TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024036022
公報種別
公開特許公報(A)
公開日
2024-03-15
出願番号
2022140712
出願日
2022-09-05
発明の名称
自動運転装置
出願人
国立大学法人広島大学
,
コベルコ建機株式会社
代理人
個人
,
個人
主分類
E02F
3/43 20060101AFI20240308BHJP(水工;基礎;土砂の移送)
要約
【課題】コントローラが作業装置の掘削動作を自動で制御する場合であっても掘削作業の効率が低下することを抑制できる自動運転装置を提供する。
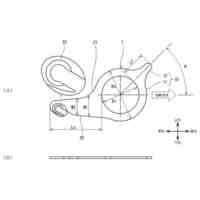
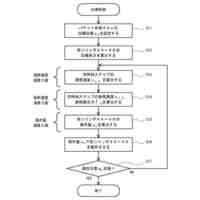
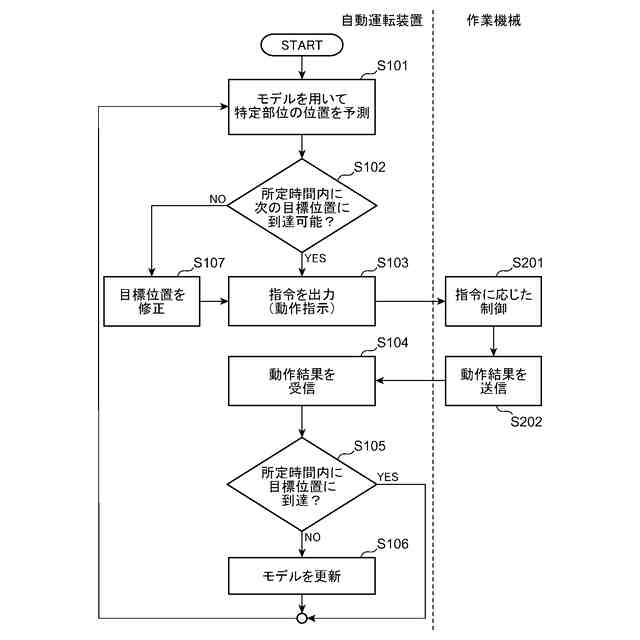
【解決手段】自動運転装置101のコントローラ70は、掘削動作における作業装置3の特定部位SPの目標軌道T上に間隔をおいて並ぶ複数の目標位置を設定し、掘削動作において特定部位SPが複数の目標位置から選ばれる対象目標位置P2に所定時間以内に到達できるか否かを、掘削動作に関する動作情報を用いて判定し、特定部位SPが所定時間以内に対象目標位置P2に到達できないと判定した場合に対象目標位置P2を目標軌道Tから外れた位置に修正し、修正後の対象目標位置P2’に向かって特定部位SPが移動し、その次に、複数の目標位置のうち対象目標位置P2に対して掘削方向の隣に位置する次の目標位置P3に向かって特定部位SPが移動するように掘削動作を制御する。
【選択図】図8
特許請求の範囲
【請求項1】
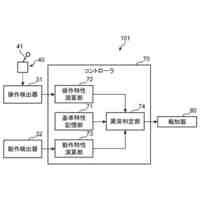
機体と前記機体に支持される作業装置とを備える作業機械を自動運転するための自動運転装置であって、
前記作業装置の掘削動作を制御するコントローラを備え、
前記コントローラは、
前記掘削動作における前記作業装置の特定部位の目標軌道上に間隔をおいて並ぶ複数の目標位置を設定し、
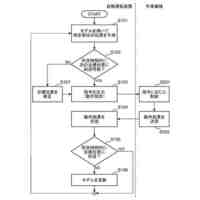
前記掘削動作において前記特定部位が前記複数の目標位置から選ばれる対象目標位置に所定時間以内に到達できるか否かを、前記掘削動作に関する動作情報を用いて判定し、
前記特定部位が前記所定時間以内に前記対象目標位置に到達できないと判定した場合に前記対象目標位置を前記目標軌道から外れた位置に修正し、
修正後の前記対象目標位置に向かって前記特定部位が移動し、その次に、前記複数の目標位置のうち前記対象目標位置に対して掘削方向の隣に位置する次の目標位置に向かって前記特定部位が移動するように前記掘削動作を制御する、自動運転装置。
続きを表示(約 1,100 文字)
【請求項2】
前記コントローラは、前記動作情報を用いて前記作業装置の前記掘削動作を予測し、予測結果に基づいて前記特定部位が前記所定時間以内に前記対象目標位置に到達できるか否かを判定する、請求項1に記載の自動運転装置。
【請求項3】
前記コントローラは、前記掘削動作を予測するための互いに異なる複数のモデルから選ばれる何れかのモデルと前記動作情報とを用いて前記作業装置の前記掘削動作を予測し、予測結果に基づいて前記特定部位が前記所定時間以内に前記対象目標位置に到達できるか否かを判定する、請求項1に記載の自動運転装置。
【請求項4】
前記コントローラは、前記予測結果と前記作業装置の実際の動作結果との比較を行い、前記比較の結果に応じて、前記掘削動作の予測に用いるモデルを、前記複数のモデルから選択される別のモデルに変更する、請求項3に記載の自動運転装置。
【請求項5】
前記複数のモデルのそれぞれは、前記掘削動作における前記作業装置と掘削対象との相互作用に基づいて構築された相互作用モデルであり、前記相互作用モデルは、前記相互作用の質量要素と、前記相互作用のばね要素及び前記相互作用のダンパ要素の少なくとも一方と、を用いて規定される、請求項3に記載の自動運転装置。
【請求項6】
前記動作情報は、前記掘削動作における掘削力に関する情報及び前記掘削動作における掘削距離に関する情報の少なくとも一方を含む、請求項1に記載の自動運転装置。
【請求項7】
前記特定部位は、前記作業装置に含まれるバケットの先端である、請求項1に記載の自動運転装置。
【請求項8】
修正後の前記対象目標位置は、修正前の前記対象目標位置よりも上方の位置で、かつ、前記複数の目標位置のうち前記対象目標位置に対して前記掘削方向の反対の方向の隣に位置する一つ前の目標位置と前記次の目標位置との間の位置である、請求項1に記載の自動運転装置。
【請求項9】
修正後の前記対象目標位置は、前記一つ前の目標位置又は前記特定部位の位置から修正前の前記対象目標位置までの距離と、前記一つ前の目標位置又は前記特定部位の位置から修正後の前記対象目標位置までの距離と、が同じ大きさになるような位置である、請求項8に記載の自動運転装置。
【請求項10】
修正後の前記対象目標位置は、前記一つ前の目標位置又は前記特定部位の位置と修正前の前記対象目標位置とを結ぶ線分と、前記一つ前の目標位置又は前記特定部位の位置と修正後の前記対象目標位置とを結ぶ線分とのなす角度が所定角度となるような位置である、請求項8に記載の自動運転装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械を自動運転する技術に関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
油圧ショベルなどの作業機械は、作業現場において例えば掘削作業を行う。掘削作業の対象である土壌などの掘削対象の特性は、作業現場に応じて様々である。例えば掘削対象の土質の違いは、作業機械が行う掘削動作に対して影響を及ぼす。掘削作業においてオペレータは、土質を感覚的に把握しながらその現場に適するように作業機械を操縦する。近年、オペレータが作業機械を操縦しなくても掘削作業を作業機械に行わせることができる自動運転装置が知られている。このような自動運転装置が作業機械に作業現場の土質に適した掘削動作を行わせるためには、土質を考慮した制御が必要となる。
【0003】
特許文献1は、掘削計画を作成する際に土質の影響を適切に考慮することを目的とする掘削計画作成装置を開示している。この掘削計画作成装置は、土質に係るパラメータを異ならせて機械学習された複数の計画モデルを記憶する記憶部と、土質を推定する土質推定部と、地形情報を取得する地形情報取得部と、前記土質推定部が推定した土質に基づき前記計画モデルを選択し、選択した前記計画モデルに、前記地形情報取得部が取得した地形情報を入力し、前記計画モデルの出力として前記計画値を算出する計画値算出部と、を備える。
【0004】
特許文献2は、自動掘削中、埋設されてる異物をバケットの接触前に検知することを目的とするパワーショベルを開示している。このパワーショベルは、角度センサの計測値からバケットの掘削深さを求め、掘削深さと目標の深さとを比較し、シリンダへの流量を調整することにより自動掘削を行う。次に、パワーショベルは、ロードセルの検出値から掘削抵抗のベクトルを求め、求めたベクトルの異常の有無を、データベースを参照しながら判別して、異物の存在を予知する。異物の存在が予知された場合には、パワーショベルは、掘削をいったん停止し、次いで目標とする深さを修正し、自動掘削を再開する。
【先行技術文献】
【特許文献】
【0005】
特開2021-188362号公報
特開平05-311692号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
掘削対象としての土壌には、硬い土質の領域が局所的に存在することがあり、土砂だけでなく比較的大きな岩などの硬い障害物が局所的に存在することもある。しかし、特許文献1の技術では、このような土壌内に局所的に存在する硬い土質及び障害物については何ら考慮されていない。従って、特許文献1の技術では、掘削作業においてバケットが硬い土質又は障害物に当たると、掘削動作が著しく緩慢になったり、掘削動作が停止したりすることが想定される。この場合、掘削動作の開始から終了までの1サイクルに要する時間が長くなり、掘削作業の効率が低下する。
【0007】
また、特許文献2の技術では、上述したように、異物の存在が予知された場合には、掘削がいったん停止され、目標とする深さが修正された後に自動掘削が再開される。このように掘削作業がいったん停止されると、掘削作業の効率が低下する。また、特許文献2の技術では、自動掘削がいったん停止されると、バケットが上方へ移動される。すなわち、バケットが土壌の浅い位置に移動され、その後、自動掘削が再開される。再開後の自動掘削は、土壌の浅い位置で行われるので、掘削作業において掘削される土量が少なくなり、その結果、掘削作業の効率が低下する。
【0008】
本開示は、コントローラが作業装置の掘削動作を自動で制御する場合であっても掘削作業の効率が低下することを抑制できる自動運転装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
提供されるのは、機体と前記機体に支持される作業装置とを備える作業機械を自動運転するための自動運転装置であって、前記作業装置の掘削動作を制御するコントローラを備え、前記コントローラは、前記掘削動作における前記作業装置の特定部位の目標軌道上に間隔をおいて並ぶ複数の目標位置を設定し、前記掘削動作において前記特定部位が前記複数の目標位置から選ばれる対象目標位置に所定時間以内に到達できるか否かを、前記掘削動作に関する動作情報を用いて判定し、前記特定部位が前記所定時間以内に前記対象目標位置に到達できないと判定した場合に前記対象目標位置を前記目標軌道から外れた位置に修正し、修正後の前記対象目標位置に向かって前記特定部位が移動し、その次に、前記複数の目標位置のうち前記対象目標位置に対して掘削方向の隣に位置する次の目標位置に向かって前記特定部位が移動するように前記掘削動作を制御する。
【0010】
掘削作業において、目標軌道上に、硬い土質、硬い障害物などの硬質領域が局所的に存在する場合、特定部位がその硬質領域に近づくにつれて掘削動作の速度が次第に小さくなったり、掘削動作が停止したりするような状況が生じ得る。このような状況が生じることを抑制するために、本開示に係る自動運転装置のコントローラは、掘削動作に関する動作情報を用いて特定部位が対象目標位置に所定時間以内に到達できるか否かを判定し、特定部位が所定時間以内に対象目標位置に到達できないと判定した場合に対象目標位置を目標軌道から外れた位置に修正し、修正後の対象目標位置に向かって特定部位が移動するように掘削動作を制御する。これにより、修正前の対象目標位置に向かう目標軌道上に前記硬質領域が局所的に存在する場合であっても、コントローラは、その目標軌道から外れた修正後の対象目標位置に向けて特定部位を移動させることができる。従って、作業装置(例えば作業装置のバケット)が前記硬質領域に当たった状態で掘削動作が緩慢になったり掘削動作が停止したりすることを抑制できる。これにより1サイクルの掘削動作に要する時間が長くなることを抑制できる。しかも、コントローラは、修正後の対象目標位置に向かって特定部位が移動し、その次に、前記次の目標位置に向かって特定部位が移動するように掘削動作を制御する。すなわち、前記次の目標位置は、複数の目標位置のうち対象目標位置に対して掘削方向の隣に位置する目標位置であり、目標軌道から外れた位置ではなく、目標軌道上の位置である。従って、目標軌道上に硬質領域が局所的に存在する場合であっても、目標軌道上に設定された複数の目標位置のうち、修正される目標位置の数をできるだけ少なくすることができる。これにより、掘削動作の開始から終了まで特定部位が目標軌道上を移動する理想的な場合に掘削可能な土量(目標土量)に比べて、実際の掘削動作で掘削される土量(実土量)が大きく下回ることを回避できる。言い換えると、目標土量に対する実土量の乖離を小さくすることができる。以上のことから、本開示に係る自動運転装置は、コントローラが作業装置の掘削動作を自動で制御する場合であっても掘削作業の効率が低下することを抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人広島大学
自動運転装置
1か月前
国立大学法人広島大学
縫合糸切断器具
3か月前
国立大学法人広島大学
メチオニン制限剤
4日前
国立大学法人広島大学
筋収縮能回復促進材料
12日前
国立大学法人広島大学
水素生成装置及び水素生成方法
3か月前
国立大学法人広島大学
バクテリオファージ及びその利用
12日前
国立大学法人広島大学
作業機械の制御装置及び作業機械
3か月前
株式会社前川製作所
冷凍システム
1か月前
国立大学法人広島大学
制御装置、制御方法及びプログラム
3か月前
国立大学法人広島大学
経皮的細胞外インピーダンス制御装置
17日前
国立大学法人広島大学
植物由来メラニン様物質及びその利用
1か月前
国立大学法人広島大学
遺伝子増幅反応による残留産物の検出方法
1か月前
三菱ケミカル株式会社
ブロック共重合体
1か月前
国立大学法人広島大学
状態推定装置、状態推定方法及びプログラム
1か月前
コベルコ建機株式会社
制御装置及び制御方法
1か月前
国立大学法人広島大学
作業機械の異常判定装置及びこれを備えた作業機械
3日前
国立大学法人広島大学
化合物、有機薄膜太陽電池材料及び有機薄膜太陽電池
1か月前
堺化学工業株式会社
貴金属担持酸化チタンの製造方法
2日前
国立大学法人広島大学
SARS-CoV-2の濃縮方法及びそのためのキット
4か月前
国立大学法人広島大学
プラズマ発生装置、プラズマ発生方法及びエッチング方法
1か月前
国立大学法人広島大学
テクスチャ生成装置、テクスチャ生成方法及びプログラム
1か月前
国立大学法人広島大学
精子の妊孕力増進剤
1か月前
本田技研工業株式会社
情報処理装置、情報処理方法、及びプログラム
25日前
国立大学法人広島大学
抗炎症能および免疫制御能が改善された間葉系幹細胞またはその培養上清
2か月前
株式会社ビーライズ
臨床能力評価装置、臨床能力評価方法及びプログラム
3か月前
三菱ケミカル株式会社
熱可塑性エラストマー組成物、フィルム、及び成形体
1か月前
中国電力株式会社
有効間隙率測定装置とそれを用いた有効間隙率の測定方法
3か月前
国立大学法人広島大学
閾値下うつ及び/又はプレゼンティーズムの検出を支援するための支援方法、支援装置、支援プログラム、及び支援システム
2か月前
国立研究開発法人国立成育医療研究センター
アンチセンスオリゴヌクレオチドおよび糖原病Ia型予防または治療用組成物
3か月前
個人
杭頭接合部用部材
10日前
株式会社SKT
掘削ロッド
12日前
住友建機株式会社
電動ショベル
2日前
前澤工業株式会社
除塵機
11日前
日鉄建材株式会社
斜面安定化構造
3日前
住友建機株式会社
ショベル
9日前
個人
洪水防止堤防 又は 津波防止堤防
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ