TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058204
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022165419
出願日
2022-10-14
発明の名称
モータ制御装置、モータ装置、ワイパー装置、及びモータ制御方法
出願人
株式会社ミツバ
代理人
個人
,
個人
,
個人
主分類
H02P
6/08 20160101AFI20240418BHJP(電力の発電,変換,配電)
要約
【課題】モータ装置を安全に保護しつつ、駆動モードに応じた十分な出力性能を得る。
【解決手段】モータ制御装置は、モータを駆動する第1の駆動モードと、前記第1の駆動モードよりも高出力の第2の駆動モードとを切り替えて、モータ駆動を制御するとともに、デューティ比上限値を超えないように出力デューティ比を制御する駆動制御部と、前記デューティ比上限値として、回転速度が回転閾値以下の低回転領域における低回転デューティ比上限値と、前記駆動出力の最大出力値に対応する最大デューティ比上限値と、前記回転閾値を超える高回転領域における前記低回転デューティ比上限値から前記最大デューティ比上限値への移行期間の上限値とを設定し、前記第1の駆動モードと前記第2の駆動モードとを切り替える際に、前記回転速度の変化に対する前記移行期間の上限値の変化量を示す傾き情報を、前記駆動モードに応じて変更する上限値設定部とを備える。
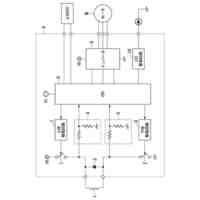
【選択図】図1
特許請求の範囲
【請求項1】
出力軸を有するモータを制御するモータ制御装置であって、
前記モータを駆動する第1の駆動モードと、前記出力軸の回転数及び前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替えて、モータ駆動を制御するとともに、デューティ比上限値を超えないように、前記モータの駆動出力を示す出力デューティ比を制御する駆動制御部と、
前記デューティ比上限値として、回転速度が予め定められた回転閾値以下の低回転領域における出力デューティ比の最大値を制限する低回転デューティ比上限値と、前記駆動出力の最大出力値に対応する最大デューティ比上限値と、前記回転閾値を超える高回転領域における前記低回転デューティ比上限値から前記最大デューティ比上限値への移行期間の上限値とを設定し、前記第1の駆動モードと前記第2の駆動モードとを切り替える際に、前記回転速度の変化に対する前記移行期間の上限値の変化量を示す傾き情報を、前記駆動モードに応じて変更する上限値設定部と
を備えるモータ制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記第1の駆動モードの前記傾き情報は、前記第2の駆動モードの前記傾き情報より大きく設定され、
前記上限値設定部は、前記第1の駆動モードと前記第2の駆動モードとを切り替える際に、前記傾き情報を変更し、変更した前記傾き情報に基づいて、前記移行期間の上限値を変更する
請求項1に記載のモータ制御装置。
【請求項3】
前記最大デューティ比上限値が、100%のデューティ比である
請求項1に記載のモータ制御装置。
【請求項4】
前記第2の駆動モードが、矩形波駆動方式の駆動モードであり、
前記第1の駆動モードが、前記モータを駆動する複数相の駆動信号線のうち、通電していない相の開放期間に対して、PWM(Pulse Width Modulation)制御により中間電力の駆動信号を出力するフリーレス駆動方式の駆動モードである
請求項1に記載のモータ制御装置。
【請求項5】
前記中間電力の駆動信号は、最大デューティ比のPWM信号と最小デューティ比のPWM信号との中間のデューティ比のPWM信号、又は外部から入力された指示デューティ比の1/2のデューティ比のPWM信号である
請求項4に記載のモータ制御装置。
【請求項6】
前記モータは、3相の巻線を有するブラシレスモータであり、
前記駆動制御部は、3相の駆動信号を生成するインバータが有する複数のスイッチング素子の導通を、前記第1の駆動モードと、前記第2の駆動モードとで切り替えて制御する
請求項1に記載のモータ制御装置。
【請求項7】
前記モータと、
請求項1から請求項6のいずれか一項に記載のモータ制御装置と
を備えるモータ装置。
【請求項8】
前記モータと、
請求項1から請求項6のいずれか一項に記載のモータ制御装置と
を備え、
前記モータ制御装置が、前記モータを用いて、ワイパー部材にウィンド面での払拭動作を行わせる
ワイパー装置。
【請求項9】
出力軸を有するモータを制御するモータ制御方法であって、
駆動制御部が、前記モータを駆動する第1の駆動モードと、前記出力軸の回転数及び前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替えて、モータ駆動を制御するとともに、デューティ比上限値を超えないように、前記モータの駆動出力を示す出力デューティ比を制御する駆動制御ステップと、
上限値設定部が、前記デューティ比上限値として、回転速度が予め定められた回転閾値以下の低回転領域における出力デューティ比の最大値を制限する低回転デューティ比上限値と、前記駆動出力の最大出力値に対応する最大デューティ比上限値と、前記回転閾値を超える高回転領域における前記低回転デューティ比上限値から前記最大デューティ比上限値への移行期間の上限値とを設定し、前記第1の駆動モードと前記第2の駆動モードとを切り替える際に、前記回転速度の変化に対する前記移行期間の上限値の変化量を示す傾き情報を、前記駆動モードに応じて変更する上限値設定ステップと
を含むモータ制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置、モータ装置、ワイパー装置、及びモータ制御方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近年、モータ制御において、負荷の大きさに応じて、例えば、フリーレス駆動モードと、矩形波駆動モードのように、異なる駆動モードに切り替えるモータ制御装置が知られている(例えば、特許文献1を参照)。ここで、フリーレス駆動モードとは、3相のうちOFF相(相開放期間に対応する。以下、フリー相と呼ぶことがある)にDuty(デューティ)の1/2を出力する駆動モードであり、同一の電力で駆動した場合に、矩形波駆動モードよりも回転数が低下する低出力の駆動モードである。
【先行技術文献】
【特許文献】
【0003】
特開2020-48401号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述のようなモータ制御装置では、例えば、モータの動作中に、負荷がかかり、モータの回転数(回転速度)が低下した場合に、過電流を防止するために、モータの回転数に応じて、モータの出力デューティを制限する保護機能を有している。
しかしながら、従来技術のモータ制御装置では、モータの駆動特性の異なる2つの駆動モードのうちの一方の特性に合わせて、共通の出力デューティ比の上限値(デューティリミット値)を設定して、モータの保護を行っている。そのため、従来技術のモータ制御装置では、駆動モードによっては、過剰に制限がかかって十分な出力性能を得られない問題があった。
【0005】
本発明は、上記問題を解決すべくなされたもので、その目的は、モータ装置を安全に保護しつつ、駆動モードに応じた十分な出力性能を得ることができるモータ制御装置、モータ装置、ワイパー装置、及びモータ制御方法を提供することにある。
【課題を解決するための手段】
【0006】
上記問題を解決するために、本発明の一態様は、出力軸を有するモータを制御するモータ制御装置であって、前記モータを駆動する第1の駆動モードと、前記出力軸の回転数及び前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替えて、モータ駆動を制御するとともに、デューティ比上限値を超えないように、前記モータの駆動出力を示す出力デューティ比を制御する駆動制御部と、前記デューティ比上限値として、回転速度が予め定められた回転閾値以下の低回転領域における出力デューティ比の最大値を制限する低回転デューティ比上限値と、前記駆動出力の最大出力値に対応する最大デューティ比上限値と、前記回転閾値を超える高回転領域における前記低回転デューティ比上限値から前記最大デューティ比上限値への移行期間の上限値とを設定し、前記第1の駆動モードと前記第2の駆動モードとを切り替える際に、前記回転速度の変化に対する前記移行期間の上限値の変化量を示す傾き情報を、前記駆動モードに応じて変更する上限値設定部とを備えるモータ制御装置である。
【0007】
また、本発明の一態様は、出力軸を有するモータを制御するモータ制御方法であって、駆動制御部が、前記モータを駆動する第1の駆動モードと、前記出力軸の回転数及び前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替えて、モータ駆動を制御するとともに、デューティ比上限値を超えないように、前記モータの駆動出力を示す出力デューティ比を制御する駆動制御ステップと、上限値設定部が、前記デューティ比上限値として、回転速度が予め定められた回転閾値以下の低回転領域における出力デューティ比の最大値を制限する低回転デューティ比上限値と、前記駆動出力の最大出力値に対応する最大デューティ比上限値と、前記回転閾値を超える高回転領域における前記低回転デューティ比上限値から前記最大デューティ比上限値への移行期間の上限値とを設定し、前記第1の駆動モードと前記第2の駆動モードとを切り替える際に、前記回転速度の変化に対する前記移行期間の上限値の変化量を示す傾き情報を、前記駆動モードに応じて変更する上限値設定ステップとを含むモータ制御方法である。
【発明の効果】
【0008】
本発明によれば、モータ装置を安全に保護しつつ、駆動モードに応じた十分な出力性能を得ることができる。
【図面の簡単な説明】
【0009】
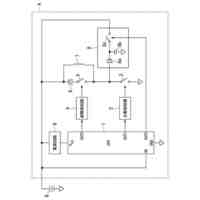
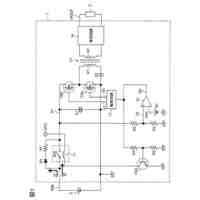
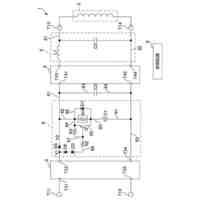
本実施形態によるモータ装置の一例を示すブロック図である。
本実施形態における矩形波駆動パターンの一例を示す図である。
本実施形態における矩形波駆動パターンの一例をテーブルにまとめた図である。
本実施形態におけるフリーレス駆動パターンの第1の例を示す図である。
本実施形態におけるフリーレス駆動パターンの第1の例をテーブルにまとめた図である。
本実施形態におけるフリーレス駆動パターンの第2の例を示す図である。
本実施形態におけるフリーレス駆動パターンの第2の例をテーブルにまとめた図である。
本実施形態における矩形波駆動とフリーレス駆動との特性の違いを示す図である。
本実施形態におけるモータ制御装置のデューティリミット値の一例を示す図である。
本実施形態によるモータ制御装置のデューティリミット値の設定処理の一例を示すフローチャートである。
本実施形態によるモータ制御装置の移行期間における駆動モードに応じたデューティリミット値の設定処理の一例を示すフローチャートである。
本実施形態によるモータ制御装置の出力制限処理の一例を示すフローチャートである。
本実施形態によるモータ制御装置の移行期間における駆動モードに応じたデューティリミット値の設定処理の第1の変形例を示すフローチャートである。
本実施形態によるモータ制御装置の移行期間における駆動モードに応じたデューティリミット値の設定処理の第2の変形例を示すフローチャートである。
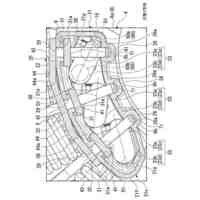
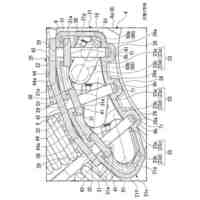
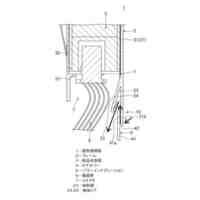
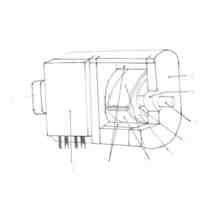
本実施形態によるワイパー装置の一例を示す構成図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態によるモータ制御装置、モータ装置、ワイパー装置、及びモータ制御方法について、図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
2軸モーター
19日前
個人
配線器具用取付枠
2日前
ニデック株式会社
モータ
1か月前
ニデック株式会社
モータ
8日前
個人
バッテリーの補助装置
27日前
株式会社ダイヘン
電源装置
8日前
株式会社アイシン
ロータ
1日前
ニチコン株式会社
電源装置
今日
個人
すだれ型の薄膜太陽光発電装置
今日
個人
磁力のみを動力とするモーター
28日前
ニデック株式会社
モータ
今日
株式会社アイシン
ステータ
1日前
中国電力株式会社
給電装置
今日
日産自動車株式会社
ロータ
8日前
トヨタ自動車株式会社
モータ
13日前
日産自動車株式会社
発電装置
27日前
株式会社ミツバ
回転電機
14日前
富士電機株式会社
電力変換装置
15日前
個人
非対称鏡像力駆動型の静電発電機
15日前
株式会社ミツバ
制動装置
20日前
株式会社ミツバ
回転電機
1日前
株式会社ミツバ
駆動装置
8日前
株式会社ミツバ
回転電機
27日前
株式会社ミツバ
回転電機
27日前
オムロン株式会社
電力変換装置
20日前
トヨタ自動車株式会社
自動充電ロボット
2日前
コーセル株式会社
スイッチング電源装置
1日前
株式会社豊田自動織機
電動圧縮機
今日
ニデック株式会社
コイル挿入装置
今日
ヴィガラクス株式会社
電気供給システム
21日前
株式会社ダイヘン
双方向コンバータ
14日前
矢崎総業株式会社
電気接続箱
21日前
トヨタ自動車株式会社
積層コアの製造方法
今日
学校法人金沢工業大学
レクテナ装置
8日前
ニチコン株式会社
電源装置
27日前
個人
超電導ロータリー式発電原動機
20日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ