TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058501
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022165913
出願日
2022-10-14
発明の名称
管理装置、管理方法及び管理プログラム
出願人
エヌ・ティ・ティ・コミュニケーションズ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20240418BHJP(制御;調整)
要約
【課題】災害発生時、または、災害発生が予測される場合における自律走行型ロボットの迅速な退避を支援することができる。
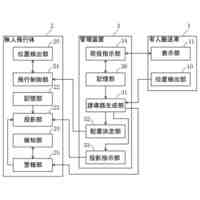
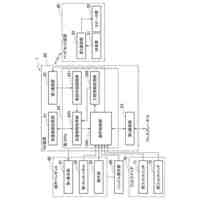
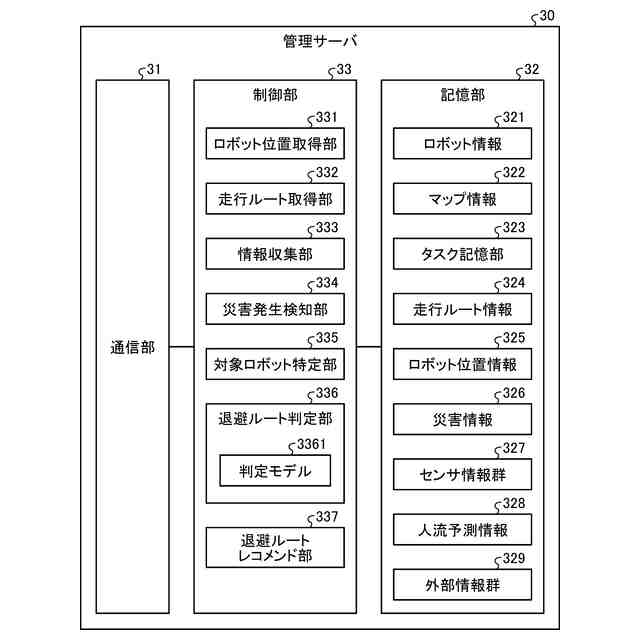
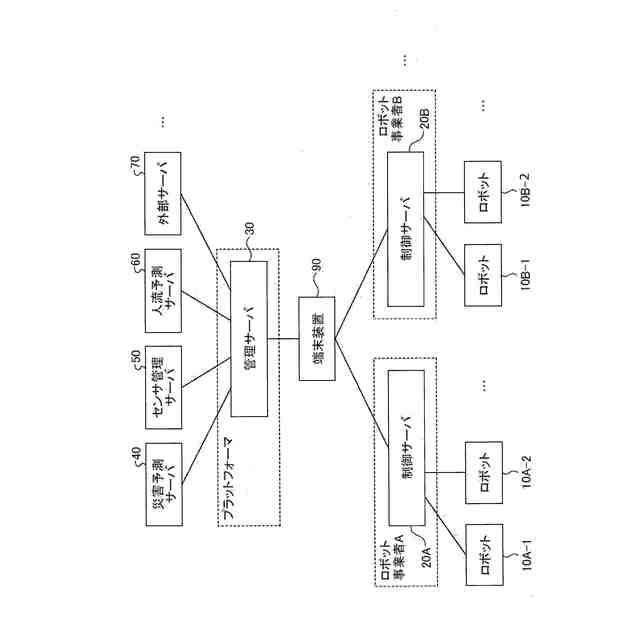
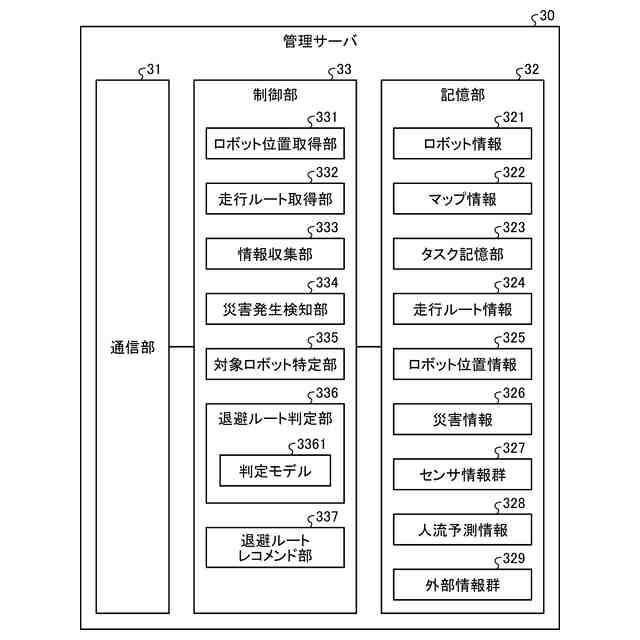
【解決手段】管理サーバ30は、屋外及び屋内を自律走行するロボットを制御する制御サーバから、ロボットの現在位置またはロボットの走行ルートを受信する取得部と、災害情報を含む外部情報を基に、災害の発生と該災害が発生する災害発生エリアを検知する災害発生検知部334と、ロボットの現在位置またはロボットの走行ルートを基に、災害発生エリアに位置する、または、位置すると予測されるロボットを特定する対象ロボット特定部335と、外部情報とマップ情報とを基に、災害発生エリアに位置するロボット、または、位置すると予測されるロボットごとに、予め設定された退避場所までの退避ルートを判定する退避ルート判定部336と、退避ルートを端末装置にレコメンドする退避ルートレコメンド部337とを有する。
【選択図】図4
特許請求の範囲
【請求項1】
屋外及び屋内を自律走行するロボットが走行する各エリアのマップ情報を記憶する記憶部と、
災害情報を含む外部情報を収集する収集部と、
前記ロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信する取得部と、
前記外部情報を基に、災害の発生と該災害が発生する災害発生エリアを検知する検知部と、
前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記災害発生エリアに位置する前記ロボット、または、前記災害発生エリアに位置すると予測される前記ロボットを特定する特定部と、
前記外部情報と前記マップ情報とを基に、前記災害発生エリアに位置するロボット、または、前記災害発生エリアに位置すると予測される前記ロボットごとに、予め設定された退避場所までの退避ルートを判定する判定部と、
前記退避ルートを端末装置にレコメンドするレコメンド部と、
を有することを特徴とする管理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記判定部は、前記災害発生エリアに複数の前記退避場所が設定される場合、複数の前記退避場所に、前記災害発生エリアに位置する各ロボットを分散して退避させる前記退避ルートを判定することを特徴とする請求項1に記載の管理装置。
【請求項3】
前記外部情報は、前記災害発生エリアの人流予測結果を含み、
前記判定部は、前記人流予測結果が示す人流を回避して、前記退避ルートを判定することを特徴とする請求項1に記載の管理装置。
【請求項4】
前記判定部は、前記災害発生エリアに位置するロボット間で異なる前記退避ルートを判定することを特徴とする請求項1に記載の管理装置。
【請求項5】
管理装置が実行する管理方法であって、
災害情報を含む外部情報を収集する工程と、
屋外及び屋内を自律走行するロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信する工程と、
前記外部情報を基に、災害の発生と該災害が発生する災害発生エリアを検知する工程と、
前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記災害発生エリアに位置する前記ロボット、または、前記災害発生エリアに位置すると予測される前記ロボットを特定する工程と、
前記外部情報と、前記ロボットが走行する各エリアのマップ情報とを基に、前記災害発生エリアに位置するロボット、または、前記災害発生エリアに位置すると予測される前記ロボットごとに、予め設定された退避場所までの退避ルートを判定する工程と、
前記退避ルートを端末装置にレコメンドする工程と、
を含んだことを特徴とする管理方法。
【請求項6】
災害情報を含む外部情報を収集するステップと、
屋外及び屋内を自律走行するロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信するステップと、
前記外部情報を基に、災害の発生と該災害が発生する災害発生エリアを検知するステップと、
前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記災害発生エリアに位置する前記ロボット、または、前記災害発生エリアに位置すると予測される前記ロボットを特定するステップと、
前記外部情報と、前記ロボットが走行する各エリアのマップ情報とを基に、前記災害発生エリアに位置するロボット、または、前記災害発生エリアに位置すると予測される前記ロボットごとに、予め設定された退避場所までの退避ルートを判定するステップと、
前記退避ルートを端末装置にレコメンドするステップと、
をコンピュータに実行させるための管理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、管理装置、管理方法及び管理プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、人手不足に対応するため、自律走行型のロボットが開発されている。自律走行型のロボットは、屋内や、屋外を走行することで、物品配送、警備、案内、清掃、人の移乗等のタスクを実施する。
【0003】
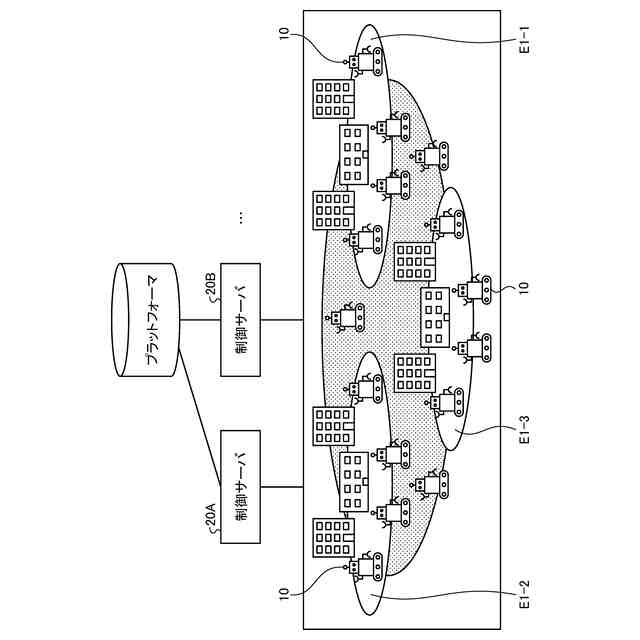
この自律走行型のロボットの走行エリアは、遠隔操作及び複数台同時制御によって、一施設の内部及び該施設周辺のエリアに限らず、複数施設間及びその周辺のエリアや、複数エリア及びそのエリア間の往来まで、拡大が検討されている。
【0004】
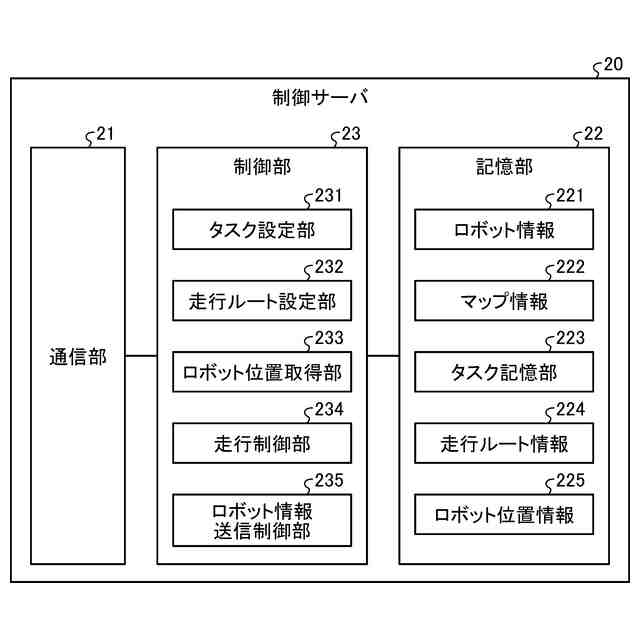
各ロボットは、例えば、それぞれのロボットオペレータによって、タスク及び走行ルートが設定され、ロボット事業者の制御サーバに、走行を制御されることで、自律走行を行う。
【先行技術文献】
【特許文献】
【0005】
特開2019-078618号公報
特開2019-079247号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、災害発生時、または、災害発生が予測される場合において、各ロボットオペレータは、災害発生エリアを走行する各ロボットを退避させる必要がある。この場合、例えば、ロボットオペレータは、災害情報を収集し、災害発生エリアに位置するロボットの走行ルートを退避ルートに書き換えて、ロボットを退避させなくてはならない。
【0007】
ロボット台数及びエリア拡大に伴い、ロボットオペレータが管理するエリアやロボットの台数が増加する中、ロボットオペレータは、災害発生時、または、災害発生が予測される場合には迅速に各ロボットを退避させなくてはならない。このため、災害発生時、または、災害発生が予測される場合におけるロボットオペレータの処理負担が非常に高くなり、ロボットの迅速な退避が難しいことも考えられる。
【0008】
本発明は、上記に鑑みてなされたものであって、災害発生時、または、災害発生が予測される場合における自律走行型ロボットの迅速な退避を支援することができる管理装置、管理方法及び管理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、本発明の管理装置は、屋外及び屋内を自律走行するロボットが走行する各エリアのマップ情報を記憶する記憶部と、災害情報を含む外部情報を収集する収集部と、前記ロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信する取得部と、前記外部情報を基に、災害の発生と該災害が発生する災害発生エリアを検知する検知部と、前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記災害発生エリアに位置する前記ロボット、または、前記災害発生エリアに位置すると予測される前記ロボットを特定する特定部と、前記外部情報と前記マップ情報とを基に、前記災害発生エリアに位置する前記ロボット、または、前記災害発生エリアに位置すると予測される前記ロボットごとに、予め設定された退避場所までの退避ルートを判定する判定部と、前記退避ルートを端末装置にレコメンドするレコメンド部と、を有することを特徴とする。
【発明の効果】
【0010】
本発明によれば、災害発生時、または、災害発生が予測される場合における自律走行型ロボットの迅速な退避を支援することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ミネベアミツミ株式会社
入力装置
19日前
株式会社エクセディ
作業ロボット
7日前
三菱電機株式会社
移動体制御装置
6日前
株式会社クボタ
故障診断装置
26日前
岩田工機株式会社
加工装置
6日前
リックス株式会社
状態検出装置
22日前
村田機械株式会社
搬送車システム
12日前
日置電機株式会社
信号出力装置および抵抗測定装置
今日
日本精工株式会社
制御システムおよび制御方法
今日
日本精工株式会社
制御システムおよび制御方法
今日
日本精工株式会社
制御システムおよび制御方法
今日
日本精工株式会社
制御システムおよび制御方法
今日
多摩川精機株式会社
突入電流防止回路
12日前
株式会社ディスコ
加工装置
12日前
株式会社日立製作所
設備診断装置及び設備診断方法
19日前
清水建設株式会社
自律移動ロボット
19日前
清水建設株式会社
自律移動ロボット
19日前
株式会社IHI
加工装置および加工方法
22日前
三菱ロジスネクスト株式会社
誘導システム
21日前
トヨタ自動車株式会社
生産管理システム
今日
サイレックス・テクノロジー株式会社
通信端末、および、走行状況表示方法
13日前
ニデック株式会社
ロット管理システム、ロット管理方法及び表示装置
26日前
ローム株式会社
スレーブ回路およびそれを用いた遠隔制御システム
6日前
住友重機械工業株式会社
移動体の運転支援装置及び自動運転システム
19日前
株式会社アマダ
工作機械制御装置および工作機械制御方法
19日前
パナソニックIPマネジメント株式会社
シミュレーションシステム
20日前
株式会社日立製作所
プラント制御システム及びプラント制御方法
5日前
ヤンマーホールディングス株式会社
ペダル装置およびこれを備えた作業機械
13日前
株式会社アマダ
加工スケジュール調整システム及びその端末装置
13日前
株式会社スカイディスク
情報処理装置、情報処理方法、及びプログラム
12日前
株式会社フジキン
流量制御装置、気化供給装置および流量制御装置の製造方法
21日前
株式会社日立システムズ
使用リソース設定方法および使用リソース設定装置
今日
ローム株式会社
状態検知装置、半導体集積回路装置、及び車両
26日前
株式会社アマダ
自動運転再開システム及びその端末装置と工作機械
13日前
ラピステクノロジー株式会社
バイアス回路、電圧レギュレータ
26日前
株式会社アマダ
工作機械の運転支援装置および工作機械の運転支援方法
19日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ