TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024031851
公報種別
公開特許公報(A)
公開日
2024-03-07
出願番号
2023127490
出願日
2023-08-04
発明の名称
制御装置及び制御方法
出願人
コベルコ建機株式会社
,
国立大学法人広島大学
代理人
個人
主分類
E02F
9/20 20060101AFI20240229BHJP(水工;基礎;土砂の移送)
要約
【課題】制御対象の動特性に係る事前情報の精度が低い場合及び液圧アクチュエータの応答に時間遅れがある場合であっても、位置制御及び力制御について高い制御性能を得ることができる制御装置及び制御方法を提供する。
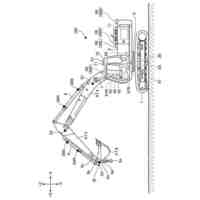
【解決手段】位置制御装置は、制御対象であるショベルを駆動させる各シリンダ44~46を制御する動作指令部と、バケット先端43aの目標位置及び現在位置に基づいて、次時刻ステップに発生されるべき理想速度v
s
,
k
を算出する理想速度演算部と、各シリンダでPID制御を実施した場合に発生可能なアクチュエータ力の範囲で理想速度v
s
,
k
に最も近い参照速度v
r
,
k
と、参照速度v
r
,
k
でPID制御を実施した場合の参照発生力^f
k
とを、各シリンダの準静的特性から算出する参照速度演算部と、各シリンダの準静的特性、参照発生力^f
k
及び参照速度v
r
,
k
に基づいて、操作量u
k
を算出する操作量演算部と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
制御対象である機械を駆動させる液圧アクチュエータを制御する動作指令部と、
前記機械の目標位置及び現在位置に基づいて、前記機械の次時刻ステップに発生されるべき理想速度を算出する理想速度演算部と、
前記液圧アクチュエータでPID制御又はPD制御を実施した場合に発生可能なアクチュエータ力が算出される目標速度のうち、前記理想速度に最も近い速度である参照速度と、前記参照速度を目標速度としてPID制御又はPD制御を実施した場合に発生されるべきアクチュエータ力である参照発生力とを、前記液圧アクチュエータの準静的特性に基づいて算出する参照速度演算部と、
前記液圧アクチュエータの準静的特性、前記参照発生力及び前記参照速度に基づいて、前記液圧アクチュエータの操作量を算出する操作量演算部と、を備える、
ことを特徴とする制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記液圧アクチュエータは、再生回路を備え、
前記理想速度は、前記機械の前記目標位置、前記現在位置、前記再生回路の流量制御バルブの開口度及び前記再生回路を通る作動液の流量の推定値に基づいて算出される、
ことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記機械は、複数の前記液圧アクチュエータで駆動され、
前記操作量演算部は、それぞれの前記液圧アクチュエータについて前記操作量を算出し、
前記動作指令部は、算出された前記操作量に基づいてそれぞれの前記液圧アクチュエータを制御することにより、前記機械の所定部位を目標位置に移動させる、
ことを特徴とする請求項1に記載の制御装置。
【請求項4】
前記機械に加わる外力を推定する外力推定部を備え、
前記参照速度演算部は、前記外力推定部で推定される外力に基づいて前記参照速度及び前記参照発生力を算出する、
ことを特徴とする請求項1に記載の制御装置。
【請求項5】
前記液圧アクチュエータは、油圧アクチュエータである、
ことを特徴とする請求項1から4のいずれか一項に記載の制御装置。
【請求項6】
前記機械が接触する環境から前記液圧アクチュエータが受ける反力と、前記液圧アクチュエータが前記環境に加える力の目標値である目標印加力とを、前記機械の目標動特性を有する仮想物体に入力して、前記仮想物体における前記機械が次時刻ステップにおいて位置すべき参照位置を算出する参照位置演算部を備え、
前記理想速度演算部は、前記参照位置を前記目標位置として前記理想速度を算出する、
ことを特徴とする請求項1に記載の制御装置。
【請求項7】
液圧アクチュエータで駆動される制御対象である機械の目標位置及び現在位置に基づいて、前記機械の次時刻ステップに発生されるべき理想速度を算出する理想速度演算工程と、
前記液圧アクチュエータでPID制御又はPD制御を実施した場合に発生可能なアクチュエータ力が算出される目標速度のうち、前記理想速度に最も近い速度である参照速度と、前記参照速度を目標速度としてPID制御又はPD制御を実施した場合に発生されるべきアクチュエータ力である参照発生力とを、前記液圧アクチュエータの準静的特性に基づいて算出する参照速度演算工程と、
前記液圧アクチュエータの準静的特性、前記参照発生力及び前記参照速度に基づいて、前記液圧アクチュエータの操作量を算出する操作量演算工程と、を含む、
ことを特徴とする制御方法。
【請求項8】
前記機械が接触する環境から前記液圧アクチュエータが受ける反力と、前記液圧アクチュエータが前記環境に加える力の目標値である目標印加力とを、前記機械の目標動特性を有する仮想物体に入力して、前記仮想物体における前記機械が次時刻ステップにおいて位置すべき参照位置を算出する参照位置演算工程を含み、
前記理想速度演算工程では、前記参照位置を前記目標位置として前記理想速度を算出する、
ことを特徴とする請求項7に記載の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、液圧アクチュエータで駆動される制御対象の位置又は制御対象に働く力を制御する制御装置及び制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
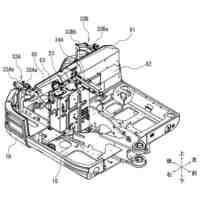
油圧アクチュエータで駆動されるショベル等の機械において、バケット、作業装置等を、目標位置へ自動的に移動させる制御方法が開発されている。油圧アクチュエータを含む液圧アクチュエータの応答特性は、強い非線形性を持ち、リリーフバルブの開閉によっても大きく変化する。したがって、自動的な位置決め制御を、単純な制御則で実現することは難しい。
【0003】
また、液圧アクチュエータで駆動される機械を力制御する場合、具体的には外部環境に接触した制御対象に働く力についてアドミッタンス制御を行う場合においても、液圧アクチュエータの強い非線形性によって単純な制御則で実現することは難しい。
【0004】
特許文献1では、制御対象の動特性の事前情報に基づいて、制御対象の次時刻ステップにおける位置及び速度を予測する予測方程式と、スライディングモード制御則を表す方程式とを連立方程式として解き、操作量である液圧アクチュエータへのバルブ開度指令を算出することにより、制御アルゴリズムを簡素化することとしている。
【先行技術文献】
【特許文献】
【0005】
特開2021-121717号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の制御方法では、液圧アクチュエータへのバルブ開度指令を算出する際、制御対象の動特性を用いることとしている。しかしながら、制御対象の動特性の事前情報が不正確である場合、油圧アクチュエータの応答に時間遅れがある場合等においては、予測方程式の精度を担保することができず、所望の制御特性を得られないおそれがある。
【0007】
本発明は、上述の事情に鑑みてなされたものであり、制御対象の動特性に係る事前情報の精度が低い場合及び液圧アクチュエータの応答に時間遅れがある場合であっても、位置制御又は力制御について高い制御性能を得ることができる制御装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、この発明の第1の観点に係る制御装置は、
制御対象である機械を駆動させる液圧アクチュエータを制御する動作指令部と、
前記機械の目標位置及び現在位置に基づいて、前記機械の次時刻ステップに発生されるべき理想速度を算出する理想速度演算部と、
前記液圧アクチュエータでPID制御又はPD制御を実施した場合に発生可能なアクチュエータ力が算出される目標速度のうち、前記理想速度に最も近い速度である参照速度と、前記参照速度を目標速度としてPID制御又はPD制御を実施した場合に発生されるべきアクチュエータ力である参照発生力とを、前記液圧アクチュエータの準静的特性に基づいて算出する参照速度演算部と、
前記液圧アクチュエータの準静的特性、前記参照発生力及び前記参照速度に基づいて、前記液圧アクチュエータの操作量を算出する操作量演算部と、を備える。
【0009】
また、前記液圧アクチュエータは、再生回路を備え、
前記理想速度は、前記機械の前記目標位置、前記現在位置、前記再生回路の流量制御バルブの開口度及び前記再生回路を通る作動液の流量の推定値に基づいて算出される、
こととしてもよい。
【0010】
また、前記機械は、複数の前記液圧アクチュエータで駆動され、
前記操作量演算部は、それぞれの前記液圧アクチュエータについて前記操作量を算出し、
前記動作指令部は、算出された前記操作量に基づいてそれぞれの前記液圧アクチュエータを制御することにより、前記機械の所定部位を目標位置に移動させる、
こととしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
協和工業株式会社
除塵システム
2日前
住友建機株式会社
電動ショベル
15日前
株式会社エスイー
対土石流構造物
22日前
日鉄建材株式会社
斜面安定化構造
16日前
日立建機株式会社
建設機械
22日前
ヤンマーホールディングス株式会社
作業車両
3日前
住友重機械工業株式会社
ショベル
15日前
個人
丸太等の柱断面にU字型工作物を付設する柱
9日前
ヤマハ化工建設株式会社
オープンケーソン工法
1日前
住友建機株式会社
電動ショベル及びプログラム
15日前
個人
地質試料採取方法
3日前
株式会社ケー・エフ・シー
注入薬液移送システム
15日前
調和工業株式会社
振動補助装置及び施工方法
10日前
住友重機械工業株式会社
作業機械の制御装置
3日前
八千代エンジニヤリング株式会社
気泡発生システム
17日前
岡部株式会社
アンカー用受圧板
16日前
日立建機株式会社
建設機械
16日前
五洋建設株式会社
洗掘防止構造及びその構築方法
15日前
株式会社サン・エンジニア
ミキシングアタッチメント
16日前
株式会社安藤・間
杭の応力算定モデルの設定方法
8日前
株式会社竹内製作所
作業用車両
3日前
株式会社竹内製作所
作業用車両
3日前
株式会社竹内製作所
作業用車両
3日前
株式会社竹内製作所
作業用車両
3日前
住友重機械工業株式会社
ショベル及びショベルの制御装置
15日前
株式会社竹内製作所
作業用車両
3日前
オカダアイヨン株式会社
グラップルバケット装置及び木の切断方法
22日前
株式会社カテックス
インサート構造体及び地山補強工法
10日前
ヤンマーホールディングス株式会社
作業機械
8日前
五洋建設株式会社
鋼製筒状体の傾斜計測装置及び傾斜角計測方法
15日前
株式会社大林組
貫入抵抗低減装置及びサクション構造体の貫入方法
15日前
ヤンマーホールディングス株式会社
電動式作業機械
3日前
株式会社小松製作所
キャブおよび作業車両
8日前
株式会社小松製作所
作業機械および作業機械の制御方法
15日前
株式会社イビコン
ブロック、及び底部部品
3日前
TUS都市開発株式会社
免震装置付き建築物
16日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ