TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053386
公報種別
公開特許公報(A)
公開日
2024-04-15
出願番号
2022159622
出願日
2022-10-03
発明の名称
位置推定システム及び位置推定方法
出願人
株式会社IHI
,
IHI運搬機械株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
11/00 20060101AFI20240408BHJP(測定;試験)
要約
【課題】 コイルの積載状態又は光沢に起因したコイルの位置の推定精度の低下を抑える位置推定システムを提供する。
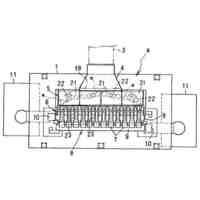
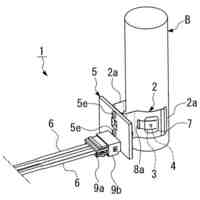
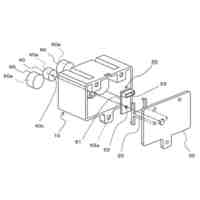
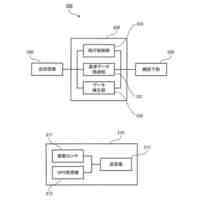
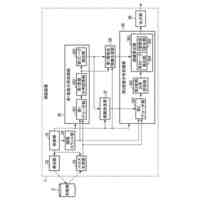
【解決手段】 位置推定システムは、トロリ4に設置され、レーザLaを用いて床面100の側にある物体までの距離をスキャン計測する距離センサ6aと、床面100の側に載置されている少なくとも1つのコイルCを位置推定対象として特定し、位置推定対象の横断面方向に沿って、トロリ4を移動させながら距離センサ6aにスキャン計測させ、計測点PmごとにレーザLaが位置推定対象のコイル中心Axの高さHを通過した点を仮想通過点Pvとして算出し、位置推定対象に最も近い側にある仮想通過点Pvを、位置推定対象の横断面方向でのコイル端部Peとなり得る端部候補点Pcとして抽出し、端部候補点Pcから推定されたコイル端部Peに基づいて位置推定対象の位置を導出する制御演算部8と、を備える。
【選択図】 図10
特許請求の範囲
【請求項1】
中心軸が床面と平行となる姿勢で載置されているコイルの位置を推定する位置推定システムであって、
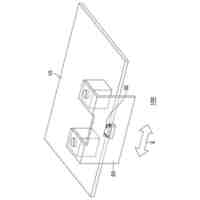
前記コイルを吊って移動するトロリに設置され、レーザを用いて前記床面の側にある物体までの距離をスキャン計測する距離センサと、
前記床面の側に載置されている少なくとも1つの前記コイルを位置推定対象として特定し、前記位置推定対象の横断面方向に沿って、前記トロリを移動させながら前記距離センサにスキャン計測させ、計測点ごとに前記レーザが前記位置推定対象のコイル中心の高さを通過した点を仮想通過点として算出し、前記位置推定対象に最も近い側にある前記仮想通過点を、前記位置推定対象の前記横断面方向でのコイル端部となり得る端部候補点として抽出し、当該端部候補点から推定された前記コイル端部に基づいて前記位置推定対象の前記位置を導出する制御演算部と、
を備える、位置推定システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御演算部は、前記距離センサが複数の位置から計測することで得られた計測データを用いて前記コイル端部をそれぞれ推定し、推定された複数の前記コイル端部の値に対して統計処理を実行することで前記位置推定対象の前記位置の推定に用いられる前記コイル端部を特定する、請求項1に記載の位置推定システム。
【請求項3】
前記制御演算部は、複数の当該仮想通過点を互いに近接するもの同士で複数のグループに分け、複数のフレームごとに算出された前記仮想通過点の算出結果に基づいて、複数の前記グループの中で前記位置推定対象に最も近い側にある前記グループを特定し、特定された前記グループに含まれる複数の前記仮想通過点から抽出された前記端部候補点に基づいて、前記位置推定対象の前記位置の推定に用いられる前記コイル端部を特定する、請求項1又は2に記載の位置推定システム。
【請求項4】
前記制御演算部は、前記距離センサから照射された前記レーザが前記位置推定対象の側面と接するときの接線角度に起因する、前記コイル中心の前記高さでの前記仮想通過点と前記コイル端部との間のずれ量を求め、前記端部候補点に前記ずれ量を反映させることで前記コイル端部を推定する、請求項1又は2に記載の位置推定システム。
【請求項5】
中心軸が床面と平行となる姿勢で載置されているコイルの位置を推定する位置推定方法であって、
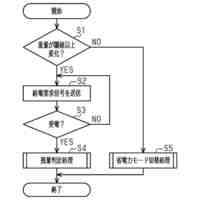
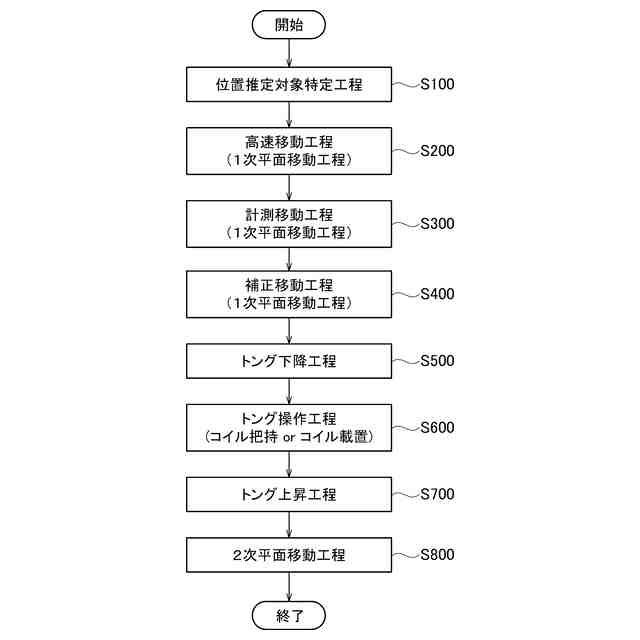
前記床面の側に載置されている少なくとも1つの前記コイルを位置推定対象として特定する位置推定対象特定工程と、
前記位置推定対象の横断面方向に沿って、前記コイルを吊って移動するトロリを移動させながら、前記トロリに設置されている距離センサにレーザを用いて前記床面の側にある物体までの距離をスキャン計測させる計測工程と、
前記計測工程で計測された計測点ごとに、前記レーザが前記位置推定対象のコイル中心の高さを通過した点を仮想通過点として算出する仮想通過点算出工程と、
前記位置推定対象に最も近い側にある前記仮想通過点を、前記位置推定対象の前記横断面方向でのコイル端部となり得る端部候補点として抽出する端部候補点抽出工程と、
前記端部候補点から推定された前記コイル端部に基づいて、前記位置推定対象の前記位置を導出するコイル位置導出工程と、
を有する、位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置推定システム及び位置推定方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、例えば建屋内において、鋼板コイル等のコイルを吊りながら搬送するクレーン等の搬送装置がある。建屋内の敷地では、複数のコイルが、各々の中心軸が床面と平行となるような、いわゆる横置きの姿勢で、2段又は3段程度に積載される。そのため、搬送装置は、すでに載置されている特定のコイルを自動で吊り上げて搬出する場合には、少なくとも当該コイルの位置を把握する必要がある。一方、搬送装置は、特定のコイルを目標位置に自動で吊り下げて搬入する場合には、少なくとも目標位置周辺にある土台となるコイルの位置を把握する必要がある。
【0003】
特許文献1は、スリット状の光を用いてコイルの外周の位置を計測し、計測値を円の方程式に代入して最小2乗法で解くことでコイルの中心位置等を算出する位置・形状認識装置に関する技術を開示している。また、特許文献2は、距離センサを移動させながら直下の物体までの距離を計測させ、距離プロファイルの基準値に対して所定の設定量だけ変化した正及び負の距離変化量の位置に基づいてロール体の中心位置を計測する方法に関する技術を開示している。
【先行技術文献】
【特許文献】
【0004】
特開平9-145315号公報
特開2001-335281号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、複数のコイルが積載されているとき、位置を特定したいコイルの斜め上段に、予め別のコイルが載置されていることもあり得る。この場合、特許文献1に開示されている認識装置では、上段側のコイルによって距離センサの測定範囲の一部が遮られることがある。このとき、コイルが光沢のある鋼板コイルである場合などで、迷光又は複数反射等の光学的事象により、距離センサによる計測データに大きな誤差が生じると、結果としてコイルの位置の推定精度が低下するおそれがある。特に、コイルの横断面方向での他方の片側の計測データが無いことから、横断面方向での位置ずれが大きくなることが想定される。
【0006】
特許文献2に開示されている計測方法では、未検出範囲が広いため、コイル端部に相当する、距離変化量が最大となる位置を正確に算出することが難しい。また、特許文献2に開示されている計測方法でも、位置を特定したいロール体の斜め上段に予め別のロール体が載置されている場合、位置を特定したいロール体の横断面方向での一方の片側しか検出されない。特に、距離センサから照射されたレーザがロール体に当たる角度が浅くなると、レーザがロール体に当たっているにも関わらず計測不可となり、情報が疎になる部分が境界付近で発生する。そのため、このような積載状態下では、実際上、正又は負の距離変化量の位置のいずれかを検出することができず、結果としてロール体の中心位置を精度よく計測することができないおそれがある。更に、ロール体が光沢のある鋼板コイルである場合、迷光又は複数反射等の光学的事象により、距離センサによる計測データに大きな誤差が生じるおそれもある。
【0007】
そこで、本開示は、コイルの積載状態又は光沢に起因したコイルの位置の推定精度の低下を抑える位置推定システム及び位置推定方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
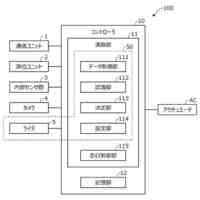
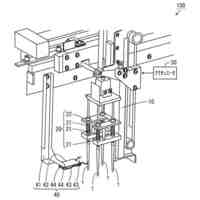
本開示の一態様は、中心軸が床面と平行となる姿勢で載置されているコイルの位置を推定する位置推定システムであって、コイルを吊って移動するトロリに設置され、レーザを用いて床面の側にある物体までの距離をスキャン計測する距離センサと、床面の側に載置されている少なくとも1つのコイルを位置推定対象として特定し、位置推定対象の横断面方向に沿って、トロリを移動させながら距離センサにスキャン計測させ、計測点ごとにレーザが位置推定対象のコイル中心の高さを通過した点を仮想通過点として算出し、位置推定対象に最も近い側にある仮想通過点を、位置推定対象の横断面方向でのコイル端部となり得る端部候補点として抽出し、端部候補点から推定されたコイル端部に基づいて位置推定対象の位置を導出する制御演算部と、を備える。
【0009】
上記の位置推定システムでは、制御演算部は、距離センサが複数の位置から計測することで得られた計測データを用いてコイル端部をそれぞれ推定し、推定された複数のコイル端部の値に対して統計処理を実行することで位置推定対象の位置の推定に用いられるコイル端部を特定してもよい。制御演算部は、複数の仮想通過点を互いに近接するもの同士で複数のグループに分け、複数のフレームごとに算出された前記仮想通過点の算出結果に基づいて、複数のグループの中で位置推定対象に最も近い側にあるグループを特定し、特定されたグループに含まれる複数の仮想通過点から抽出された端部候補点に基づいて、位置推定対象の位置の推定に用いられるコイル端部を特定してもよい。また、制御演算部は、距離センサから照射されたレーザが位置推定対象の側面と接するときの接線角度に起因する、コイル中心の高さでの仮想通過点とコイル端部との間のずれ量を求め、端部候補点にずれ量を反映させることでコイル端部を推定してもよい。
【0010】
本開示の他の態様は、中心軸が床面と平行となる姿勢で載置されているコイルの位置を推定する位置推定方法であって、床面の側に載置されている少なくとも1つのコイルを位置推定対象として特定する位置推定対象特定工程と、位置推定対象の横断面方向に沿って、コイルを吊って移動するトロリを移動させながら、トロリに設置されている距離センサにレーザを用いて床面の側にある物体までの距離をスキャン計測させる計測工程と、計測工程で計測された計測点ごとに、レーザが位置推定対象のコイル中心の高さを通過した点を仮想通過点として算出する仮想通過点算出工程と、位置推定対象に最も近い側にある仮想通過点を、位置推定対象の横断面方向でのコイル端部となり得る端部候補点として抽出する端部候補点抽出工程と、端部候補点から推定されたコイル端部に基づいて、位置推定対象の位置を導出するコイル位置導出工程と、を有する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
センサユニット
11日前
株式会社チノー
放射温度計
12日前
個人
コンベックスルール用測定部品
18日前
株式会社テイエルブイ
処理装置
5日前
トヨタ自動車株式会社
給水治具
17日前
大和製衡株式会社
組合せ計量装置
10日前
TDK株式会社
ガスセンサ
3日前
大和製衡株式会社
組合せ計量装置
10日前
大和製衡株式会社
組合せ計量装置
10日前
三菱マテリアル株式会社
温度センサ
17日前
住友金属鉱山株式会社
検査装置
10日前
ニシム電子工業株式会社
液位検出装置
11日前
太陽誘電株式会社
匂いセンサシステム
3日前
株式会社ティアンドデイ
温度測定装置
17日前
豊田合成株式会社
重量測定装置
17日前
住友金属鉱山株式会社
セレン評価方法
10日前
トヨタ自動車株式会社
表示装置
11日前
笹田磁気計測研究所株式会社
磁気傾度計
12日前
株式会社ダイナックス
電流検出器
10日前
マグネデザイン株式会社
GSR素子の製造方法
5日前
トヨタ自動車株式会社
情報処理装置
11日前
本田技研工業株式会社
外界認識装置
12日前
株式会社島津製作所
分注装置
18日前
マグネデザイン株式会社
磁界検出素子の製造方法
5日前
株式会社ティアンドデイ
携帯型温度測定装置
17日前
個人
注いでいる時に同時的に残量がわかる液体容器
11日前
群馬県
音響診断センサユニット
4日前
株式会社アイティーコスモス
センサシステム
10日前
株式会社トクヤマ
磁性粒子を用いた試料前処理方法
12日前
キヤノン株式会社
測距装置
4日前
ヤマサ醤油株式会社
TSH受容体阻害活性の測定方法
17日前
河村電器産業株式会社
感震センサ
17日前
株式会社アイティーコスモス
振動検出ユニット
10日前
個人
メータ番号を発信するメータの自動検針システム
10日前
ウェルサイン株式会社
検査キット及び検査方法
5日前
日本航空電子工業株式会社
装置及び防振マウント
4日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ