TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057293
公報種別
公開特許公報(A)
公開日
2024-04-24
出願番号
2022163932
出願日
2022-10-12
発明の名称
作業車両制御装置および作業車両制御方法
出願人
国立研究開発法人農業・食品産業技術総合研究機構
代理人
個人
主分類
A01B
69/00 20060101AFI20240417BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】十分な安全性を担保しつつ、作業者の作業車両への接近により作業機が頻繁に停止することを防いで作業能率を向上させることができるようにする。
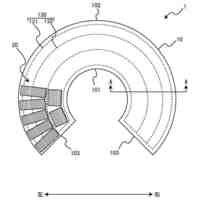
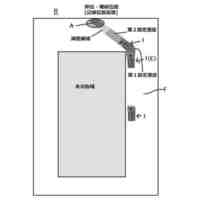
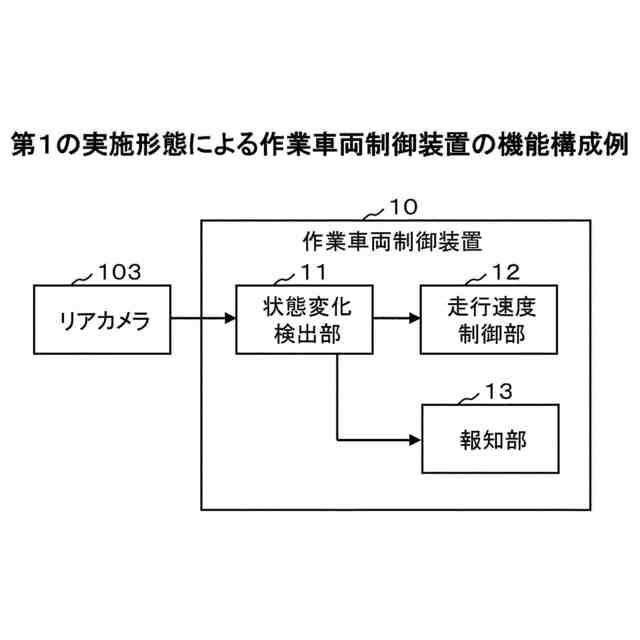
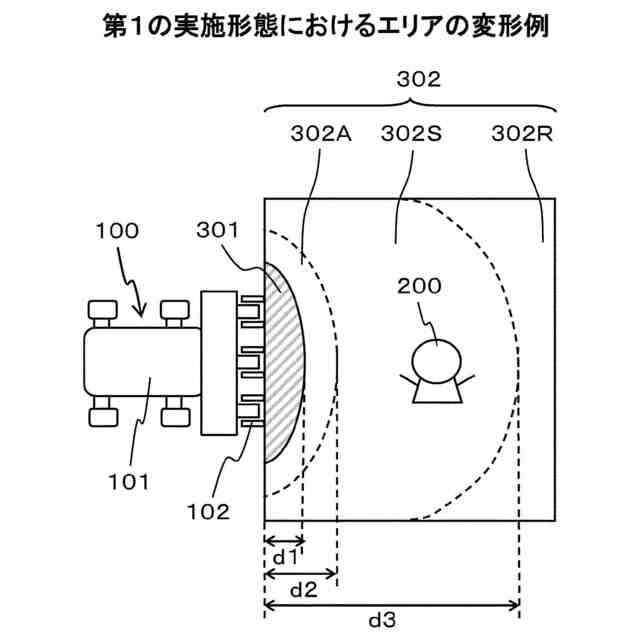
【解決手段】作業車両100の後方で作業をする作業者200の作業車両100からの距離または相対位置の状態変化を検出する状態変化検出部11と、検出される状態変化に応じて作業車両100の走行速度を制御する走行速度制御部12とを備え、作業者200が接触危険エリア301(作業機を停止させるエリア)に近づいたときに、走行速度を上げて作業車両100が作業者200から離れるようにすることにより、接触危険エリア301を広くしなくても、作業者200と作業車両100との接触事故を防ぐことができるようにするとともに、作業者200が接触危険エリア301に入ることによる作業機の頻繁な停止を防ぐことができるようにする。
【選択図】図3
特許請求の範囲
【請求項1】
後部に作業機を備えた作業車両を目標経路に沿って自動的に走行させる際の走行制御を行う作業車両制御装置であって、
上記作業車両の後方で作業をする作業者の上記作業車両からの距離または相対位置の状態変化を検出する状態変化検出部と、
上記状態変化検出部により検出される状態変化に応じて、上記作業車両の走行速度を制御する走行速度制御部とを備えた
ことを特徴とする作業車両制御装置。
続きを表示(約 2,900 文字)
【請求項2】
上記作業車両に近い方から順に接触危険エリアおよび作業エリアを設定し、
上記作業エリアのうち、上記接触危険エリアに隣接するエリアを接近エリアとし、
上記走行速度制御部は、上記作業者が上記作業エリア内で上記接近エリア外にいる状態から上記接近エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行速度を上げる
ことを特徴とする請求項1に記載の作業車両制御装置。
【請求項3】
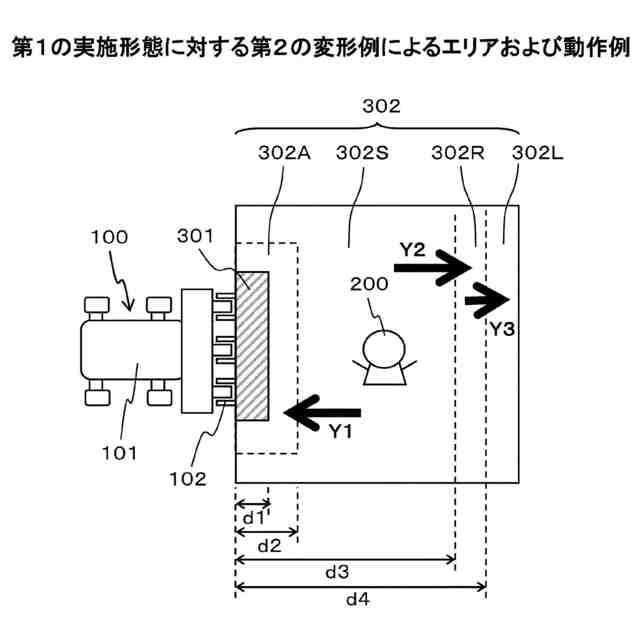
上記作業エリアのうち、上記接近エリアから通常エリアを挟んで離間した遠方側のエリアを後退エリアとし、
上記走行速度制御部は、上記作業者が上記作業エリア内で上記後退エリア外にいる状態から上記後退エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行速度を下げる
ことを特徴とする請求項2に記載の作業車両制御装置。
【請求項4】
上記作業エリアのうち、上記接近エリアから通常エリアを挟んで離間した遠方側のエリアを後退エリア、当該後退エリアよりも遠方側のエリアを作業遅れエリアとし、
上記走行速度制御部は、上記作業者が上記作業エリア内で上記後退エリアよりも前方にいる状態から上記後退エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行速度を下げるとともに、上記作業者が上記作業エリア内で上記作業遅れエリア外にいる状態から上記作業遅れエリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行を停止する
ことを特徴とする請求項2に記載の作業車両制御装置。
【請求項5】
上記作業車両に近い方から順に接触危険エリア、熟練者作業エリアおよび初心者作業エリアを設定し、
上記熟練者作業エリアのうち、上記接触危険エリアに隣接するエリアを熟練者接近エリアとし、上記初心者作業エリアのうち、上記熟練者作業エリアに隣接するエリアを初心者接近エリアとし、
上記走行速度制御部は、上記作業者が上記熟練者作業エリア内で上記熟練者接近エリア外にいる状態から上記熟練者接近エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたとき、または、上記作業者が上記初心者作業エリア内で上記初心者接近エリア外にいる状態から上記初心者接近エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行速度を上げる
ことを特徴とする請求項1に記載の作業車両制御装置。
【請求項6】
上記熟練者作業エリアのうち、上記熟練者接近エリアから熟練者通常エリアを挟んで離間した遠方側のエリアを熟練者後退エリアとするとともに、上記初心者作業エリアのうち、上記初心者接近エリアから初心者通常エリアを挟んで離間した遠方側のエリアを初心者後退エリアとし、
上記走行速度制御部は、上記作業者が上記熟練者作業エリア内で上記熟練者後退エリア外にいる状態から上記熟練者後退エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたとき、または、上記作業者が上記初心者作業エリア内で上記初心者後退エリア外にいる状態から上記初心者後退エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行速度を下げる
ことを特徴とする請求項5に記載の作業車両制御装置。
【請求項7】
上記熟練者作業エリアのうち、上記熟練者接近エリアから熟練者通常エリアを挟んで離間した遠方側のエリアを熟練者後退エリアとし、上記初心者作業エリアのうち、上記初心者接近エリアから初心者通常エリアを挟んで離間した遠方側のエリアを初心者後退エリア、当該初心者後退エリアよりも遠方側のエリアを作業遅れエリアとし、
上記走行速度制御部は、上記作業者が上記熟練者作業エリア内で上記熟練者後退エリア外にいる状態から上記熟練者後退エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたとき、または、上記初心者作業エリア内で上記初心者後退エリアよりも前方にいる状態から上記初心者後退エリア内にいる状態へと変位したときに、上記作業車両の走行速度を下げるとともに、上記作業者が上記作業遅れエリア外にいる状態から上記作業遅れエリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行を停止する
ことを特徴とする請求項5に記載の作業車両制御装置。
【請求項8】
上記走行速度制御部は、上記作業者が上記熟練者接近エリア内または上記熟練者後退エリア内にいる状態へと変化したことに応じて上記作業車両の走行速度を変えた後、上記作業者が上記熟練者接近エリア外または上記熟練者後退エリア外にいる状態へと戻る状態変化が上記状態変化検出部により検出されたとしても、変化後の走行速度を維持するとともに、上記作業者が上記初心者接近エリア内または上記初心者後退エリア内にいる状態へと変化したことに応じて上記作業車両の走行速度を変えた後、上記作業者が上記初心者接近エリア外または上記初心者後退エリア外にいる状態へと戻る状態変化が上記状態変化検出部により検出されたとしても、変化後の走行速度を維持する請求項4に記載の作業車両制御装置。
【請求項9】
上記作業者が熟練者であるか初心者であるかの属性を認識する属性認識部を更に備え、
上記走行速度制御部は、上記属性認識部により認識された属性が上記熟練者であるか上記初心者であるかに応じて、上記作業車両の走行速度の制御内容を変える
ことを特徴とする請求項1に記載の作業車両制御装置。
【請求項10】
上記接触危険エリアおよび上記作業エリアとしてそれぞれ熟練者用および初心者用を設定し、熟練者用接触危険エリアよりも初心者用接触危険エリアを大きく設定し、
上記熟練者用の熟練者作業エリアのうち、上記熟練者用接触危険エリアに隣接するエリアを熟練者接近エリアとするとともに、上記初心者用の初心者作業エリアのうち、上記初心者用接触危険エリアに隣接するエリアを初心者接近エリアとし、
上記走行速度制御部は、上記属性認識部により上記熟練者であると認識された作業者が上記熟練者作業エリア内で上記熟練者接近エリア外にいる状態から上記熟練者接近エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたとき、または、上記属性認識部により上記初心者であると認識された作業者が上記初心者作業エリア内で上記初心者接近エリア外にいる状態から上記初心者接近エリア内にいる状態へと変化する状態変化が上記状態変化検出部により検出されたときに、上記作業車両の走行速度を上げる
ことを特徴とする請求項2および請求項9に記載の作業車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両制御装置および作業車両制御方法に関し、特に、後部に作業機を備えた作業車両を目標経路に沿って自動的に走行させる際の走行制御および作業機の動作制御を行う装置および方法に用いて好適なものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、農家人口の減少に伴い、生産性の高い農作業技術を実現することが求められている。これに対し、例えば、自律走行をしながら作業機で所定の作業を行う自律走行車両(以下、ロボット)の開発と普及が進んでいる。農作業には、ロボットによる作業のみで実施されるもののほか、ロボットと人との協調により実施されるものがある。後者の一例として、ロボットが作物を掘り起こした後に作業者が作物を拾い上げる作業が挙げられる。
【0003】
作業者がロボットの近傍でロボットと協調して作業を行う場合、作業者がロボットに接近しすぎることによる接触事故が発生する可能性がある。そのため、作業者がロボットから所定距離以内のエリア(以下、接触危険エリアという)に近づいたことを検出して作業機を停止させるといった安全機能をロボットに搭載することが求められる。ここで、接触危険エリアをどの程度の大きさとするかは、安全性と作業能率との観点から重要事項の1つと言える。
【0004】
しかしながら、安全性を重視する観点から接触危険エリアを広くすると、作業者のロボットへの接近により作業機の停止が頻発し、作業能率が低下してしまう。また、ロボットと作業者とが離れすぎることにより、作業者によるロボット動作の確認が困難となり、ロボットの故障や作業ミス等の確認が遅れた場合に作業能率が低下してしまうという問題もあった。一方、作業能率を重視する観点から接触危険エリアを狭くすると、十分な安全性が担保されなくなるおそれが生じてしまう。
【0005】
なお、特定の作業者以外の人に対する安全性を向上させながら、過剰な警告の発生を防いで、作業車両による作業能率を向上させるようにした安全システムが知られている(例えば、特許文献1参照)。この特許文献1に記載の安全システムでは、作業車両の周囲の警告エリア内で作業する特定の作業者(安全教育を受けた安全意識の高い作業者)を識別し、この識別された特定の作業者を警告の対象外として設定し、警告エリア内にいる警告対象の人(安全意識の低い作業者や来訪者)を検出したときに、作業車両の運転者に警告をする。
【0006】
この特許文献1に記載の安全システムを用いれば、安全意識の低い作業者や来訪者が警告エリアに入ったときは作業車両の運転者に警告をし、運転者の手動操作で作業機を停止させるなどの危険回避策をとることが可能となる。しかしながら、安全性を重視して警告エリアを広くすると、警告が頻発して作業能率が低下してしまう恐れがある。一方、作業能率を重視する観点から警告エリアを狭くすると、十分な安全性が担保されなくなるおそれが生じてしまう。また、特許文献1に記載の安全システムでは、安全意識の高い作業者の場合は警告の対象とされないため、安全意識の高い作業者が作業車両に接近しすぎることによる接触事故の発生を防ぐことができない。
【先行技術文献】
【特許文献】
【0007】
特開2020-125171号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上述のような問題を解決するために成されたものであり、十分な安全性を担保しつつ、作業者の作業車両への接近により作業機が頻繁に停止することを防いで作業能率を向上させることができるようにすることを目的とする。
【課題を解決するための手段】
【0009】
上記した課題を解決するために、本発明では、作業車両の後方で作業をする作業者の作業車両からの距離または相対位置の状態変化を検出し、当該検出される状態変化に応じて、作業車両の走行速度を制御するようにしている。
【発明の効果】
【0010】
上記のように構成した本発明によれば、作業者が接触危険エリア(作業者が入ったときに作業機を停止させるエリア)に近づいたときに、走行速度を制御して作業車両が作業者から離れるようにすることができる。このため、接触危険エリアを広くしなくても、作業者が作業車両に接近しすぎることによる接触事故の発生を防ぐことができる。また、作業者が接触危険エリアに入ることによる作業機の頻繁な停止も防ぐことができる。これにより、本発明によれば、十分な安全性を担保しつつ、作業者の作業車両への接近により作業機が頻繁に停止することを防いで作業能率を向上させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
産卵床
13日前
個人
動物飼育用ケージ
20日前
個人
水中装飾品
7日前
個人
猫用のトイレ
20日前
個人
水中生物採集器
13日前
株式会社シマノ
釣竿
8日前
個人
ペットケア補助具
1日前
株式会社大垣化工
糸収容具
21日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
苗移植機
20日前
井関農機株式会社
作業車両
20日前
株式会社大貴
動物用トイレ
13日前
みのる産業株式会社
作業台車
22日前
ロンタイ株式会社
植生体
20日前
井関農機株式会社
乗用型作業機
8日前
井関農機株式会社
乗用型苗植機
23日前
井関農機株式会社
資材散布装置
1日前
井関農機株式会社
防除システム
27日前
個人
水田用除草機器および水田用除草体
21日前
MWPO株式会社
キャットタワー
13日前
住友林業株式会社
樹木の支持構造
1日前
有限会社伊藤テクノリサーチ
防草施工方法
14日前
個人
農業又は園芸ハウス用換気装置
7日前
株式会社クボタ
田植機
20日前
株式会社 ジークラック
ルアー
21日前
株式会社クボタ
降雨制御システム
21日前
個人
豚舎、およびそれを利用した養豚方法
21日前
アース製薬株式会社
線香
27日前
群馬県
太陽光発電環境システム
13日前
グローブライド株式会社
魚釣用リール
6日前
株式会社シマノ
釣針外し器
27日前
鹿島建設株式会社
藻場の造成装置
20日前
井関農機株式会社
複数作業車の連携制御システム
14日前
井関農機株式会社
コンバインの走行制御システム
7日前
三菱マヒンドラ農機株式会社
管理システム
27日前
カゴメ株式会社
収穫システム及びそれに用いる分離装置
8日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ