TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025178942
公報種別
公開特許公報(A)
公開日
2025-12-09
出願番号
2024085829
出願日
2024-05-27
発明の名称
インパクト工具、及びインパクト工具の制御方法
出願人
パナソニック株式会社
代理人
弁理士法人北斗特許事務所
主分類
B25B
21/02 20060101AFI20251202BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】的確な締付動作の実現を図る。
【解決手段】インパクト工具1は、モータ11と打撃回転機構12と検知部13と制御部15と計測部14とを備える。モータ11は、正転及び逆転が可能である。打撃回転機構12は、モータ11から回転力を受けて正転及び逆転を繰り返しながら回転慣性力による打撃動作を行う。検知部13は、モータ11又は打撃回転機構12の回転量及び回転量の変化量を検知する。制御部15は、打撃回転機構12の打撃動作による打撃回転力、及びモータ11の正転での回転力、の少なくとも1つで対象物を締め付ける締付動作が行われるように、モータ11を制御する。計測部14は、締付動作の締付時間を計測する。制御部15は、モータ11が正転しているとき、回転量と第1閾値との関係、変化量と第2閾値との関係及び締付時間と第3閾値との関係の少なくとも1つに関する逆転条件が満たされた場合に、モータ11を逆転させる。
【選択図】図2
特許請求の範囲
【請求項1】
正転及び逆転が可能なモータと、
前記モータから回転力を受けて正転及び逆転を繰り返しながら回転慣性力による打撃動作を行う打撃回転機構と、
前記モータ又は前記打撃回転機構の回転量及び前記回転量の変化量を検知する検知部と、
前記打撃回転機構の前記打撃動作による打撃回転力、及び前記モータの正転での前記回転力、の少なくとも1つで対象物を締め付ける締付動作が行われるように、前記モータを制御する制御部と、
前記締付動作の締付時間を計測する計測部と、を備え、
前記制御部は、前記モータが正転しているとき、前記回転量と第1閾値との関係、前記変化量と第2閾値との関係及び前記締付時間と第3閾値との関係の少なくとも1つに関する逆転条件が満たされた場合に、前記モータを逆転させる、
インパクト工具。
続きを表示(約 2,000 文字)
【請求項2】
前記制御部は、前記回転量、前記変化量及び前記締付時間、の少なくとも1つに基づいて、前記締付動作が行われるように前記モータを制御する、
請求項1に記載のインパクト工具。
【請求項3】
前記締付動作は、前記打撃回転機構の前記打撃動作による前記打撃回転力、及び前記打撃動作の後の前記モータの正転での前記回転力、で前記対象物を締め付ける動作を含む、
請求項2に記載のインパクト工具。
【請求項4】
前記締付時間は、前記締付動作の開始時点からの経過時間であり、
前記変化量は、前記開始時点からの正転での前記回転量の増加量であり、
前記逆転条件は、
前記回転量と第1閾値との関係に関する第1逆転条件、
前記増加量と第2閾値との関係に関する第2逆転条件、及び
前記締付時間と第3閾値との関係に関する第3逆転条件のうち1つ以上の条件を含み、
前記制御部は、前記モータが正転しているとき、前記1つ以上の条件のうち少なくとも1つの条件が満たされた場合に前記モータを逆転させる、
請求項1~3のいずれか一項に記載のインパクト工具。
【請求項5】
前記第1逆転条件は、前記検知部が検知した前記回転量が前記第1閾値以上になったという条件であり、
前記第2逆転条件は、前記検知部が検知した前記増加量が前記第2閾値以上になったという条件であり、
前記第3逆転条件は、前記計測部が計測した前記締付時間が前記第3閾値以上になったという条件である、
請求項4に記載のインパクト工具。
【請求項6】
前記計測部は、
前記締付動作に応じて変化する物理量であって、前記回転量よりも速く変化する物理量を検知するセンサで実現され、
前記打撃回転力に応じた前記センサの出力信号の変化を基に、前記開始時点を特定し、
前記検知部は、前記計測部が特定した前記開始時点からの前記増加量を検知する、
請求項4に記載のインパクト工具。
【請求項7】
前記回転力及び前記打撃回転力を出力する出力軸を更に備え、
前記物理量は、前記出力軸の歪であり、
前記センサは、前記出力軸の歪を検知する歪センサを含み、
前記計測部は、前記打撃回転力に応じて前記歪センサの前記出力信号が立ち上がった時点を前記開始時点として特定する、
請求項6に記載のインパクト工具。
【請求項8】
前記検知部は、前記開始時点の後、前記回転量が増加している増加状態から前記回転量が変化していない無変化状態に変化する変化時点を更に特定し、
前記計測部は、前記検知部が特定した前記変化時点からの前記無変化状態の継続時間である無変化時間を更に計測し、
前記逆転条件は、前記計測部が計測した前記無変化時間が前記第3閾値よりも小さい第4閾値以上になったという第4逆転条件を更に含み、
前記制御部は、前記モータが正転しているとき、前記第1逆転条件、前記第2逆転条件、前記第3逆転条件及び前記第4逆転条件の少なくとも1つが満たされた場合に、前記モータを逆転させる、
請求項4に記載のインパクト工具。
【請求項9】
前記制御部は、前記モータを逆転させた後、前記回転量と第1所定値との関係、前記モータを逆転させてからの前記回転量の減少量と第2所定値との関係、及び前記モータを逆転させてからの経過時間である逆転時間と第3所定値との関係、の少なくとも1つに関する正転条件が満たされるまで、前記モータの逆転状態を継続させる、
請求項1に記載のインパクト工具。
【請求項10】
正転及び逆転が可能なモータと、前記モータから回転力を受けて正転及び逆転を繰り返しながら回転慣性力による打撃動作を行う打撃回転機構と、を備えるインパクト工具の制御方法であって、
前記モータ又は前記打撃回転機構の回転量及び前記回転量の変化量を検知する検知ステップと、
前記打撃回転機構の前記打撃動作による打撃回転力、及び前記モータの前記回転力、の少なくとも1つで対象物を締め付ける締付動作が行われるように、前記モータを制御する制御ステップと、
前記締付動作の締付時間を計測する計測ステップと、を含み、
前記制御ステップでは、前記モータが正転しているとき、前記回転量と第1閾値との関係、前記変化量と第2閾値との関係及び前記締付時間と第3閾値との関係の少なくとも1つに関する逆転条件が満たされた場合に、前記モータを逆転させる、
インパクト工具の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、インパクト工具、及びインパクト工具の制御方法に関し、より詳細には、打撃動作を行うインパクト工具、及び打撃動作を行うインパクト工具の制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、ハンマと打撃機構と制御部と回転位置検出手段とを有する電動工具が記載されている。ハンマは、モータによって駆動される。打撃機構は、ハンマに対して回転可能であって、ハンマによって打撃されるアンビルを有する。出力軸は、アンビルに接続される。制御部は、モータの回転を制御する。回転位置検出手段は、モータの回転位置を検出する。制御部は、出力軸が、第1の角度の正回転と、第1の角度より小さい第2の角度の逆回転と、を繰り返すようにモータの回転を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2012-157925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の電動工具では、打撃機構でのハンマによるアンビルへの打撃を利用することで、大トルクでの締付動作が可能になる一方、小トルクでの締付動作を的確に行うことが容易でなかった。
【0005】
詳しくは、小トルクで締付動作を行う際に、例えば、正転時の第1の角度に対し、逆転時の第2の角度をより小さくして、単位時間当たりの打撃回数を増やすことが考えられる。しかし、特許文献1の電動工具のように、出力軸の回転角を基にモータの制御を行う場合、打撃に対する回転角の変化は、アンビルが有する慣性によって遅延するので、単位時間当たりの打撃回数が増えるほど遅延が増大し、的確な締付動作を行うことが容易でなくなる可能性がある。
【0006】
本開示の目的は、的確な締付動作の実現を図ることができるインパクト工具を提供することである。
【課題を解決するための手段】
【0007】
本開示の一態様に係るインパクト工具は、モータと打撃回転機構と検知部と制御部と計測部とを備える。前記モータは、正転及び逆転が可能である。前記打撃回転機構は、前記モータから回転力を受けて正転及び逆転を繰り返しながら回転慣性力による打撃動作を行う。前記検知部は、前記モータ又は前記打撃回転機構の回転量及び前記回転量の変化量を検知する。前記制御部は、前記打撃回転機構の前記打撃動作による打撃回転力、及び前記モータの正転での前記回転力、の少なくとも1つで対象物を締め付ける締付動作が行われるように、前記モータを制御する。前記計測部は、前記締付動作の締付時間を計測する。前記制御部は、前記モータが正転しているとき、前記回転量と第1閾値との関係、前記変化量と第2閾値との関係及び前記締付時間と第3閾値との関係の少なくとも1つに関する逆転条件が満たされた場合に、前記モータを逆転させる。
【0008】
本開示の一態様に係るインパクト工具の制御方法は、モータと打撃回転機構とを備えるインパクト工具の制御方法である。前記モータは、正転及び逆転が可能である。前記打撃回転機構は、前記モータから回転力を受けて正転及び逆転を繰り返しながら回転慣性力による打撃動作を行う。前記インパクト工具の制御方法は、検知ステップと制御ステップと計測ステップとを含む。前記検知ステップでは、前記モータ又は前記打撃回転機構の回転量及び前記回転量の変化量が検知される。前記制御ステップでは、前記打撃回転機構の前記打撃動作による打撃回転力、及び前記モータの正転での前記回転力、の少なくとも1つで対象物を締め付ける締付動作が行われるように、前記モータが制御される。前記計測ステップでは、前記締付動作の締付時間が計測される。前記制御ステップでは、前記モータが正転しているとき、前記回転量と第1閾値との関係、前記変化量と第2閾値との関係及び前記締付時間と第3閾値との関係の少なくとも1つに関する逆転条件が満たされた場合に、前記モータが逆転される。
【発明の効果】
【0009】
本開示のインパクト工具、及びインパクト工具の制御方法は、的確な締付動作の実現を図ることができるという効果がある。
【図面の簡単な説明】
【0010】
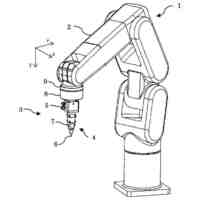
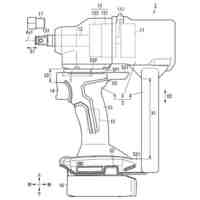
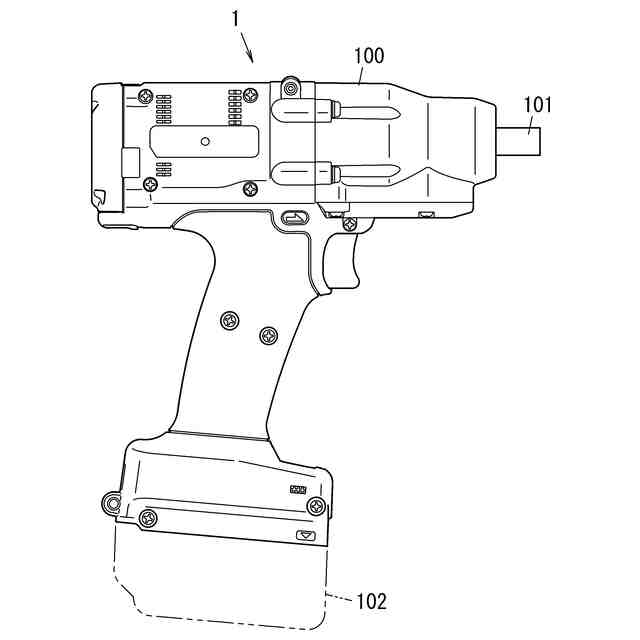
図1は、本開示の実施形態に係るインパクト工具の外観図である。
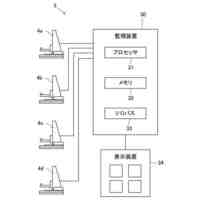
図2は、同上のインパクト工具のブロック図である。
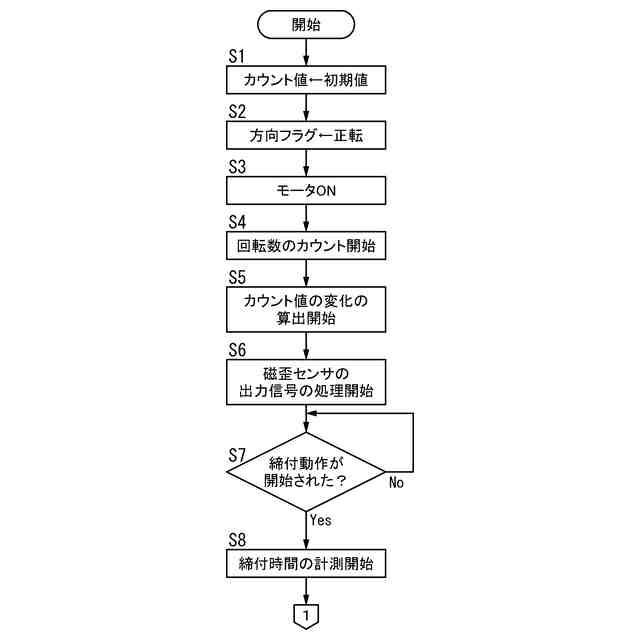
図3は、同上のインパクト工具の制御部の動作の一部を説明するフローチャートである。
図4は、同上のインパクト工具の動作の他の一部を説明するフローチャートである。
図5は、同上のインパクト工具における計測部(磁歪センサ)の出力波形を示すグラフである。
図6は、同上のインパクト工具における検知部(エンコーダ)の出力波形と、制御部からモータへの電流指令値の波形と、モータの回転速度の波形と、を比較可能に示すグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
トヨタ自動車株式会社
学習装置
22日前
CKD株式会社
把持装置
7日前
ダイセイ株式会社
ロボット自動刻印装置
7日前
川崎重工業株式会社
ハンド
2か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
2か月前
瓜生製作株式会社
電動締付工具
15日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
2か月前
株式会社マキタ
集塵アタッチメント
14日前
株式会社不二越
垂直多関節ロボット
22日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社やまびこ
電動作業機
1日前
新電元工業株式会社
インピーダンス制御装置
1日前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
住友重機械工業株式会社
ロボット教示装置
2日前
パナソニック株式会社
工具
1日前
株式会社マキタ
作業機
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
電動工具
22日前
NTN株式会社
把持装置
7日前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
東レエンジニアリング株式会社
ツール動作機構
2か月前
株式会社マキタ
電動作業機
2日前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
1か月前
川崎重工業株式会社
監視システム
2か月前
ファナック株式会社
経路データセット生成
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ