TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025178469
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2025166150,2020216192
出願日
2025-10-02,2020-12-25
発明の名称
手術支援ロボットシステムおよび手術支援ロボットの制御方法
出願人
川崎重工業株式会社
,
株式会社メディカロイド
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20251128BHJP(医学または獣医学;衛生学)
要約
【課題】手術支援ロボットを位置合わせする際において、操作者の負担を低減することが可能な手術支援ロボットを提供する。
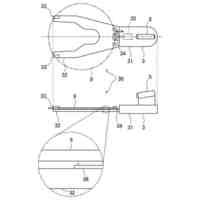
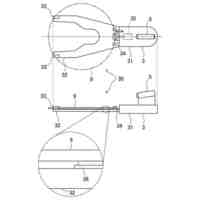
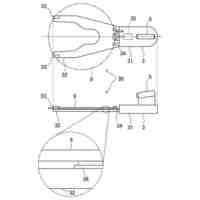
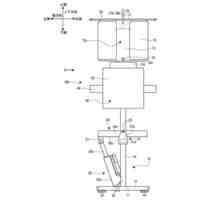
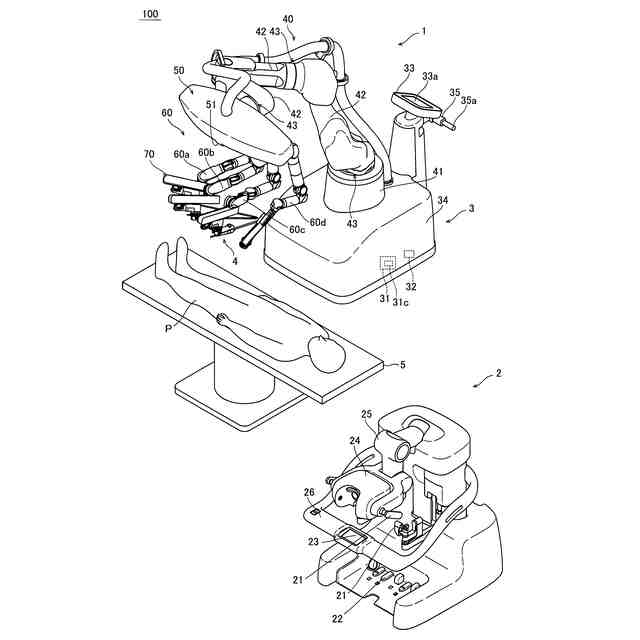
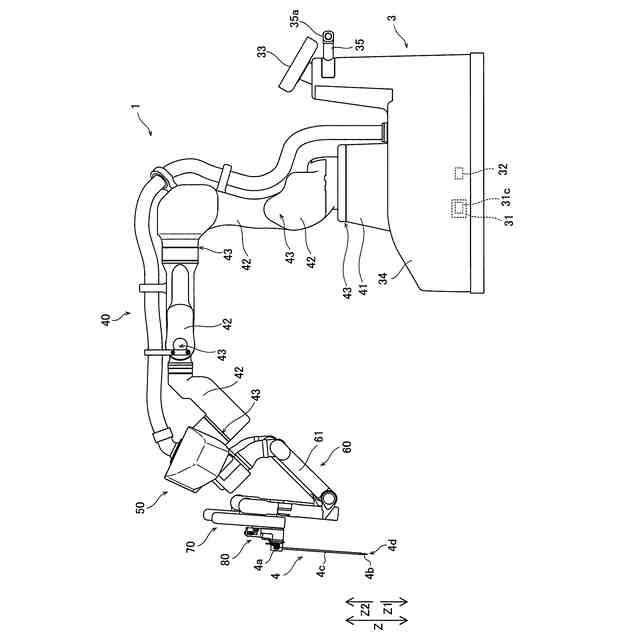
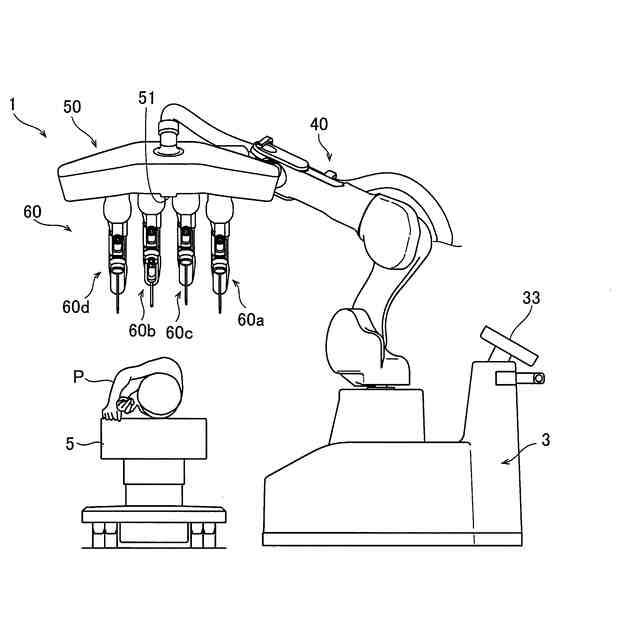
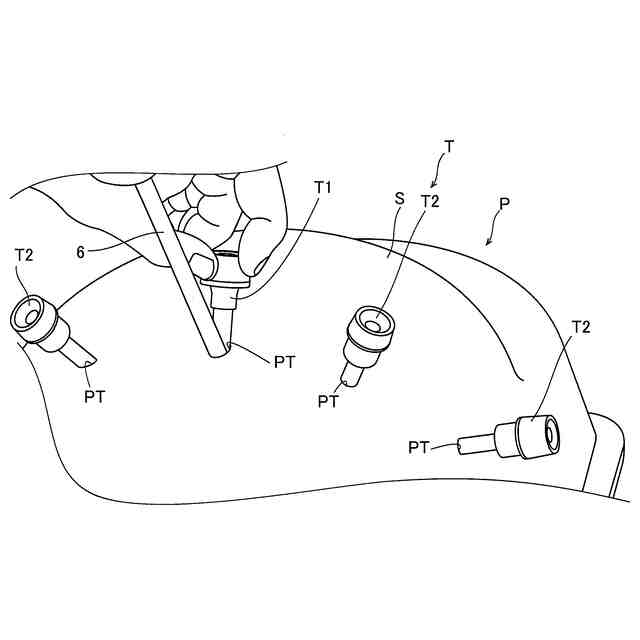
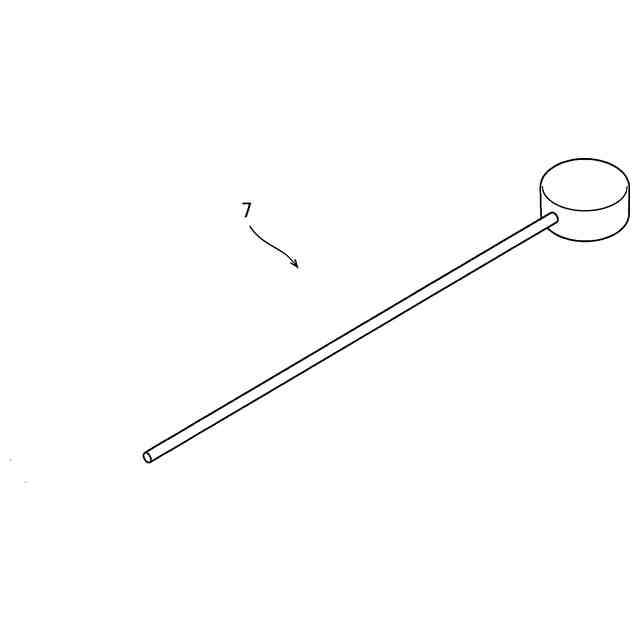
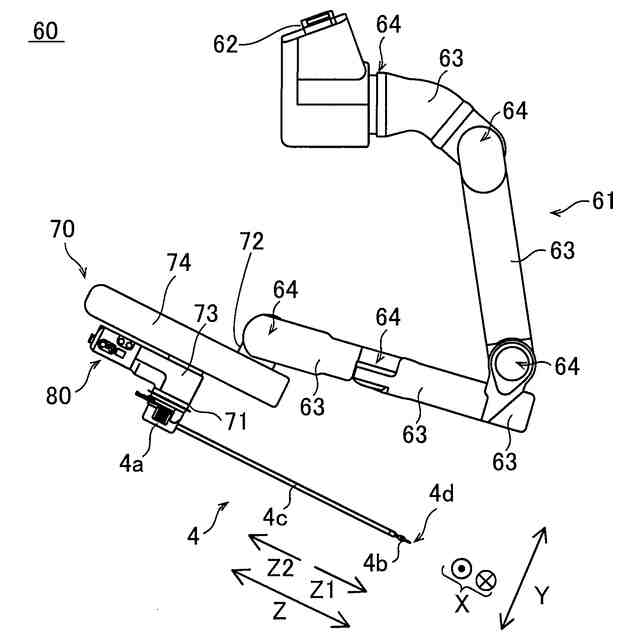
【解決手段】この医療用マニピュレータ1では、制御部31は、撮影部51により撮影された画像に基づいて、手術台5に載置された患者Pの体表面Sに設けられる医療器具4を挿入するためのポートPTまたはトロカールTに対応する位置に対してアーム60を位置合わせするように、サーボモータM5によって医療用台車3を移動させる。
【選択図】図16
特許請求の範囲
【請求項1】
手術支援ロボットシステムであって、
複数の医療器具がそれぞれ取り付けられる複数のアームを支持するアームベースおよび前記アームベースを移動させるように複数の関節を含むロボットであるポジショナを備えるロボット本体部と、
前記ロボット本体部を支持し、移動可能な医療用台車と、
前記医療用台車を移動させるための医療用台車駆動部と、
前記ロボット本体部に設けられるとともに、手術台に載置された患者を撮影するための撮影部と、
1または複数の制御部と、を備え、
前記患者には、前記複数の医療器具をそれぞれ挿入するための複数のトロカールが体表面に設置されており、
前記制御部は、
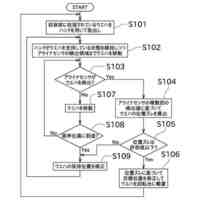
前記医療用台車の移動経路を計画し、計画された前記移動経路に基づいて、前記医療用台車が第1の位置から前記第1の位置よりも前記手術台に近い第2の位置に移動するように前記医療用台車駆動部を制御し、
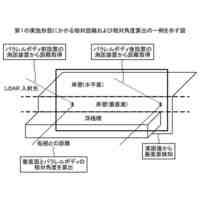
前記医療用台車が前記第2の位置に配置された状態で、前記撮影部により撮影された画像に基づいて、前記複数のトロカールの配列に対して前記複数のアームの配列を位置合わせするように、前記ポジショナにより前記アームベースを移動させる、手術支援ロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、前記撮影部により撮影された画像および前記移動経路に基づいて、前記医療用台車を移動させる、請求項1に記載の手術支援ロボットシステム。
【請求項3】
前記手術台と前記医療用台車との間の距離を測定する距離測定部を備え、
前記制御部は、前記距離測定部により測定された距離および前記移動経路に基づいて、前記医療用台車を移動させる、請求項1に記載の手術支援ロボットシステム。
【請求項4】
前記制御部は、手術室内を撮影する第2撮影部により撮影された画像および前記移動経路に基づいて、前記医療用台車を移動させる、請求項1に記載の手術支援ロボットシステム。
【請求項5】
前記医療用台車に設けられ、前記医療用台車の移動の障害となる障害物を検知する障害物検知センサを備える、請求項1から請求項4までの何れか1項に記載の手術支援ロボットシステム。
【請求項6】
前記制御部は、前記撮影部により撮影された画像に基づいて、前記複数のトロカールの配列に前記複数のアームの配列が一致するように前記ポジショナにより前記アームベースを移動させる、請求項1から請求項5までの何れか1項に記載の手術支援ロボットシステム。
【請求項7】
前記複数の医療器具のうちの一つは、内視鏡であり、
前記制御部は、前記撮影部により撮影された画像に基づいて、前記内視鏡の挿入されるトロカールの画像を基準に前記複数のトロカールの配列に対して前記複数のアームの配列位置合わせするように、前記ポジショナにより前記アームベースを移動させる、請求項1から請求項6までの何れか1項に記載の手術支援ロボットシステム。
【請求項8】
前記撮影部は、前記アームベースに設けられている、請求項1から請求項7までの何れか1項に記載の手術支援ロボットシステム。
【請求項9】
前記撮影部は、3次元カメラを含む、請求項1から請求項8までの何れか1項に記載の手術支援ロボットシステム。
【請求項10】
前記複数のトロカールは、それぞれ複数のポートを介して前記体表面に設置されており、
前記制御部は、前記撮影部により撮影された画像に基づいて前記複数のポートの各座標を取得し、取得した前記複数のポートの各座標に基づいて、前記複数のポートの配列に対して前記複数のアームの配列を位置合わせする、請求項1から請求項9の何れか1項に記載の手術支援ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、手術支援ロボットシステムおよび手術支援ロボットの制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、患者に対して手術支援ロボットが位置合わせされる手術支援ロボットが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、内視鏡などの医療器具が各々取り付けられる複数のアームを備える遠隔操作アセンブリ(手術支援ロボット)が開示されている。遠隔操作アセンブリは、ベースと、ベースに取り付けられる伸縮式支持コラムとを備えている。伸縮式支持コラムは、鉛直方向に沿うように設けられている。また、伸縮式支持コラムから水平方向に延びるように、伸縮式ブームが設けられている。そして、伸縮式ブームの先端に設けられた配向プラットホームに複数の支持ビームを介して複数のアームが取り付けられている。
【0004】
上記特許文献1の遠隔操作アセンブリでは、遠隔操作アセンブリから手術台に載置された患者に対して基準レーザ線を照射するように構成されている。そして、遠隔操作アセンブリを移動させる看護師、技師などの操作者は、タッチパッドに示される誘導セットアップスクリーンプロンプトと音声プロンプトとに従って、患者に直接照射された基準レーザ線に沿って、複数のアームが配置されるように遠隔操作アセンブリの全体を移動する。これにより、患者に対して遠隔操作アセンブリを位置合わせしようとしている。
【先行技術文献】
【特許文献】
【0005】
特表2017-515522号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載された遠隔操作アセンブリの場合、操作者が患者に対して遠隔操作アセンブリを位置合わせする必要があり、操作者の負担が増大するという問題点がある。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、手術支援ロボットを位置合わせする際において、操作者の負担を低減することが可能な手術支援ロボットシステムおよび手術支援ロボットの制御方法を提供することである。
【課題を解決するための手段】
【0008】
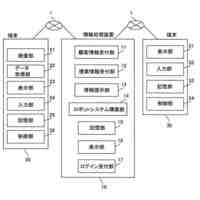
上記目的を達成するために、この発明の第1の局面による手術支援ロボットシステムは、手術支援ロボットシステムであって、複数の医療器具がそれぞれ取り付けられる複数のアームを支持するアームベースおよびアームベースを移動させるように複数の関節を含むロボットであるポジショナを備えるロボット本体部と、ロボット本体部を支持し、移動可能な医療用台車と、医療用台車を移動させるための医療用台車駆動部と、ロボット本体部に設けられるとともに、手術台に載置された患者を撮影するための撮影部と、1または複数の制御部と、を備え、患者には、複数の医療器具をそれぞれ挿入するための複数のトロカールが体表面に設置されており、制御部は、医療用台車の移動経路を計画し、計画された移動経路に基づいて、医療用台車が第1の位置から第1の位置よりも手術台に近い第2の位置に移動するように医療用台車駆動部を制御し、医療用台車が第2の位置に配置された状態で、撮影部により撮影された画像に基づいて、複数のトロカールの配列に対して複数のアームの配列を位置合わせするように、ポジショナによりアームベースを移動させる。
【0009】
この発明の第1の局面による手術支援ロボットシステムは、上記のように、撮影部により撮影された画像に基づいて、手術台に載置された患者の体表面に設けられる医療器具を挿入するためのポートまたはトロカールに対応する位置に対してアームを位置合わせするように、医療用台車駆動部によって医療用台車を移動させる制御とロボット本体部によりアームを移動させる制御とのうちの少なくとも一方を行う制御部を備える。これにより、医療用台車駆動部によって医療用台車を移動させる制御とロボット本体部によりアームを移動させる制御とのうちの少なくとも一方によって、ポートまたはトロカールに対応する位置に対してアームが自動的に位置合わせされるので、手術支援ロボットを位置合わせする際において、操作者の負担を低減することができる。
【0010】
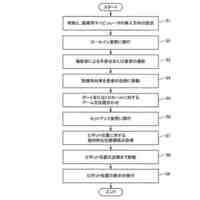
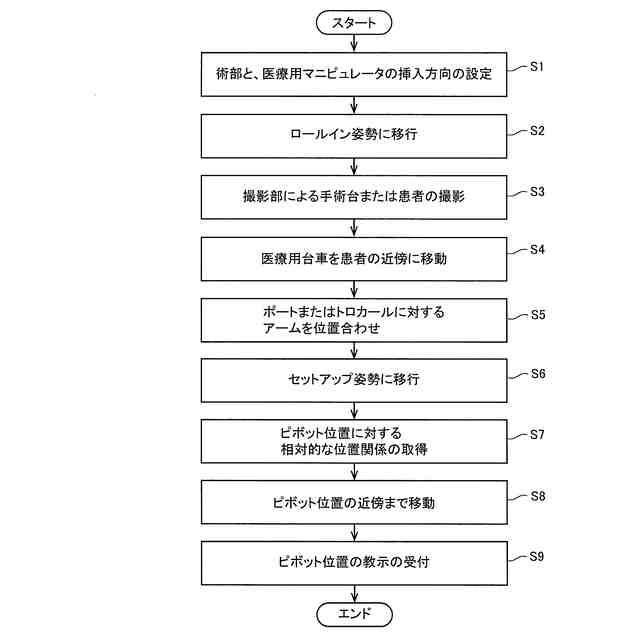
この発明の第2の局面による手術支援ロボットの制御方法は、複数の医療器具がそれぞれ取り付けられる複数のアームを支持するアームベースおよびアームベースを移動させるように複数の関節を含むロボットであるポジショナを備えるロボット本体部と、ロボット本体部を支持し、移動可能な医療用台車と、医療用台車を移動させるための医療用台車駆動部とを備える、手術支援ロボットの制御方法であって、医療用台車の移動経路を計画するステップと、複数の医療器具をそれぞれ挿入するための複数のトロカールが体表面に設置されており且つ手術台に載置された患者をロボット本体部に設けられる撮影部により撮影するステップと、計画された移動経路に基づいて、医療用台車が第1の位置から第1の位置よりも手術台に近い第2の位置に移動するように医療用台車駆動部を制御するステップと、撮影部により撮影された画像に基づいて、内視鏡用のトロカールがアームベースに対して所定の位置に配置されるように、医療用台車駆動部によって医療用台車を患者から離間した第1の位置から移動させて手術を実施する第2の位置に配置するステップと、医療用台車が第2の位置に配置された状態で、撮影部により撮影された画像に基づいて、複数のトロカールの配列に対して複数のアームの配列を位置合わせするように、ポジショナによりアームベースを移動させるステップと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
寝台
2日前
川崎重工業株式会社
圧縮機
今日
川崎重工業株式会社
圧縮機
今日
川崎重工業株式会社
ロボットシステム
今日
川崎重工業株式会社
基板搬送システム
今日
川崎重工業株式会社
寝台及び寝台セット
今日
川崎重工業株式会社
カーボンリサイクルシステム
1日前
川崎重工業株式会社
可変静翼の制御装置および制御方法
今日
川崎重工業株式会社
船舶用の寝台及び船舶用の寝台セット
今日
川崎重工業株式会社
情報処理装置および情報処理装置の制御方法
7日前
川崎重工業株式会社
ロボットシステム
今日
川崎重工業株式会社
ヘリウムリーク試験用治具およびそれを用いたヘリウムリーク試験方法
今日
川崎重工業株式会社
搬送システム及び判定方法
2日前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
2日前
川崎重工業株式会社
基板搬送システム及び基板搬送方法
今日
川崎重工業株式会社
基板搬送システム及び基板搬送方法
今日
川崎重工業株式会社
手術支援ロボットシステムおよび手術支援ロボットの制御方法
今日
個人
貼付剤
1か月前
個人
簡易担架
21日前
個人
短下肢装具
4か月前
個人
腋臭防止剤
21日前
個人
足踏み器具
28日前
個人
白内障治療法
8か月前
個人
洗井間専家。
8か月前
個人
嚥下鍛錬装置
5か月前
個人
前腕誘導装置
4か月前
個人
排尿補助器具
1か月前
個人
矯正椅子
6か月前
個人
胸骨圧迫補助具
3か月前
個人
テスト肺
2日前
個人
水分吸収性物品
今日
個人
歯の修復用材料
5か月前
個人
バッグ式オムツ
5か月前
個人
汚れ防止シート
2か月前
個人
ウォート指圧法
1か月前
個人
アイマスク装置
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ