TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024078594
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022191049
出願日
2022-11-30
発明の名称
車両制御装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20240604BHJP(信号)
要約
【課題】他車の移動方向を考慮し、適切な車線変更中止判定を実施する車両制御装置を提供する。
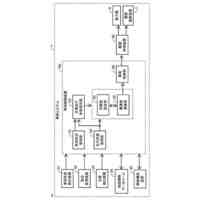
【解決手段】車両制御装置(100)は、自車(15)が車線変更を実行中に、あらかじめ定められた縦方向範囲とあらかじめ定められた幅員方向範囲とによって定まる領域内部に他車(14)を検出した場合に、車線変更を中止し元の車線に戻るか否かを判定する車線変更中止判定部(5)と、他車情報取得部(2)により取得される他車情報と、道路情報取得部(3)により取得される道路情報とに基づき、他車(14)の移動方向を判定する移動方向判定部(4)と、を備え、車線変更中止判定部(5)は、移動方向判定部(4)が判定した他車の移動方向に応じて縦方向範囲と幅員方向範囲の少なくとも一方を変化させるように構成されている。
【選択図】図6
特許請求の範囲
【請求項1】
自車の走行状態を取得する自車状態取得部と、
前記自車が走行している道路を走行する他車の位置、速度を含む他車情報を取得する他車情報取得部と、
前記自車が走行している車線変更元車線に隣接する隣接車線の車線中心に関する情報を含む道路情報を取得する道路情報取得部と、
前記他車情報取得部により取得される前記他車情報に基づき、前記隣接車線への前記自車の車線変更を実行する車両制御部と、
を備えた車両制御装置であって、
前記車線変更の実行中に、あらかじめ定められた縦方向範囲とあらかじめ定められた幅員方向範囲とによって定まる領域内部に他車を検出した場合に、前記車線変更を中止し元の車線に戻るか否かを判定する車線変更中止判定部と、
前記他車情報取得部により取得される前記他車情報と、前記道路情報取得部により取得される前記道路情報と、に基づき、前記他車の移動方向を判定する移動方向判定部と、
を備え、
前記車線変更中止判定部は、前記移動方向判定部が判定した前記他車の移動方向に応じて、前記縦方向範囲と前記幅員方向範囲の少なくとも一方を変化させるように構成されている、
ことを特徴とする車両制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記車線変更中止判定部は、前記移動方向判定部が判定した前記他車の移動方向と、前記隣接車線の車線中心を基準とした前記他車の幅員方向偏差に応じて、前記縦方向範囲を変化させるように構成されている、
ことを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記車線変更中止判定部は、前記移動方向判定部が判定した前記他車の移動方向が前記隣接車線の外側であり、かつ、前記隣接車線の車線中心を基準とした前記他車の幅員方向偏差があらかじめ定められた閾値よりも大きい場合は、前記縦方向範囲をあらかじめ定められた範囲よりも小さくするように構成されている、
ことを特徴とする請求項2に記載の車両制御装置。
【請求項4】
前記車線変更中止判定部は、前記移動方向判定部が判定した前記他車の移動方向が前記隣接車線の内側であり、かつ、前記隣接車線の車線中心を基準とした前記他車の幅員方向偏差があらかじめ定められた閾値よりも大きい場合は、前記縦方向範囲をあらかじめ定められた範囲よりも大きくするように構成されている、
ことを特徴とする請求項2に記載の車両制御装置。
【請求項5】
前記車線変更中止判定部は、前記移動方向判定部が判定した他車の移動方向と、前記車線変更元車線と前記隣接車線との間の区画線を基準とした前記他車の幅員方向偏差に応じて、前記縦方向範囲を変化させるように構成されている、
ことを特徴とする請求項1に記載の車両制御装置。
【請求項6】
前記車線変更中止判定部は、前記移動方向判定部が判定した前記他車の移動方向が前記車線変更元車線に向かう方向であり、かつ、前記車線変更元車線と前記隣接車線との間の区画線を基準とした前記他車の幅員方向偏差があらかじめ定められた閾値よりも小さい場合は、前記縦方向範囲をあらかじめ定められた範囲よりも小さくするように構成されている、
ことを特徴とする請求項5に記載の車両制御装置。
【請求項7】
前記車線変更中止判定部は、前記移動方向判定部が判定した前記他車の移動方向が前記隣接車線に向かう方向であり、かつ、前記車線変更元車線と前記隣接車線との間の区画線を基準とした前記他車の幅員方向偏差があらかじめ定められた閾値よりも小さい場合は、前記縦方向範囲をあらかじめ定められた範囲よりも大きくするように構成されている、
ことを特徴とする請求項5に記載の車両制御装置。
【請求項8】
前記車線変更中止判定部は、前記移動方向判定部により前記他車が直進していると判定された場合に、前記自車に対する前記他車の幅員方向距離に応じて、前記縦方向範囲を変化させるように構成されている、
ことを特徴とする請求項1に記載の車両制御装置。
【請求項9】
前記車線変更中止判定部は、前記移動方向判定部により前記他車が直進していると判定されたとき、前記自車に対する前記他車の幅員方向距離があらかじめ定められた閾値よりも小さい場合に前記縦方向範囲をあらかじめ定められた範囲よりも小さくするように構成されている、
ことを特徴とする請求項8に記載の車両制御装置。
【請求項10】
前記車線変更中止判定部は、前記自車と前記他車との間の幅員方向距離があらかじめ定められた閾値よりも小さく、かつ、前記自車の移動方向と前記移動方向判定部により判定された前記他車の移動方向とが異なる場合に、前記縦方向範囲をあらかじめ定められた範囲よりも小さくするように構成されている、
ことを特徴とする請求項1に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、車両制御装置に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
車両の運転を支援する運転支援技術において、運転者の負担を軽減するために、周辺車両を考慮して車線変更の開始および中止を適切なタイミングで実行する車両制御装置が提案されている。たとえば、特許文献1には、自動車線変更の実施中にあらかじめ定められた領域に侵入する他車が認識された場合に、自車の位置に基づいて車線変更継続可否を判定し、車線変更の継続又は中止を行うようにした技術が開示されている。
【0003】
特許文献1に開示された従来の技術によれば、隣接車線への車線変更がほぼ完了した状態で車線変更を中止して元の車線に戻る場合のような、不自然な車両挙動を回避し、交通流、乗員、への影響を低減することができるとされる。
【先行技術文献】
【特許文献】
【0004】
特許第6895111号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、自車が隣接車線の他車と健全な距離が保たれている状態で、自車が現在の走行車線から隣接車線に車線変更を開始した後に、他車の加減速によって自車が他車と接近した場合は、車線変更を中止して元の車線に戻ることで他車との接近を回避する必要がある。ところが、接近してきた他車が車線変更により隣接車線を離脱しようとしている場合は、他車と接近している状況でも自車が隣接車線への車線変更を継続するのが適切であり、逆に他車が隣接車線に向かって車線変更しようとしている場合は、他車と接近していないが車線変更を中止するのが適切である。このように、他車の挙動に応じて、臨機応変に自車の走行を制御する必要がある。
【0006】
特許文献1に開示された従来の技術によれば、道路における車線の区画線に対する自車位置によって車線変更の中止を抑制しており、他車の移動方向が考慮されていないため、他車との接近の可能性が低い状況で自車の車線変更を中止した場合、自車の乗員に違和感を与える懸念があるという課題があった。
【0007】
本願は、上記のような課題を解決するための技術を開示するものであり、他車の移動方向を考慮して、自車の適切な走行を実現する車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願に開示される車両制御装置は、
自車の走行状態を取得する自車状態取得部と、
前記自車が走行している道路を走行する他車の位置、速度を含む他車情報を取得する他車情報取得部と、
前記自車が走行している車線変更元車線に隣接する隣接車線の車線中心に関する情報を含む道路情報を取得する道路情報取得部と、
前記他車情報取得部により取得される前記他車情報に基づき、前記隣接車線への前記自車の車線変更を実行する車両制御部と、
を備えた車両制御装置であって、
前記車線変更の実行中に、あらかじめ定められた縦方向範囲とあらかじめ定められた幅員方向範囲とによって定まる領域内部に他車を検出した場合に、前記車線変更を中止し元の車線に戻るか否かを判定する車線変更中止判定部と、
前記他車情報取得部により取得される前記他車情報と、前記道路情報取得部により取得される前記道路情報と、に基づき、前記他車の移動方向を判定する移動方向判定部と、
を備え、
前記車線変更中止判定部は、前記移動方向判定部が判定した前記他車の移動方向に応じて、前記縦方向範囲と前記幅員方向範囲の少なくとも一方を変化させるように構成されている、
ことを特徴とするものである。
【発明の効果】
【0009】
本願に開示される車両制御装置によれば、他車の移動方向を考慮して自車の適切な走行を実現する車両制御装置が得られる。
【図面の簡単な説明】
【0010】
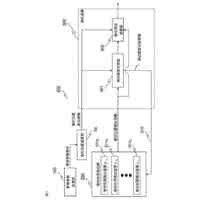
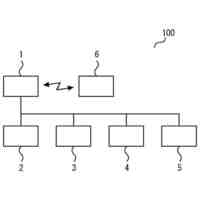
実施の形態1による車両制御装置の構成を示すブロック図である。
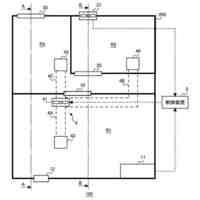
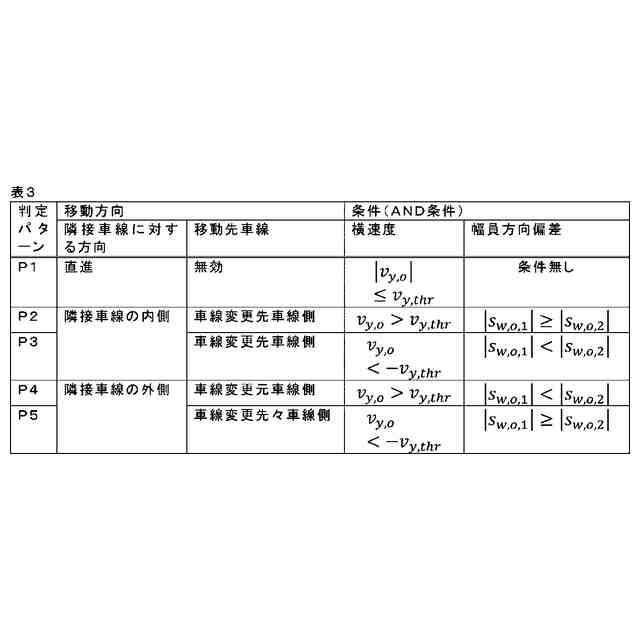
実施の形態1による車両制御装置における、他車の移動方向の判定の仕方を説明する説明図である。
実施の形態1による車両制御装置における、他車の移動方向の判定を図2とは異なる仕方で行なう場合の説明図である。
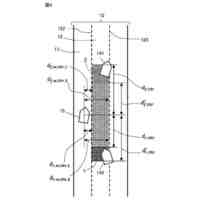
実施の形態1による車両制御装置における、車線中心に対して垂直な方向に変換した他車の幅員方向速度を示す説明図である。
実施の形態1による車両制御装置における、横方向速度閾値と車線の幅員との関係を示す説明図である。
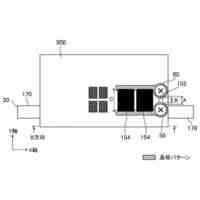
実施の形態1による車両制御装置における、車線変更中止判定領域を示す説明図である。
実施の形態1による車両制御装置における、他車と同じ方向に回避する自車の動作を抑制する場合を示す説明図である。
実施の形態1による車両制御装置における、自車の車線変更中止を促進する場合を示す説明図である。
実施の形態1による車両制御装置における、自車の車線変更中止を促進する別の場合を示す説明図である。
実施の形態1による車両制御装置における、車線変更中止判定領域の別の例を示す説明図である。
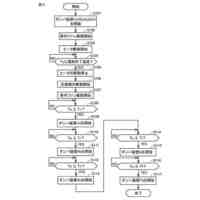
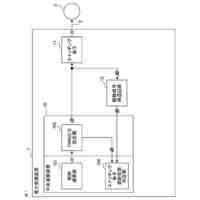
実施の形態1による車両制御装置の処理を示すフローチャートである。
実施の形態1による車両制御装置を構成するECUのハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
16日前
三菱電機株式会社
冷蔵庫
20日前
三菱電機株式会社
冷蔵庫
20日前
三菱電機株式会社
給湯機
2日前
三菱電機株式会社
冷蔵庫
2日前
三菱電機株式会社
冷却装置
1か月前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
照明装置
23日前
三菱電機株式会社
照明器具
29日前
三菱電機株式会社
照明装置
16日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
静止誘導器
1か月前
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
位置推定装置
1か月前
三菱電機株式会社
最適演算装置
13日前
三菱電機株式会社
貯湯式給湯機
8日前
三菱電機株式会社
給湯システム
1か月前
三菱電機株式会社
電力変換装置
13日前
三菱電機株式会社
空調システム
28日前
三菱電機株式会社
照明システム
8日前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
電力変換装置
27日前
三菱電機株式会社
車両制御装置
15日前
三菱電機株式会社
空調システム
28日前
三菱電機株式会社
空調システム
27日前
三菱電機株式会社
空調システム
27日前
三菱電機株式会社
制御システム
6日前
三菱電機株式会社
電力変換装置
19日前
三菱電機株式会社
腐食検知装置
今日
三菱電機株式会社
無線センサ装置
1か月前
三菱電機株式会社
リード矯正装置
1日前
三菱電機株式会社
半導体製造装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ