TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023176586
公報種別
公開特許公報(A)
公開日
2023-12-13
出願番号
2022088941
出願日
2022-05-31
発明の名称
誘導装置
出願人
三菱電機株式会社
代理人
個人
主分類
F41G
7/22 20060101AFI20231206BHJP(武器)
要約
【課題】飛しょう体が飛しょうしているときにおける目標変更の許容度を高くすることができる誘導装置を得ること。
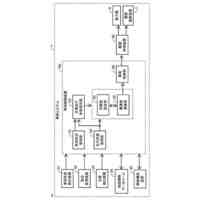
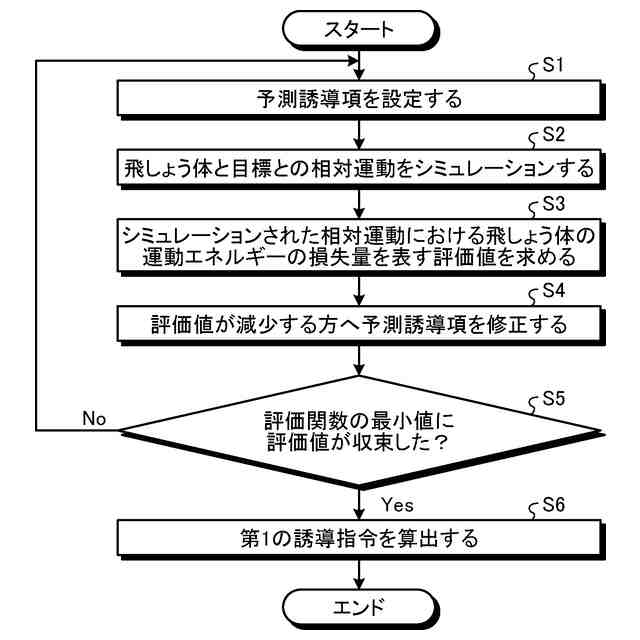
【解決手段】誘導装置1は、飛しょう体の加速度に加算されるバイアス加速度を表す予測誘導項を設定して飛しょう体と目標との相対運動をシミュレーションする運動予測計算処理と、シミュレーションされた相対運動における飛しょう体の運動エネルギーの損失量を表す評価値を求めて、評価値が減少する態様により予測誘導項を修正する評価および予測誘導項修正処理と、を実行する運動エネルギー評価部11を備える。運動エネルギー評価部11は、予測誘導項の修正と修正された予測誘導項による相対運動のシミュレーションとを評価値が収束するまで繰り返し、評価値が収束したときにおける予測誘導項を含む第1の誘導指令を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
移動する目標へ飛しょう体を誘導する誘導装置であって、
前記飛しょう体の加速度に加算されるバイアス加速度を表す予測誘導項を設定して前記飛しょう体と前記目標との相対運動をシミュレーションする運動予測計算処理と、シミュレーションされた前記相対運動における前記飛しょう体の運動エネルギーの損失量を表す評価値を求めて、前記評価値が減少する態様により前記予測誘導項を修正する評価および予測誘導項修正処理と、を実行する運動エネルギー評価部を備え、
前記運動エネルギー評価部は、前記予測誘導項の修正と修正された前記予測誘導項による前記相対運動のシミュレーションとを前記評価値が収束するまで繰り返し、前記評価値が収束したときにおける前記予測誘導項を含む第1の誘導指令を算出することを特徴とする誘導装置。
続きを表示(約 530 文字)
【請求項2】
前記第1の誘導指令による前記飛しょう体の誘導を継続した場合における前記飛しょう体と前記目標との会合の成立性を評価して評価結果を出力する会合成立性評価部を備えることを特徴とする請求項1に記載の誘導装置。
【請求項3】
前記第1の誘導指令による前記飛しょう体の誘導を継続する継続時間を、前記目標の位置と前記目標の速度とに基づいて設定する継続時間設定部を備え、
前記会合成立性評価部は、設定された前記継続時間において前記第1の誘導指令による前記飛しょう体の誘導を継続した場合における会合の成立性を評価することを特徴とする請求項2に記載の誘導装置。
【請求項4】
前記目標の位置と前記目標の速度と前記飛しょう体の位置と前記飛しょう体の速度とに基づいて第2の誘導指令を生成する誘導指令生成部と、
会合が成立することを示す前記評価結果に基づいて前記第1の誘導指令を出力し、会合が不成立であることを示す前記評価結果に基づいて第2の誘導指令を出力することによって、前記第1の誘導指令の出力と前記第2の誘導指令の出力とを切り替える誘導指令切替部と、を備えることを特徴とする請求項2または3に記載の誘導装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動する目標へ飛しょう体を誘導する誘導装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ネットワークにより目標についての情報を共有する飛しょう体の運用において、飛しょう体を有効に活用するために、飛しょう体が飛しょうしている間に状況に応じて目標を変更可能であることが求められる。
【0003】
特許文献1には、目標と飛しょう体との相対運動を計算し、相対運動の結果に基づいて、飛しょう体が目標と会合する誘導完了までの飛しょう体の加速度指令値を計算する誘導装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第5577807号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
飛しょう体が飛しょうしているときにおける目標変更の許容度を高くするためには、飛しょう体の高度と速度とを保持する必要がある。ただし、目標を変更するための機動の前における目標の運動によっては、目標への会合のための誘導により飛しょう体の高度と速度とが急速に低下する場合がある。飛しょう体の高度と速度とが低下する場合、飛しょう体を目標に会合させることが困難となり、目標変更の許容度が低くなる場合がある。このように、目標へ一律に飛しょう体を追随させることによって、飛しょう体が飛しょうしているときにおける目標変更の許容度が低くなる場合がある。
【0006】
本開示は、上記に鑑みてなされたものであって、飛しょう体が飛しょうしているときにおける目標変更の許容度を高くすることができる誘導装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本開示にかかる誘導装置は、移動する目標へ飛しょう体を誘導する誘導装置である。本開示にかかる誘導装置は、飛しょう体の加速度に加算されるバイアス加速度を表す予測誘導項を設定して飛しょう体と目標との相対運動をシミュレーションする運動予測計算処理と、シミュレーションされた相対運動における飛しょう体の運動エネルギーの損失量を表す評価値を求めて、評価値が減少する態様により予測誘導項を修正する評価および予測誘導項修正処理と、を実行する運動エネルギー評価部を備える。運動エネルギー評価部は、予測誘導項の修正と修正された予測誘導項による相対運動のシミュレーションとを評価値が収束するまで繰り返し、評価値が収束したときにおける予測誘導項を含む第1の誘導指令を算出する。
【発明の効果】
【0008】
本開示にかかる誘導装置は、飛しょう体が飛しょうしているときにおける目標変更の許容度を高くすることができるという効果を奏する。
【図面の簡単な説明】
【0009】
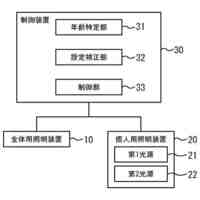
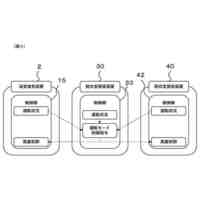
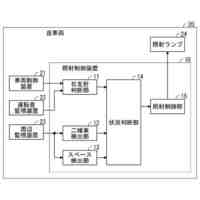
実施の形態1にかかる誘導装置の構成例を示すブロック図
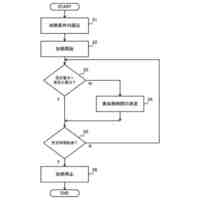
実施の形態1にかかる誘導装置の運動エネルギー評価部による処理の手順を示すフローチャート
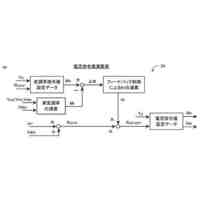
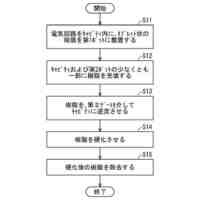
実施の形態1にかかる誘導装置の運動エネルギー評価部による処理について説明するための図
実施の形態1にかかる誘導装置によって誘導される飛しょう体の動作について説明するための図
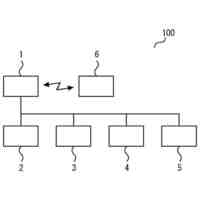
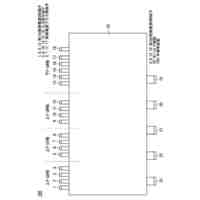
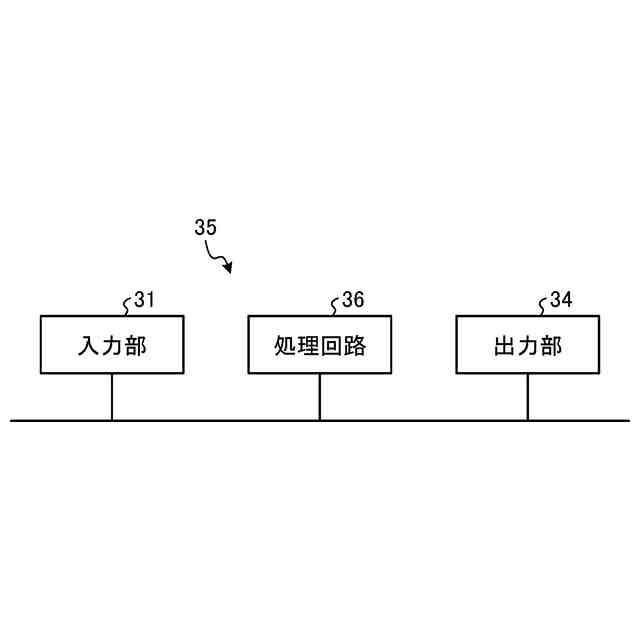
実施の形態1にかかる制御回路の構成例を示す図
実施の形態1にかかる専用のハードウェア回路の構成例を示す図
【発明を実施するための形態】
【0010】
以下に、実施の形態にかかる誘導装置を図面に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
16日前
三菱電機株式会社
給湯機
2日前
三菱電機株式会社
冷蔵庫
2日前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
電力変換装置
13日前
三菱電機株式会社
車両制御装置
15日前
三菱電機株式会社
腐食検知装置
今日
三菱電機株式会社
照明システム
8日前
三菱電機株式会社
貯湯式給湯機
8日前
三菱電機株式会社
最適演算装置
13日前
三菱電機株式会社
制御システム
6日前
三菱電機株式会社
堆肥の製造方法
13日前
三菱電機株式会社
リード矯正装置
1日前
三菱電機株式会社
浴室換気システム
8日前
三菱電機株式会社
回転電機ユニット
9日前
三菱電機株式会社
空気調和システム
1日前
三菱電機株式会社
給湯機管理システム
15日前
三菱電機株式会社
交流回転電機の制御装置
2日前
三菱電機株式会社
半導体装置および回路基板
13日前
三菱電機株式会社
光照射装置及び乗員監視装置
6日前
三菱電機株式会社
トランス装置及び半導体装置
6日前
三菱電機株式会社
制御システム及び情報処理装置
6日前
三菱電機株式会社
電気掃除機及び掃除機システム
9日前
三菱電機株式会社
画像表示装置及び画像表示方法
8日前
三菱電機株式会社
照射制御装置および照射制御方法
15日前
三菱電機株式会社
リード矯正装置及びリードの矯正方法
9日前
三菱電機株式会社
誘導加熱調理器及び加熱調理システム
13日前
三菱電機株式会社
電子機器保護具及び電子機器ユニット
6日前
三菱電機株式会社
判定システム、判定装置、及び判定方法
6日前
三菱電機株式会社
走行経路決定装置及び自動運転システム
6日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
6日前
三菱電機株式会社
設計支援装置、設計支援方法及びプログラム
今日
三菱電機株式会社
設計支援装置、設計支援方法、及びプログラム
13日前
三菱電機株式会社
設計支援装置、設計支援方法およびプログラム
15日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ