャされたレーダーフレームのセットのレンジドップラー表現における前記物体に対応する検出を含むレンジビン内で、ゼロ速度における最大信号強度を取得するように構成された第1の取得機能であって、前記時間期間が、前記レーダーデバイスによって監視されるシーン内の固定物体に関連する前記レーダーデバイスの振動運動の少なくとも1つの期間を含む、第1の取得機能と、
前記レーダーデバイスの前記振動運動に起因する前記レーダーデバイスの動きの決定された大きさおよび方向を表す動きベクトルを取得するように構成された第2の取得機能と、
動きの前記決定された大きさおよび方向を有する前記レーダーデバイスによってキャプチャされた前記レーダーフレームを受信するように構成された受信機能と、
前記レーダーフレームのレンジドップラー表現を生成するように構成された生成機能と、
前記レーダーデバイスから前記物体への方向を表す方向ベクトルを決定するように構成された第1の決定機能と、
前記取得された動きベクトルと前記決定された方向ベクトルとに基づいて、前記物体と前記レーダーデバイスとの間の半径方向相対速度を決定するように構成された第2の決定機能と、
前記物体に対応する前記検出を含む前記レンジドップラー表現における前記レンジビンについて、前記決定された半径方向相対速度と前記決定された最大信号強度とに基づいて、前記物体の前記決定された半径方向相対速度の周りの間隔を設定するように構成された設定機能と、
前記物体に対応する前記検出が、前記設定された間隔内に位置することを条件として、前記レーダーフレームから前記物体の表現をフィルタ除去することと、
前記物体に対応する前記検出が、前記設定された間隔外に位置することを条件として、前記レーダーフレームから前記物体の前記表現をフィルタ除去することを控えることと
を行うように構成されたフィルタリング機能と
を実行するように構成された回路を備える、デバイス。
【請求項7】
前記第1の取得機能が、
前記レーダーフレームに先行する時間期間中に前記レーダーデバイスによってキャプチャされたレーダーフレームのセットを受信することであって、前記時間期間が、前記レーダーデバイスによって監視されるシーン内の固定物体に関連する前記レーダーデバイスの前記振動運動の少なくとも1つの期間を含む、受信することと、
レーダーフレームの前記セットのレンジドップラー表現を生成することと、
各レンジドップラー表現における前記物体に対応する前記検出を含む前記レンジビン内で、ゼロ速度における信号強度を決定することと、
前記最大信号強度を前記決定された信号強度の最大値として決定することと
を行うように構成された、請求項6に記載のデバイス。
【請求項8】
レーダーデバイスによってキャプチャされた複数のレーダーフレームのうちの第1のレーダーフレームから物体の表現を適応的にフィルタ除去するためのデバイスであって、前記デバイスは、
前記複数のレーダーフレームの各レーダーフレームについて、
前記第1のレーダーフレームに先行する時間期間中に前記レーダーデバイスによってキャプチャされたレーダーフレームのセットのレンジドップラー表現における前記物体に対応する検出を含むレンジビン内で、ゼロ速度における最大信号強度を取得するように構成された第1の取得機能であって、前記時間期間が、前記レーダーデバイスによって監視されるシーン内の固定物体に関連する前記レーダーデバイスの振動運動の少なくとも1つの期間を含む、第1の取得機能と、
前記レーダーデバイスの前記振動運動に起因する前記レーダーデバイスの動きの決定された大きさおよび方向を表す動きベクトルを取得するように構成された第2の取得機能と、
動きの前記決定された大きさおよび方向を有する前記レーダーデバイスによってキャプチャされた前記レーダーフレームを受信するように構成された受信機能と、
前記レーダーフレームのレンジドップラー表現を生成するように構成された生成機能と、
前記レーダーデバイスから前記検出された物体への方向を表す方向ベクトルを決定するように構成された第1の決定機能と、
前記決定された動きベクトルと前記決定された方向ベクトルとに基づいて、前記物体と前記レーダーデバイスとの間の半径方向相対速度を決定するように構成された第2の決定機能と、
前記物体を含む前記検出を含む前記レンジドップラー表現における前記レンジビンについて、前記決定された半径方向相対速度と前記決定された最大信号強度とに基づいて、前記物体の前記決定された半径方向相対速度の周りの間隔を設定するように構成された設定機能と
を実行するように構成された回路を備え、
前記回路は、
前記複数のレーダーフレームについての前記設定された間隔の平均として共通間隔を計算するように構成された計算機能と、
前記物体に対応する前記検出が、前記第1のレーダーの前記レンジドップラー表現の前記レンジビン内の前記計算された共通間隔内に位置することを条件として、前記第1のレーダーフレームから前記物体の表現をフィルタ除去することと、
前記物体に対応する前記検出が、前記第1のレーダーの前記レンジドップラー表現の前記レンジビン内の前記計算された共通間隔外に位置することを条件として、前記第1のレーダーフレームから前記物体の前記表現をフィルタ除去することを控えることと
を行うように構成されたフィルタリング機能と
を実行するようにさらに構成された、
デバイス。
【請求項9】
前記レーダーデバイスの前記振動運動は、前記レーダーデバイスが取り付けられた支持構造の振動運動に起因する、請求項6から8のいずれか一項に記載のデバイス。
発明の詳細な説明
【技術分野】
【0001】
本発明は、レーダーフレームの処理に関し、具体的には、レーダーデバイスによってキャプチャされたレーダーフレームから物体の表現をフィルタ除去することに関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
レーダーデバイスが固定支持体に取り付けられ、シーンを監視するために使用されるとき、各レーダーフレームの処理が実行され得、それによって、地面、建物、駐車車両などの静止物体に関係するレーダーデータが各レーダーフレームから除去され得る。そのような処理は、シーン内の移動する物体が静止物体よりも関心が高い適用例において実行され得る。処理は、レーダーデバイスが壁などの固定剛性支持体にしっかりと取り付けられているとき、かなり簡単である。しかしながら、レーダーデバイスが、固定非剛性支持体、例えば振動または前後に揺動することがある非剛性ポールに取り付けられる場合、結果としてレーダーデバイスが移動し、それにより、静止物体と移動するレーダーデバイスとの間の相対運動を引き起こし得る。したがって、そのようなシナリオでは、静止物体に関連するレーダーデータは、レーダーデバイスの移動により静止物体がもはや静止しているように見えないので、レーダーフレームから除去されないことがある。
【0003】
したがって、この文脈における改善が望ましい。
【発明の概要】
【0004】
上記を考慮して、本発明の概念の目的は、当技術分野における上記で特定された欠陥および欠点の1つまたは複数を、単独でまたは組み合わせて軽減するか、緩和するか、またはなくすことである。
【0005】
第1の態様によれば、レーダーデバイスによってキャプチャされたレーダーフレームから物体の表現を適応的にフィルタ除去するための方法が提供される。レーダーフレームに先行する時間期間中にレーダーデバイスによってキャプチャされたレーダーフレームのセットのレンジドップラー表現における物体に対応する検出を含むレンジビン内で、ゼロ速度における最大信号強度が取得され、この時間期間は、レーダーデバイスによって監視されるシーン内の固定物体に関連するレーダーデバイスの振動運動の少なくとも1つの期間を含む。レーダーデバイスの振動運動に起因するレーダーデバイスの動きの決定された大きさおよび方向を表す動きベクトルが取得される。動きの決定された大きさおよび方向を有するレーダーデバイスによってキャプチャされたレーダーフレームが受信され、レーダーフレームのレンジドップラー表現が生成される。レーダーデバイスから物体への方向を表す方向ベクトルが決定され、取得された動きベクトルと決定された方向ベクトルとに基づいて、物体とレーダーデバイスとの間の半径方向相対速度が決定される。物体に対応する検出を含むレンジドップラー表現におけるレンジビンについて、決定された半径方向相対速度と決定された最大信号強度とに基づいて、決定された半径方向相対速度の周りで間隔が設定される。検出が、設定された間隔内に位置することを条件として、レーダーフレームからの物体の表現がフィルタ除去され、検出が、設定された間隔外に位置することを条件として、物体に対応する検出は、レーダーフレームからフィルタ除去されない。
【0006】
レーダーデバイスによってレーダーフレームがキャプチャされたときのレーダーデバイスのための動きベクトルを決定し、レーダーから物体への方向ベクトルを決定することによって、レーダーフレームがキャプチャされたときの物体とレーダーデバイスとの間の半径方向相対速度が決定され得る。次いで、半径方向相対速度は、レーダーフレームのレンジドップラー表現におけるレンジビン内で半径方向相対速度の周りの間隔を決定するために、最大信号強度とともに使用され、このレンジビンは物体に対応する検出を含む。次いで、間隔は、物体の表現がレーダーフレームからフィルタ除去されるかどうかを決定するために使用される。間隔を決定された半径方向相対速度に基づかせることによって、レーダーデバイスの振動運動に起因してレーダーフレームのレンジドップラー表現におけるゼロ速度とは異なる速度を有するように見える静止物体が、静止物体として識別され得、および/または、そのような物体の表現は、レーダーフレームからフィルタ除去され得る。
【0007】
間隔は、レーダーフレームがキャプチャされたときの決定された半径方向相対速度に部分的に基づくので、フィルタリングは、現在の半径方向相対速度に対してより適応的である。間隔の一般的増加が使用される場合、ゆっくり移動する物体がレーダーフレームからフィルタ除去される危険性が高くなる。
【0008】
実施形態では、ゼロ速度における最大信号強度を取得するアクションは、レーダーフレームに先行する時間期間中にレーダーデバイスによってキャプチャされたレーダーフレームのセットを受信することを含み、この時間期間は、レーダーデバイスによって監視されるシーン内の固定物体に関連するレーダーデバイスの振動運動の少なくとも1つの期間を含む。レーダーフレームのセットのレンジドップラー表現が生成され、物体に対応する検出が、レーダーフレームのセットのレンジドップラー表現の各々において識別される。各レンジドップラー表現における物体に対応する検出の、ゼロ速度における信号強度が決定され、最大信号強度は、決定された信号強度の最大値として決定される。
【0009】
第2の態様によれば、レーダーデバイスによってキャプチャされた複数のレーダーフレームのうちの第1のレーダーフレームから物体の表現を適応的にフィルタ除去するための方法が提供される。複数のレーダーフレームの各レーダーフレームについて、物体に対応する検出を含むレンジビン内のゼロ速度における最大信号強度が、第1のレーダーフレームに先行する時間期間中にレーダーデバイスによってキャプチャされたレーダーフレームのセットのレンジドップラー表現において取得され、この時間期間は、レーダーデバイスによって監視されるシーン内の固定物体に関連するレーダーデバイスの振動運動の少なくとも1つの期間を含む。さらに、レーダーデバイスの振動運動に起因するレーダーデバイスの動きの決定された大きさおよび方向を表す動きベクトルが取得される。さらに、動きの決定された大きさおよび方向を有するレーダーデバイスによってキャプチャされたレーダーフレームが受信され、レーダーフレームのレンジドップラー表現が生成される。レーダーデバイスから、検出された物体への方向を表す方向ベクトルが決定され、決定された動きベクトルと決定された方向ベクトルとに基づいて、物体とレーダーデバイスとの間の半径方向相対速度が決定される。物体に対応する検出を含むレンジドップラー表現におけるレンジビンについて、決定された半径方向相対速度と決定された最大信号強度とに基づいて、決定された半径方向相対速度の周りの間隔が設定される。次いで、複数のレーダーフレームについての設定された間隔の平均として共通間隔が計算される。物体に対応する検出が、第1のレーダーフレームのレンジドップラー表現のレンジビン内の計算された共通間隔内に位置することを条件として、物体に対応する検出は、第1のレーダーフレームからフィルタ除去される。物体に対応する検出が、第1のレーダーフレームのレンジドップラー表現のレンジビン内の計算された共通間隔外に位置することを条件として、物体に対応する検出は、第1のレーダーフレームからフィルタ除去されない。
【0010】
第2の態様による方法によって、第1の態様による方法に関連して説明されたように、レーダーデバイスの振動運動に起因してレーダーフレームのレンジドップラー表現におけるゼロ速度とは異なる速度を有するように見える静止物体が、静止物体として識別され得、および/または、そのような物体の表現は、レーダーフレームからフィルタ除去され得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
センサユニット
28日前
太陽誘電株式会社
検出装置
6日前
株式会社チノー
放射温度計
29日前
太陽誘電株式会社
検出装置
7日前
株式会社プロテリアル
位置検出装置
9日前
アズビル株式会社
差圧センサ
12日前
アズビル株式会社
圧力センサ
12日前
日本碍子株式会社
ガスセンサ
9日前
三恵技研工業株式会社
レドーム
5日前
株式会社ヨコオ
プローブ
8日前
株式会社村田製作所
変位センサ
8日前
株式会社クボタ
検査装置
7日前
株式会社クボタ
検査装置
7日前
株式会社テイエルブイ
処理装置
22日前
TDK株式会社
ガスセンサ
20日前
株式会社シンカグループ
計測装置
2日前
大和製衡株式会社
組合せ計量装置
27日前
大和製衡株式会社
組合せ計量装置
27日前
TDK株式会社
ガスセンサ
5日前
TDK株式会社
ガスセンサ
5日前
大和製衡株式会社
組合せ計量装置
27日前
アズビル株式会社
オイル封入方法
5日前
日本精工株式会社
軸受装置
6日前
三菱マテリアル株式会社
温度センサ
2日前
株式会社ミツトヨ
自動内径測定装置
5日前
ニプロ株式会社
粉体検査装置
13日前
住友金属鉱山株式会社
セレン評価方法
27日前
富士電機株式会社
金属検知用アンテナ
5日前
トヨタ自動車株式会社
表示装置
28日前
アンリツ株式会社
テストピース
6日前
太陽誘電株式会社
匂いセンサシステム
20日前
住友金属鉱山株式会社
検査装置
27日前
ニシム電子工業株式会社
液位検出装置
28日前
ヒロセ電機株式会社
運動検出装置
2日前
帝国通信工業株式会社
感圧センサ
15日前
株式会社不二越
動力機構制御装置
8日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ