TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024052434
公報種別
公開特許公報(A)
公開日
2024-04-11
出願番号
2022159148
出願日
2022-09-30
発明の名称
送光器および測量システム、および自動で追尾を再開する方法
出願人
株式会社トプコン
代理人
弁理士法人あお葉国際特許事務所
,
個人
,
個人
,
個人
,
個人
主分類
G01C
15/00 20060101AFI20240404BHJP(測定;試験)
要約
【課題】 自動で送光口を測量機へ向ける送光器を提供する。
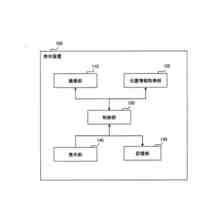
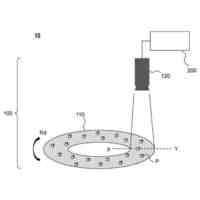
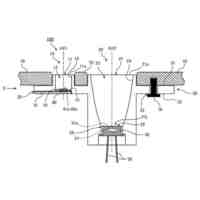
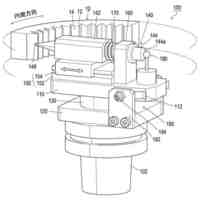
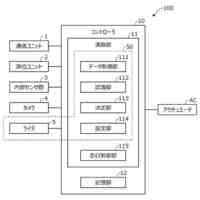
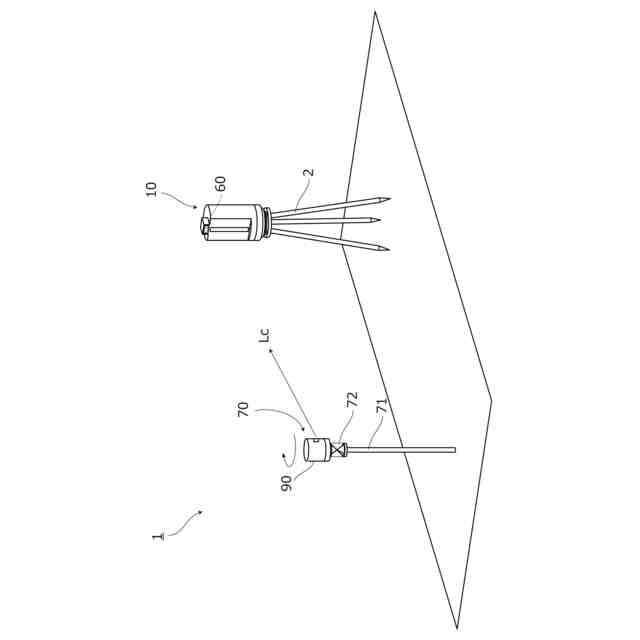
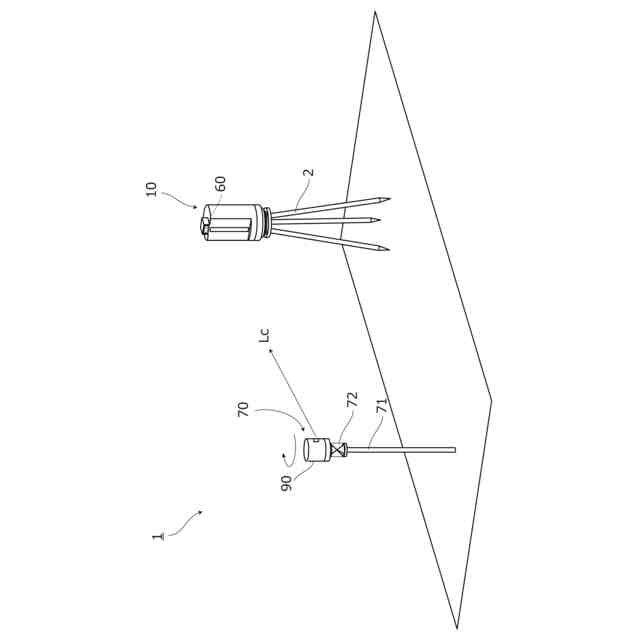
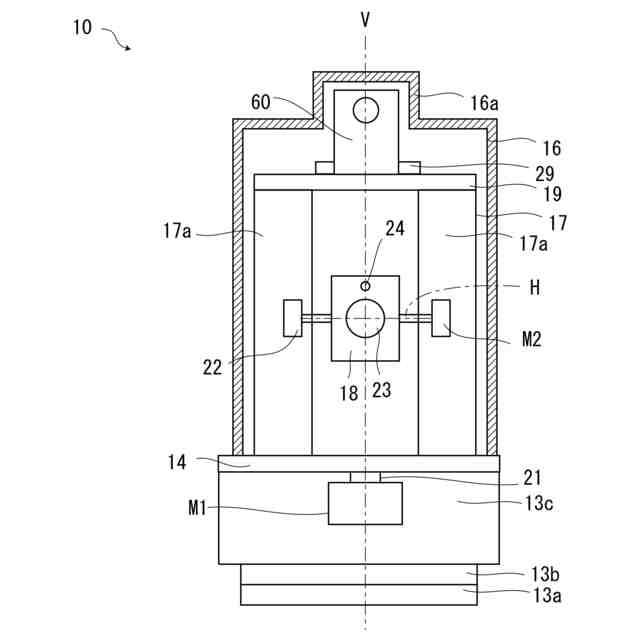
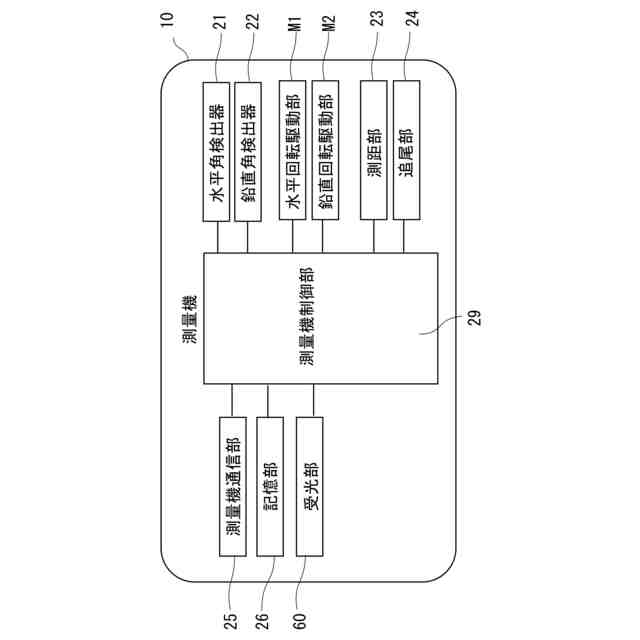
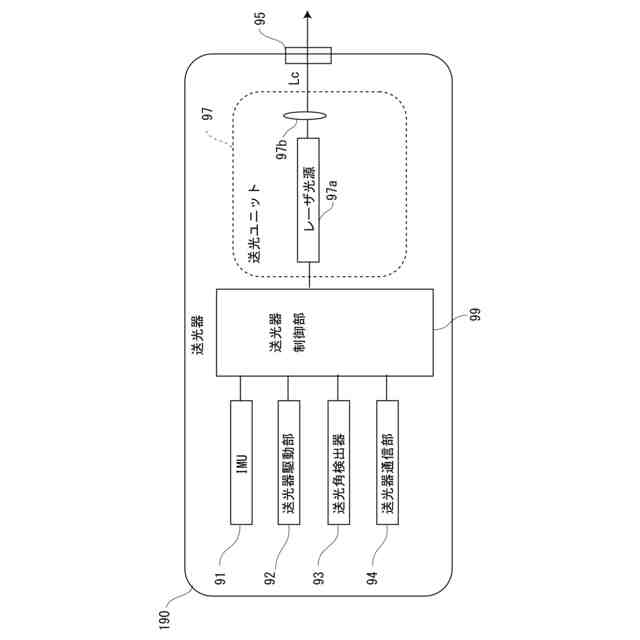
【解決手段】 追尾ガイド光を送光する送光器本体と、前記送光器本体を水平回転駆動する駆動部と、前記送光器本体の3軸方向の加速度を計測する慣性計測装置と、前記送光器本体の回転角度を検知する角度検出器と、情報を送受信する送光器通信部と、前記慣性計測装置の計測値および前記角度検出器の演算処理、前記送光器通信部の制御、前記送光器本体の前記追尾ガイド光の送光の制御、および前記駆動部の回転を制御する送光器制御部とを備え、前記送光器制御部は、前記送光器通信部により、測量機の水平方向角を受信するとともに、前記慣性計測装置の計測値および前記角度検出器の計測値から、前記追尾ガイド光の送光方向と前記測量機への方位角との差分を角度として演算して、前記測量機へ前記追尾ガイド光の送光方向が向くように前記駆動部を回転駆動させて、前記追尾ガイド光を送光する送光器を提供する。
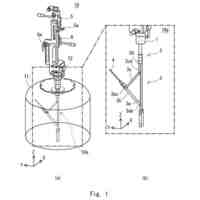
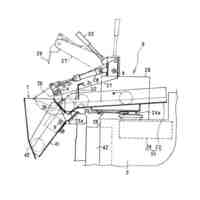
【選択図】図1
特許請求の範囲
【請求項1】
追尾ガイド光を送光する送光器本体と、前記送光器本体を水平回転駆動する駆動部と、前記送光器本体の3軸方向の加速度を計測する慣性計測装置と、前記送光器本体の回転角度を検知する角度検出器と、情報を送受信する送光器通信部と、前記慣性計測装置および前記角度検出器の計測値の演算処理、前記送光器通信部の制御、前記送光器本体の前記追尾ガイド光の送光の制御、および前記駆動部の回転を制御する送光器制御部と、
を備え、
前記送光器制御部は、前記送光器通信部により、測量機から前記送光器本体への水平方向角および前記送光器本体の第1移動方向を受信するとともに、前記慣性計測装置の計測値および前記角度検出器の計測値から、前記追尾ガイド光の送光方向と前記測量機への方位角との差分を角度として演算して、前記測量機へ前記追尾ガイド光の送光方向が向くように前記駆動部を回転駆動させて、前記追尾ガイド光を送光する、
ことを特徴とする送光器。
続きを表示(約 1,600 文字)
【請求項2】
前記送光器制御部は、前記慣性計測装置の計測値から前記送光器の第2移動方向を演算して、
前記第1移動方向および前記第2移動方向を合致させ、前記測量機への水平方位角との差分を角度として演算する、
ことを特徴とする請求項1に記載の送光器。
【請求項3】
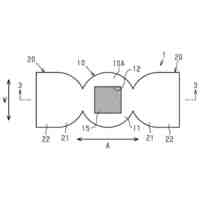
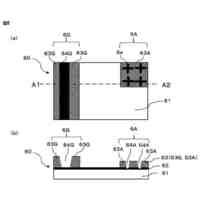
前記追尾ガイド光は、前記送光方向を中心として、水平方向に左方領域と右方領域で異なる周波数で発光し、前記送光方向を含む領域では、前記左方領域の周波数とも前記右方領域の周波数とも異なる周波数で発光する、
ことを特徴とする請求項1または請求項2に記載の送光器。
【請求項4】
追尾ガイド光を送光する送光器本体と、前記送光器本体を水平回転駆動する駆動部と、前記送光器本体の3軸方向の加速度を計測する慣性計測装置と、前記送光器本体の回転角度を検知する角度検出器と、情報を送受信する送光器通信部と、前記慣性計測装置および前記角度検出器の計測値の演算処理、前記送光器通信部の制御、前記送光器本体の前記追尾ガイド光の送光の制御、および前記駆動部の回転を制御する送光器制御部とを有する送光器と、
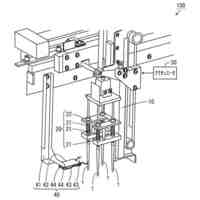
前記送光器に取付けられるプリズムと、
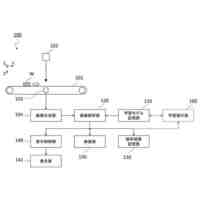
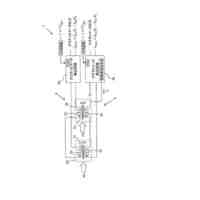
前記追尾ガイド光を受光する受光部と、前記送光器通信部と通信可能な測量機通信部とを有し、前記プリズムを測距・測角する測距・測角機能および追尾機能を有する測量機と、
を備え、
前記送光器制御部は、前記送光器通信部により、前記測量機から前記送光器本体への水平方向角および前記送光器本体の第1移動方向、前記慣性計測装置の計測値および前記角度検出器の計測値から、前記追尾ガイド光の送光方向と前記測量機への方位角との差分を角度として演算して、前記測量機へ前記追尾ガイド光の送光方向が向くように前記駆動部を回転駆動させて、前記追尾ガイド光を送光する、
ことを特徴とする測量システム。
【請求項5】
追尾ガイド光を送光する送光器本体と、前記送光器本体を水平回転駆動する駆動部と、前記送光器本体の3軸方向の加速度を計測する慣性計測装置と、前記送光器本体の回転角度を検知する角度検出器と、情報を送受信する送光器通信部と、前記慣性計測装置の計測値および前記角度検出器の演算処理、前記送光器通信部の制御、前記送光器本体の前記追尾ガイド光の送光の制御、および前記駆動部の回転を制御する送光器制御部とを有する送光器と、
前記送光器に取付けられるプリズムと、
前記追尾ガイド光を受光する受光部と、前記送光器通信部と通信可能な測量機通信部とを有し、前記プリズムを測距・測角する測距・測角機能および追尾機能を有する測量機と、
を備え、追尾が外れた場合に、自動で追尾を再開する方法であって、
(a)前記送光器通信部により、前記測量機から、前記測量機から前記送光器本体への水平方向角および前記送光器本体の第1移動方向を受信するステップと、
(b)前記送光器制御部が、前記慣性計測装置の計測値および前記角度検出器の計測値から、前記追尾ガイド光の送光方向と前記測量機への方位角との差分を角度として演算してするステップと、
(c)前記送光器制御部が、前記送光器本体の前記追尾ガイド光の送光方が、前記測量機へ向くように、前記角度だけ、前記駆動部を回転駆動させるステップと、
(d)前記送光器制御部が、前記送光器本体の前記追尾ガイド光の送光を実施させるステップと、
(e)前記受光部が、前記追尾ガイド光を受光する受光して、前記送光器の中心の方向を検知して、前記測量機が鉛直方向にプリズムサーチを実施して前記プリズムをロックするステップと、
を備えることを特徴とする自動で追尾を再開する方法。
発明の詳細な説明
【技術分野】
【0001】
本願発明は、送光器、および測量システム、および自動で追尾を再開する方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
自動追尾装置を備えている測量機がある(例えば特許文献1)。追尾が外れた場合、特許文献1では、プリズムが装着されたポールを把持している作業者が光送信器を持ち、光送信器で測量機に向けて光で送信信号(追尾ガイド光)を送る。そして測量機は送信信号を受光して、送信信号の到来方向を検知して、望遠鏡を到来方向へ向ける。これにより迅速に測量機にプリズムをロックさせ、再び追尾させることができる。
【先行技術文献】
【特許文献】
【0003】
特許3075384号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記方法では、追尾が外れてしまったときに、作業者が測量作業の手を止めて、測量機にリモコンの送光口を向けてスイッチを押して送信信号を送らねばならず、作業者には手間がかかり煩わしかった。
【0005】
本件は、このような問題に鑑みてなされたものであり、自動で送光口を測量機へ向ける送光器、測量システム、および自動で追尾を再開する方法に関する。
【課題を解決するための手段】
【0006】
上記問題を解決するため、本開示のある態様においては、追尾ガイド光を送光する送光器本体と、前記送光器本体を水平回転駆動する駆動部と、前記送光器本体の3軸方向の加速度を計測する慣性計測装置と、前記送光器本体の回転角度を検知する角度検出器と、情報を送受信する送光器通信部と、前記慣性計測装置の計測値および前記角度検出器の演算処理、前記送光器通信部の制御、前記送光器本体の前記追尾ガイド光の送光の制御、および前記駆動部の回転を制御する送光器制御部とを備え、前記送光器制御部は、前記送光器通信部により、前記測量機から前記送光器本体への水平方向角および前記送光器本体の第1移動方向を受信するとともに、前記慣性計測装置の計測値および前記角度検出器の計測値から、前記追尾ガイド光の送光方向と前記測量機への方位角との差分を角度として演算して、前記測量機へ前記追尾ガイド光の送光方向が向くように前記駆動部を回転駆動させて、前記追尾ガイド光を送光するように送光器を構成した。
【0007】
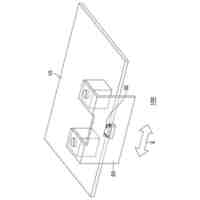
また、ある態様においては、前記送光器制御部は、前記慣性計測装置の計測値から前記送光器の第2移動方向を演算して、前記第1移動方向および前記第2移動方向を合致させ、前記測量機への水平方位角との差分を角度として演算するように構成した。
【0008】
また、ある態様においては、前記追尾ガイド光は、前記送光方向を中心として、水平方向に左方領域と右方領域で異なる周波数で発光し、前記送光方向を含む領域では、前記左方領域の周波数とも前記右方領域の周波数とも異なる周波数で発光するように構成した。
【0009】
また、ある態様においては、追尾ガイド光を送光する送光器本体と、前記送光器本体を水平回転駆動する駆動部と、前記送光器本体の3軸方向の加速度を計測する慣性計測装置と、前記送光器本体の回転角度を検知する角度検出器と、情報を送受信する送光器通信部と、前記慣性計測装置の計測値および前記角度検出器の演算処理、前記送光器通信部の制御、前記送光器本体の前記追尾ガイド光の送光の制御、および前記駆動部の回転を制御する送光器制御部とを有する送光器と、前記送光器に取付けられるプリズムと、前記追尾ガイド光を受光する受光部と、前記送光器通信部と通信可能な測量機通信部とを有し、追尾機能、および前記プリズムを測距・測角する測距・測角機能を有する測量機とを備え、前記送光器制御部は、前記送光器通信部により、前記測量機から前記送光器本体への水平方向角および前記送光器本体の第1移動方向を受信し、前記慣性計測装置の計測値および前記角度検出器の計測値から、前記追尾ガイド光の送光方向と前記測量機への方位角との差分を角度として演算して、前記測量機へ前記追尾ガイド光の送光方向が向くように前記駆動部を回転駆動させて、前記追尾ガイド光を送光するように測量システムを構成した。
【0010】
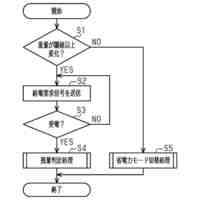
また、ある態様においては、追尾ガイド光を送光する送光器本体と、前記送光器本体を水平回転駆動する駆動部と、前記送光器本体の3軸方向の加速度を計測する慣性計測装置と、前記送光器本体の回転角度を検知する角度検出器と、情報を送受信する送光器通信部と、前記慣性計測装置の計測値および前記角度検出器の演算処理、前記送光器通信部の制御、前記送光器本体の前記追尾ガイド光の送光の制御、および前記駆動部の回転を制御する送光器制御部とを有する送光器と、前記送光器に取付けられるプリズムと、前記追尾ガイド光を受光する受光部と、前記送光器通信部と通信可能な測量機通信部とを有し、追尾機能、および前記プリズムを測距・測角する測距・測角機能を有する測量機とを備え、追尾が外れた場合に、自動で追尾を再開する方法であって、
(a)前記送光器通信部により、前記測量機から、測量機から前記送光器本体への水平方向角および前記送光器本体の第1移動方向を受信するステップと、
(b)前記送光器制御部が、前記慣性計測装置の計測値および前記角度検出器の計測値から、前記追尾ガイド光の送光方向と前記測量機への方位角との差分を角度として演算してするステップと、
(c)前記送光器制御部が、前記送光器本体の前記追尾ガイド光の送光方が、前記測量機へ向くように、前記角度および前記角度検出器の計測値から、前記駆動部を回転駆動させるステップと、
(d)前記送光器制御部が、前記送光器本体の追尾ガイド光の送光を実施させるステップと、
(e)前記受光部が、追尾ガイド光を受光する受光して、前記送光器の中心の方向を検知して、前記追尾部が鉛直方向にプリズムサーチを実施して前記プリズムをロックするステップと、
を備えるように構成した。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
18日前
株式会社CCT
表示装置
17日前
株式会社トプコン
測量装置
23日前
株式会社チノー
放射温度計
10日前
日本精機株式会社
センサユニット
9日前
個人
コンベックスルール用測定部品
16日前
株式会社テイエルブイ
処理装置
3日前
トヨタ自動車株式会社
給水治具
15日前
東将精工株式会社
測定器具補助具
17日前
TDK株式会社
ガスセンサ
1日前
大和製衡株式会社
組合せ計量装置
8日前
大和製衡株式会社
組合せ計量装置
8日前
大和製衡株式会社
組合せ計量装置
8日前
三菱マテリアル株式会社
温度センサ
15日前
東レエンジニアリング株式会社
衝撃試験機
18日前
中部電力株式会社
スミヤ濾紙
23日前
株式会社ミツトヨ
光学式エンコーダ
18日前
住友金属鉱山株式会社
検査装置
8日前
株式会社 システムスクエア
検査装置
17日前
太陽誘電株式会社
匂いセンサシステム
1日前
東レ株式会社
センサー素子及びガスセンサー
22日前
トヨタ自動車株式会社
表示装置
9日前
日立建機株式会社
作業機械
22日前
住友金属鉱山株式会社
セレン評価方法
8日前
ニシム電子工業株式会社
液位検出装置
9日前
株式会社ティアンドデイ
温度測定装置
15日前
豊田合成株式会社
重量測定装置
15日前
マグネデザイン株式会社
GSR素子の製造方法
3日前
笹田磁気計測研究所株式会社
磁気傾度計
10日前
株式会社不二越
歯車寸法測定装置
17日前
株式会社ダイナックス
電流検出器
8日前
本田技研工業株式会社
外界認識装置
10日前
株式会社島津製作所
分注装置
16日前
トヨタ自動車株式会社
情報処理装置
9日前
マグネデザイン株式会社
磁界検出素子の製造方法
3日前
株式会社トクヤマ
磁性粒子を用いた試料前処理方法
10日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ