TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057328
公報種別
公開特許公報(A)
公開日
2024-04-24
出願番号
2022163988
出願日
2022-10-12
発明の名称
作業機械の異常判定装置及びこれを備えた作業機械
出願人
国立大学法人広島大学
,
公立大学法人大阪
,
コベルコ建機株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20240417BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械における異常を判定する場合において誤判定がなされることを抑制する。
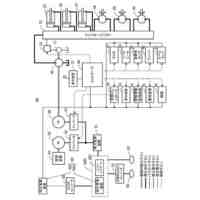
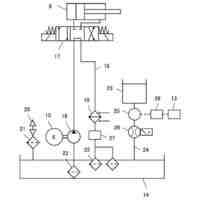
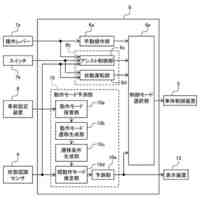
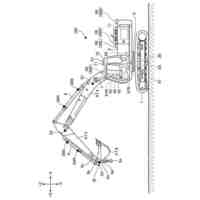
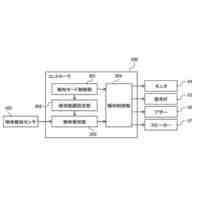
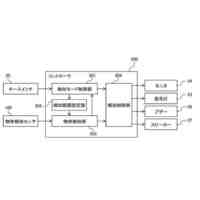
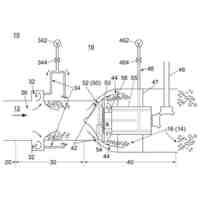
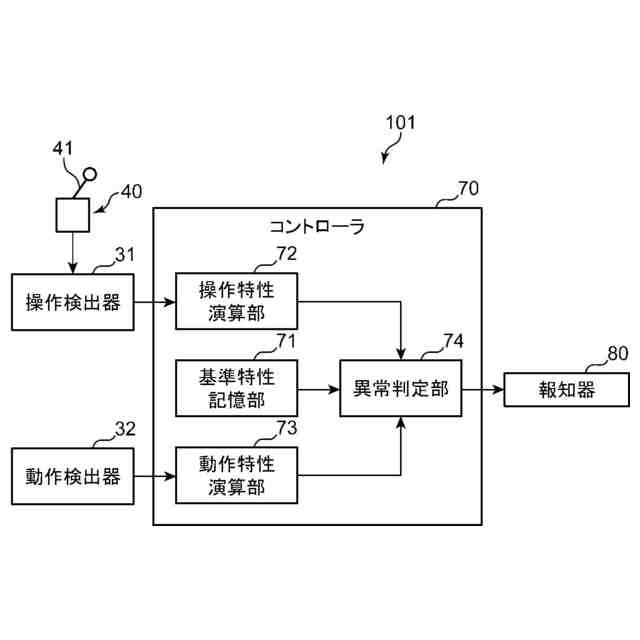
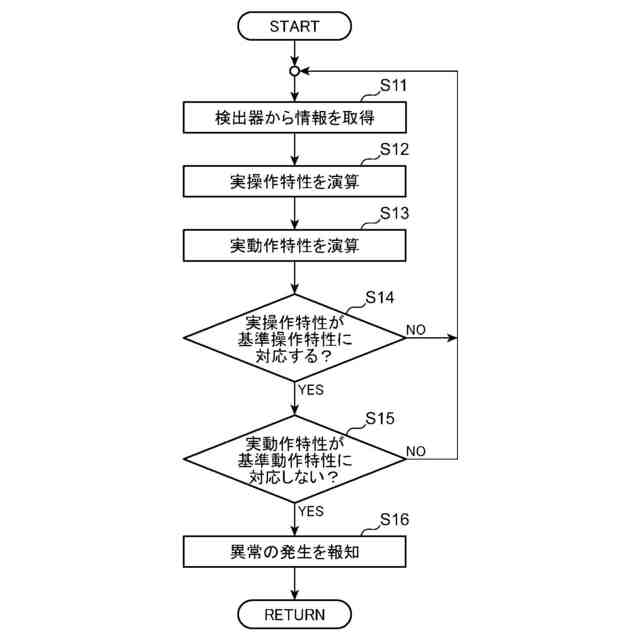
【解決手段】異常判定装置101は、操作器40に与えられる操作の操作量を検出する操作検出器31と、作業機械100の動作を検出する動作検出器32と、操作の操作量の特性の基準としての基準操作特性を予め記憶するコントローラ70と、を備える。コントローラ70は、操作検出器31による操作の操作量の検出結果を用いて操作の操作量の実際の特性である実操作特性を取得し、実操作特性が基準操作特性に対応する場合には、動作検出器32による作業機械100の動作の検出結果を用いて作業機械100の異常を判定し、実操作特性が基準操作特性に対応しない場合には異常の判定を保留する。
【選択図】図2
特許請求の範囲
【請求項1】
作業機械を動かすためにオペレータによって操作器に与えられる操作の操作量を検出する操作検出器と、
前記作業機械の動作を検出する動作検出器と、
前記操作の操作量の特性の基準としての基準操作特性を予め記憶するコントローラと、を備え、
前記コントローラは、前記操作検出器による前記操作の操作量の検出結果を用いて前記操作の操作量の実際の特性である実操作特性を取得し、前記実操作特性が前記基準操作特性に対応する場合には、前記動作検出器による前記作業機械の動作の検出結果を用いて前記作業機械の異常を判定し、前記実操作特性が前記基準操作特性に対応しない場合には前記異常の判定を保留する、異常判定装置。
続きを表示(約 1,300 文字)
【請求項2】
前記コントローラは、
前記基準操作特性に対応する前記作業機械の動作の特性の基準としての基準動作特性を前記基準操作特性と関連付けて予め記憶し、
前記動作検出器による前記作業機械の動作の検出結果を用いて前記作業機械の動作の実際の特性である実動作特性を取得し、
前記実操作特性が前記基準操作特性に対応する場合には、前記実動作特性と前記基準動作特性とを比較することにより前記異常の判定を行う、請求項1に記載の異常判定装置。
【請求項3】
前記基準操作特性は、前記作業機械が行う作業であって予め定められた第1作業に関連づけられて前記コントローラに記憶された第1基準操作特性であり、
前記コントローラは、前記作業機械が行う作業であって前記第1作業とは異なる第2作業に関連付けられた第2基準操作特性をさらに記憶し、前記作業機械が行う作業が前記第1作業である場合には前記第1基準操作特性を用いて前記異常の判定を行い、前記作業機械が行う作業が前記第2作業である場合には前記第2基準操作特性を用いて前記異常の判定を行う、請求項1に記載の異常判定装置。
【請求項4】
前記コントローラは、前記動作検出器による前記作業機械の動作の検出結果を用いて前記作業機械が行う作業が前記第1作業及び前記第2作業の何れであるかを判定する、請求項3に記載の異常判定装置。
【請求項5】
前記基準動作特性は、前記作業機械が行う作業であって予め定められた第1作業に関連づけられて前記コントローラに記憶された第1基準動作特性であり、
前記コントローラは、前記作業機械が行う作業であって前記第1作業とは異なる第2作業に関連付けられた第2基準動作特性をさらに記憶し、前記作業機械が行う作業が前記第1作業である場合には前記第1基準動作特性を用いて前記異常の判定を行い、前記作業機械が行う作業が前記第2作業である場合には前記第2基準動作特性を用いて前記異常の判定を行う、請求項2に記載の異常判定装置。
【請求項6】
前記コントローラは、前記操作検出器により検出される前記操作の操作量と、前記基準操作特性を作成するために予め設定されたモデルと、を用いて前記基準操作特性を作成して記憶する、請求項1に記載の異常判定装置。
【請求項7】
前記コントローラは、前記動作検出器により検出される前記作業機械の動作と、前記基準動作特性を作成するために予め設定されたモデルと、を用いて前記基準動作特性を作成して記憶する、請求項2に記載の異常判定装置。
【請求項8】
前記コントローラは、前記基準操作特性を記憶する基準特性記憶部を備え、
前記基準特性記憶部は、前記作業機械から離れた位置に配置された管理装置に設けられ、
前記コントローラは、通信器をさらに備え、前記通信器は、前記基準特性記憶部と無線又は有線による通信によりデータの送受信を行うように構成されている、請求項1に記載の異常判定装置。
【請求項9】
請求項1~8の何れか1項に記載の異常判定装置を備える作業機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械における異常を判定する技術に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1は、作業車両において油圧ポンプの異常を検知することを目的とする技術を開示している。この特許文献1の作業車両は、動作状態判定部と、異常判定部と、を備える。動作状態判定部は、複数の動作部の組み合わせによる動作状態を判定する。異常判定部は、動作状態判定部によって判定された動作状態に対応し、且つ予め設定された複数の油圧ポンプ間の吐出圧の関係である第1関係と、検出部によって検出された複数の油圧ポンプの間の吐出圧の関係である第2関係と、を比較し、第2関係が第1関係と異なる場合に、複数の油圧ポンプのうち少なくとも1つの油圧ポンプに異常が発生していると判定する。
【先行技術文献】
【特許文献】
【0003】
特開2019-112801号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術では、複数の操作レバーに与えられる操作に基づいて前記動作状態が判定され、この動作状態に対応する前記関係を用いて異常の判定が行われる。しかし、操作レバーに与えられる操作の具体的な特性は、オペレータによって異なることがあるため、複数の操作レバーに与えられる操作と、予め想定された動作状態と、が必ずしも対応しない場合もある。この場合、作業機械の構成要素に異常がないにもかかわらず、異常があると判定される場合、すなわち誤判定がなされる場合がある。
【0005】
本開示は、作業機械における異常を判定する場合において誤判定がなされることを抑制できる異常判定装置及びこれを備えた作業機械を提供することを目的とする。
【課題を解決するための手段】
【0006】
提供される異常判定装置は、作業機械を動かすためにオペレータによって操作器に与えられる操作の操作量を検出する操作検出器と、前記作業機械の動作を検出する動作検出器と、前記操作の操作量の特性の基準としての基準操作特性を予め記憶するコントローラと、を備え、前記コントローラは、前記操作検出器による前記操作の操作量の検出結果を用いて前記操作の操作量の実際の特性である実操作特性を取得し、前記実操作特性が前記基準操作特性に対応する場合には、前記動作検出器による前記作業機械の動作の検出結果を用いて前記作業機械の異常を判定し、前記実操作特性が前記基準操作特性に対応しない場合には前記異常の判定を保留する。
【0007】
この異常判定装置では、基準操作特性が操作の操作量の特性の基準として予めコントローラに記憶されており、コントローラは、実操作特性が基準操作特性に対応する場合には作業機械の異常を判定する一方で、実操作特性が基準操作特性に対応しない場合、言い換えると、想定外の操作特性を有する操作が行われた場合には、異常の判定を保留するので、誤判定がなされることを抑制できる。
【0008】
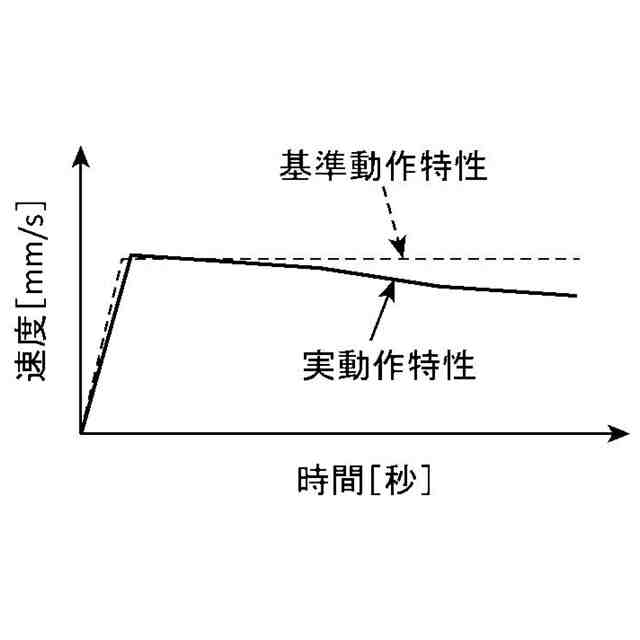
前記コントローラは、前記基準操作特性に対応する前記作業機械の動作の特性の基準としての基準動作特性を前記基準操作特性と関連付けて予め記憶し、前記動作検出器による前記作業機械の動作の検出結果を用いて前記作業機械の動作の実際の特性である実動作特性を取得し、前記実操作特性が前記基準操作特性に対応する場合には、前記実動作特性と前記基準動作特性とを比較することにより前記異常の判定を行うことが好ましい。この構成では、実動作特性と比較される基準動作特性は、基準操作特性と関連付けて予め記憶されたものであり、基準操作特性を有する操作が行われた場合に想定される動作特性である。従って、この構成では、異常の判定が予め想定された範囲で適切に行われる。
【0009】
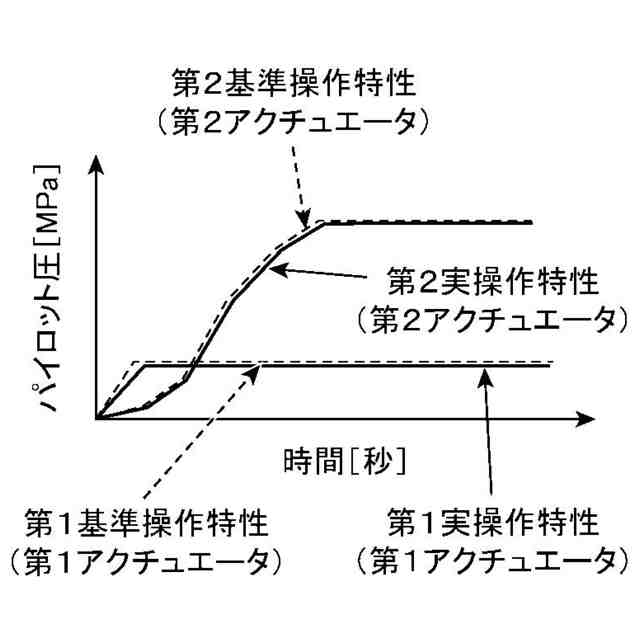
前記基準操作特性は、前記作業機械が行う作業であって予め定められた第1作業に関連づけられて前記コントローラに記憶された第1基準操作特性であり、前記コントローラは、前記作業機械が行う作業であって前記第1作業とは異なる第2作業に関連付けられた第2基準操作特性をさらに記憶し、前記作業機械が行う作業が前記第1作業である場合には前記第1基準操作特性を用いて前記異常の判定を行い、前記作業機械が行う作業が前記第2作業である場合には前記第2基準操作特性を用いて前記異常の判定を行ってもよい。この構成では、第1作業において想定される第1基準操作特性が第1作業に関連付けられて記憶され、第2作業において想定される第2基準操作特性が第2作業に関連付けられて記憶されている。そして、コントローラは、第1基準操作特性及び第2基準操作特性のうち実際の作業の内容に応じた基準操作特性を用いて、作業ごとに適切な異常の判定を行うことができる。
【0010】
前記コントローラは、前記動作検出器による前記作業機械の動作の検出結果を用いて前記作業機械が行う作業が前記第1作業及び前記第2作業の何れであるかを判定することが好ましい。この構成では、コントローラが動作検出器による検出結果を用いて自動的に作業を判別するので、例えばオペレータがコントローラに対して作業の内容を特定するための入力を行うことが不要になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
杭頭接合部用部材
18日前
株式会社SKT
掘削ロッド
20日前
前澤工業株式会社
除塵機
19日前
住友建機株式会社
電動ショベル
10日前
住友建機株式会社
ショベル
17日前
日鉄建材株式会社
斜面安定化構造
11日前
株式会社エスイー
対土石流構造物
17日前
個人
洪水防止堤防 又は 津波防止堤防
17日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
住友重機械工業株式会社
ショベル
10日前
個人
丸太等の柱断面にU字型工作物を付設する柱
4日前
日立建機株式会社
建設機械用部品
17日前
日本車輌製造株式会社
杭打機の制御装置
20日前
日本車輌製造株式会社
杭打機の制御装置
20日前
株式会社日立建機ティエラ
建設機械
24日前
株式会社日立建機ティエラ
建設機械
24日前
住友建機株式会社
電動ショベル及びプログラム
10日前
株式会社日立建機ティエラ
建設機械
24日前
株式会社ケー・エフ・シー
注入薬液移送システム
10日前
日立建機株式会社
建設機械
24日前
株式会社タイセン工業
支柱支持構造及び支持部材
17日前
株式会社小松製作所
作業機械
18日前
調和工業株式会社
振動補助装置及び施工方法
5日前
八千代エンジニヤリング株式会社
気泡発生システム
12日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
建設機械
11日前
岡部株式会社
アンカー用受圧板
11日前
日立建機株式会社
作業機械
24日前
五洋建設株式会社
洗掘防止構造及びその構築方法
10日前
日立建機株式会社
ホイールローダ
24日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ