TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024051268
公報種別
公開特許公報(A)
公開日
2024-04-11
出願番号
2022157331
出願日
2022-09-30
発明の名称
測量システムおよびレーザ受光器
出願人
株式会社トプコン
代理人
弁理士法人あお葉国際特許事務所
,
個人
,
個人
,
個人
,
個人
主分類
G01C
15/00 20060101AFI20240404BHJP(測定;試験)
要約
【課題】レーザ受光器で測量機の機械高を測定する。
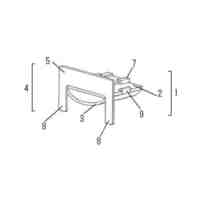
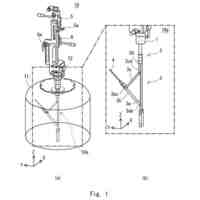
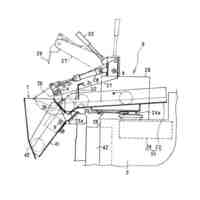
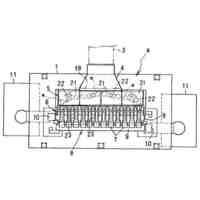
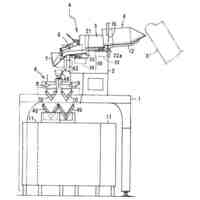
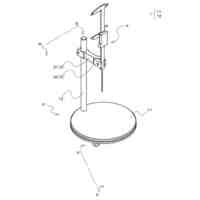
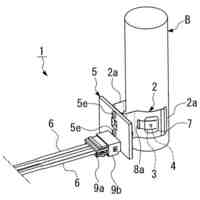
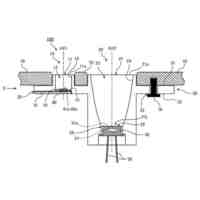
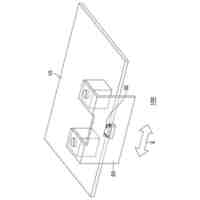
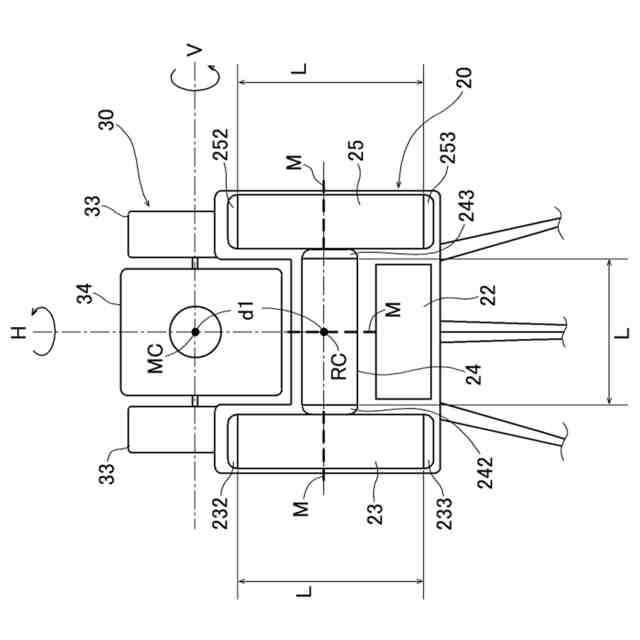
【解決手段】測量システム(1)は、測定基準点(RP2)から高さ(H)で水平にレーザ光(LB)を出す回転レーザ装置(10)と、別の測定基準点(RP1)に設置された測量機(30)と、前記測量機の前面に固定されたレーザ受光器(20)を備え、前記レーザ受光器は、導光体の両端部に受光部を備え、H型に、第1の鉛直受光管(23)、第2の鉛直受光管(25)、水平受光管(24)を備え、前記受光部の各受光信号から前記レーザ光の衝突位置(235)を特定し、中央位置からの差分距離と、前記差分距離が前記中央位置を境にプラス側かマイナス側かを検出し、前記差分距離のプラス/マイナスの組み合わせに応じて、前記レーザ光の高さ(H)と、前記受光器の受光器中心(RC)と前記測量機の機械中心(MC)の中心離距離(d1)と、前記差分距離と、から前記測量機の機械高(h)を測定する。
【選択図】図2
特許請求の範囲
【請求項1】
ある測定基準点からある高さで水平にレーザ光を出射する回転レーザ装置と、
別の測定基準点に設置され機械中心までの機械高を有する測量機と、
前記測量機の前面に固定され、前記レーザ光を受光するレーザ受光器と、を備え、
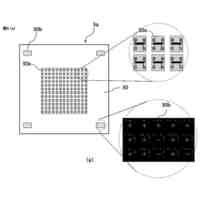
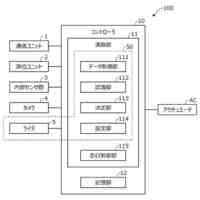
前記レーザ受光器は、受光センサとして,柱状の導光体,前記導光体の両端部に配置された受光部,前記レーザ光を前記導光体の前記両端部に向かって分割する光結合層,を備え、H型に配置された、第1の鉛直受光管、第2の鉛直受光管、および水平受光管と、前記受光部に接続された演算処理部を備え、
前記演算処理部は、
前記受光部の各受光信号から前記レーザ光の衝突位置を特定し、前記衝突位置の前記中央位置からの差分距離と、前記差分距離が前記導光体の長さの中央位置を境にプラス側とマイナス側のどちらにあるかを検出し、
前記第1の鉛直受光管、前記第2の鉛直受光管、および前記水平受光管の前記差分距離のプラス/マイナスの組み合わせに応じて、前記レーザ光の高さと、前記受光器の受光器中心と前記測量機の機械中心の鉛直方向の中心離距離と、前記差分距離と、から前記測量機の前記機械高を測定する
ことを特徴とする測量システム。
続きを表示(約 1,400 文字)
【請求項2】
前記演算処理部は、
前記第1の鉛直受光管と前記第2の鉛直受光管の前記差分距離が同じ値でともにマイナス値の場合は、該差分距離と前記レーザ光の高さと前記中心離距離の和から、前記機械高を算出し、
前記第1の鉛直受光管と前記第2の鉛直受光管の前記差分距離が同じ値でともにプラス値の場合は、該差分距離の絶対値を前記レーザ光の高さと前記中心離距離の和から差し引いて、前記機械高を算出する
ことを特徴とする請求項1に記載の測量システム。
【請求項3】
前記演算処理部は、
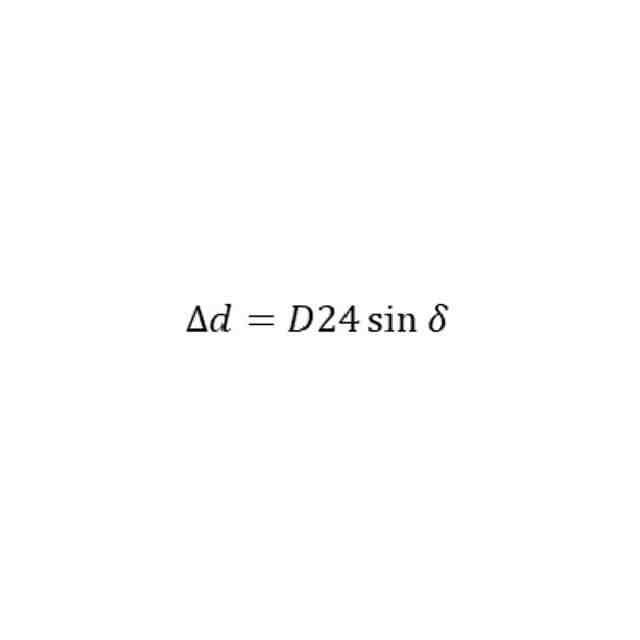
前記第1の鉛直受光管の前記差分距離がプラス値、前記第2の鉛直受光管の前記差分距離がマイナス値、前記水平受光管の前記差分距離がプラスの値の場合と、前記第1の鉛直受光管の前記差分距離がマイナス値、前記第2の鉛直受光管の前記差分距離がプラス値、前記水平受光管の前記差分距離がマイナスの値の場合は、前記水平受光管の差分距離の絶対値の三角関数から求まる前記受光器中心の高さ変化量を前記レーザ光の高さと前記中心離距離の和から差し引いて、前記機械高を算出し、
前記第1の鉛直受光管の前記差分距離がプラス値、前記第2の鉛直受光管の前記差分距離がマイナス値、前記水平受光管の前記差分距離がマイナス値の場合と、前記第1の鉛直受光管の前記差分距離がマイナス値、前記第2の鉛直受光管の前記差分距離がプラス値、前記水平受光管の前記差分距離がプラス値の場合は、前記水平受光管の差分距離の絶対値の三角関数から求まる前記受光器中心の高さ変化量と前記レーザ光の高さと前記中心離距離の和から、前記機械高を算出する
ことを特徴とする請求項1に記載の測量システム。
【請求項4】
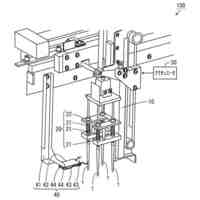
前記レーザ受光器の後面には、後方に延出する左右一対のハンドルが上下方向にスライドロック可能に設けられており、該ハンドルを前記測量機に設けられたフックに固定することで、前記中心離距離が固定となることを特徴とする請求項1に記載の測量システム。
【請求項5】
前記レーザ受光器の後面には、前記測量機に設けられた表示操作部および望遠鏡との干渉を避けるための収容凹部が形成されていることを特徴とする請求項2に記載の測量システム。
【請求項6】
ある測定基準点からある高さで水平に出射されるレーザ光を受光し、別の測定基準点に設置された測量機の前面に固定されたレーザ受光器であって、
前記レーザ受光器は、受光センサとして,柱状の導光体,前記導光体の両端部に配置された受光部,前記レーザ光を前記導光体の前記両端部に向かって分割する光結合層,を備え、H型に配置された、第1の鉛直受光管、第2の鉛直受光管、および水平受光管と、前記受光部に接続された演算処理部を備え、
前記演算処理部は、
前記受光部の各受光信号から前記レーザ光の衝突位置を特定し、前記衝突位置の前記中央位置からの差分距離と、前記差分距離が前記導光体の長さの中央位置を境にプラス側とマイナス側のどちらにあるかを検出し、
前記第1の鉛直受光管、前記第2の鉛直受光管、および前記水平受光管の前記差分距離のプラス/マイナスの組み合わせに応じて、前記レーザ光の高さと、前記受光器の受光器中心と前記測量機の機械中心の鉛直方向の中心離距離と、前記差分距離と、から前記測量機の機械高を測定することを特徴とするレーザ受光器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転レーザ装置からの水平なレーザ光を受光するレーザ受光器に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
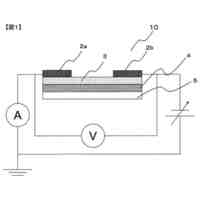
建築・土木・内装工事などの測量作業では、水平出し(レベリング)のために、回転レーザ装置とレーザ受光器が利用されている。回転レーザ装置は、測定基準点に据え付けられ、レーザ光源を備えた回転ヘッドを備え、基準とする高さで水平にレーザ光を旋回させる。レーザ受光器は、受光センサを備えた検出体内でレーザ光の衝突位置を検出して、レーザ光に対するレーザ受光器の高さ方向(鉛直方向)の位置を検出する。例えば特許文献1では、受光センサとして複数のフォトダイオートを鉛直な軸線周りに設け、かつ受光センサを鉛直方向に移動可能に構成することで、測定基準点からの測定点の高低差を算出するレーザ受光器が開示されている。
【0003】
また一方で、測量作業では、トータルステーションや三次元スキャナなどの測量機による測量が行われる。測量機により測定対象物を測定する際には、測量機の設置面から機械中心までの機械高の測定を必要とする場合がある。測量機の機械高は、作業者がメジャー等により手作業で測定することが多いが、測定誤差が生じやすい。これに対し、例えば特許文献2では、測量機の望遠鏡を斜め下方向に向けて、測量機の設置面を測距光でノンプリズム測定することで、測量機の機械高を測定する測量機が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-169921号公報
特開2017-181427号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
回転レーザ装置とレーザ受光器はレベリングの用途で測量現場でよく用いられているものであり,測量機は測定点の座標測定の用途で測量現場でよく用いられるものである。発明者らは、これらの測量現場でよく用いられている機械を利用して、測量機の機械高を測定することは出来ないかと考えた。
【0006】
本発明は、係る課題を解決するためになされたものであり、回転レーザ装置からの水平なレーザ光を受光してレベリングを行うレーザ受光器を利用して、測量機の機械高を測定することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の第1の態様の測量システムは、ある測定基準点からある高さで水平にレーザ光を出射する回転レーザ装置と、別の測定基準点に設置され機械中心までの機械高を有する測量機と、前記測量機の前面に固定され、前記レーザ光を受光するレーザ受光器と、を備え、前記レーザ受光器は、受光センサとして,柱状の導光体,前記導光体の両端部に配置された受光部,前記レーザ光を前記導光体の前記両端部に向かって分割する光結合層,を備え、H型に配置された、第1の鉛直受光管、第2の鉛直受光管、および水平受光管と、前記受光部に接続された演算処理部を備え、前記演算処理部は、前記受光部の各受光信号から前記レーザ光の衝突位置を特定し、前記衝突位置の前記中央位置からの差分距離と、前記差分距離が前記導光体の長さの中央位置を境にプラス側とマイナス側のどちらにあるかを検出し、前記第1の鉛直受光管、前記第2の鉛直受光管、および前記水平受光管の前記差分距離のプラス/マイナスの組み合わせに応じて、前記レーザ光の高さと、前記受光器の受光器中心と前記測量機の機械中心の鉛直方向の中心離距離と、前記差分距離と、から前記測量機の前記機械高を測定する。
【0008】
第2の態様の測量システムでは、第1の態様において、前記演算処理部は、前記第1の鉛直受光管と前記第2の鉛直受光管の前記差分距離が同じ値でともにマイナス値の場合は、該差分距離と前記レーザ光の高さと前記中心離距離の和から、前記機械高を算出し(数式1)、前記第1の鉛直受光管と前記第2の鉛直受光管の前記差分距離が同じ値でともにプラス値の場合は、該差分距離の絶対値を前記レーザ光の高さと前記中心離距離の和から差し引いて、前記機械高を算出する(数式2)のも好ましい。
【0009】
第3の態様の測量システムでは、第1の態様において、前記演算処理部は、前記第1の鉛直受光管の前記差分距離がプラス値、前記第2の鉛直受光管の前記差分距離がマイナス値、前記水平受光管の前記差分距離がプラスの値の場合と、前記第1の鉛直受光管の前記差分距離がマイナス値、前記第2の鉛直受光管の前記差分距離がプラス値、前記水平受光管の前記差分距離がマイナスの値の場合は、前記水平受光管の差分距離の絶対値の三角関数から求まる前記受光器中心の高さ変化量を前記レーザ光の高さと前記中心離距離の和から差し引いて、前記機械高を算出し(数式4)、前記第1の鉛直受光管の前記差分距離がプラス値、前記第2の鉛直受光管の前記差分距離がマイナス値、前記水平受光管の前記差分距離がマイナス値の場合と、前記第1の鉛直受光管の前記差分距離がマイナス値、前記第2の鉛直受光管の前記差分距離がプラス値、前記水平受光管の前記差分距離がプラス値の場合は、前記水平受光管の差分距離の絶対値の三角関数から求まる前記受光器中心の高さ変化量と前記レーザ光の高さと前記中心離距離の和から、前記機械高を算出する(数式5)のも好ましい。
【0010】
第4の態様の測量システムでは、第1~3のいずれかの態様において、前記レーザ受光器の後面には、後方に延出する左右一対のハンドルが上下方向にスライドロック可能に 設けられており、該ハンドルを前記測量機に設けられたフックに固定することで、前記中心離距離が固定となるのも好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
18日前
株式会社CCT
表示装置
17日前
株式会社トプコン
測量装置
23日前
株式会社チノー
放射温度計
10日前
日本精機株式会社
センサユニット
9日前
個人
コンベックスルール用測定部品
16日前
株式会社テイエルブイ
処理装置
3日前
トヨタ自動車株式会社
給水治具
15日前
大和製衡株式会社
組合せ計量装置
8日前
大和製衡株式会社
組合せ計量装置
8日前
TDK株式会社
ガスセンサ
1日前
大和製衡株式会社
組合せ計量装置
8日前
東将精工株式会社
測定器具補助具
17日前
三菱マテリアル株式会社
温度センサ
15日前
東レエンジニアリング株式会社
衝撃試験機
18日前
株式会社ミツトヨ
光学式エンコーダ
18日前
株式会社ティアンドデイ
温度測定装置
15日前
株式会社 システムスクエア
検査装置
17日前
住友金属鉱山株式会社
検査装置
8日前
豊田合成株式会社
重量測定装置
15日前
ニシム電子工業株式会社
液位検出装置
9日前
東レ株式会社
センサー素子及びガスセンサー
22日前
太陽誘電株式会社
匂いセンサシステム
1日前
日立建機株式会社
作業機械
22日前
住友金属鉱山株式会社
セレン評価方法
8日前
トヨタ自動車株式会社
表示装置
9日前
笹田磁気計測研究所株式会社
磁気傾度計
10日前
株式会社不二越
歯車寸法測定装置
17日前
マグネデザイン株式会社
GSR素子の製造方法
3日前
株式会社ダイナックス
電流検出器
8日前
マグネデザイン株式会社
磁界検出素子の製造方法
3日前
本田技研工業株式会社
外界認識装置
10日前
トヨタ自動車株式会社
情報処理装置
9日前
株式会社島津製作所
分注装置
16日前
個人
注いでいる時に同時的に残量がわかる液体容器
9日前
株式会社トクヤマ
磁性粒子を用いた試料前処理方法
10日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ