TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177539
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084469
出願日
2024-05-24
発明の名称
位置同定システム及びその方法
出願人
学校法人立命館
,
国立大学法人兵庫教育大学
代理人
個人
,
個人
主分類
G06T
7/70 20170101AFI20251128BHJP(計算;計数)
要約
【課題】スポーツのフィールドを含む広い領域で、対象物の位置を同定することができる位置同定システムを提供する。
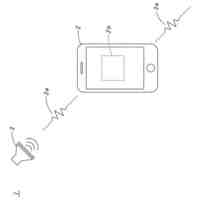
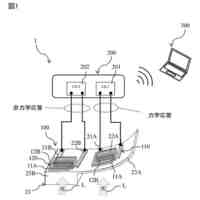
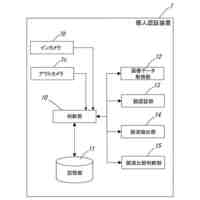
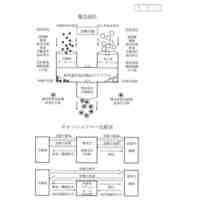
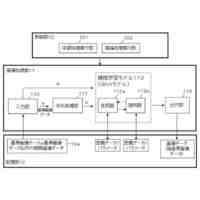
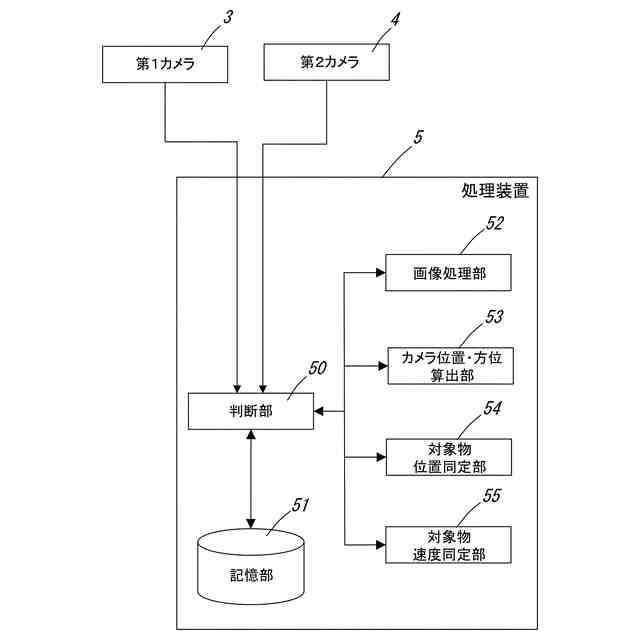
【解決手段】適当位置に第1カメラ3,第2カメラ4を配置する。そして、第1カメラ3,第2カメラ4にて全天球画像を撮像する。この全天球画像には、座標位置が予め定まっている複数のコントロールポイントが含まれている。そして、この全天球画像を用いて、カメラ位置・方位算出部53は、第1カメラ3,第2カメラ4の位置と方位を算出する。この算出した第1カメラ3,第2カメラ4の位置と方位に基づいて、対象物の位置を対象物位置同定部54にいて同定する。
【選択図】図2
特許請求の範囲
【請求項1】
適当位置に配置された全天球カメラと、
前記全天球カメラにて撮像された、座標位置が予め定まっている複数のコントロールポイントを含む全天球画像に基づいて、前記全天球カメラの位置と方位を算出する算出手段と、
前記算出手段にて算出した前記全天球カメラの位置と方位に基づいて、前記全天球カメラにて撮像された対象物の位置を同定する位置同定手段と、を有してなる位置同定システム。
続きを表示(約 320 文字)
【請求項2】
前記位置同定手段にて同定された前記対象物の位置に基づいて、該対象物の速度を同定する速度同定手段を、さらに有してなる請求項1に記載の位置同定システム。
【請求項3】
前記全天球カメラは、鉛直軸方向と平行になるように適当位置に設置されている請求項1又は2に記載の位置同定システム。
【請求項4】
適当位置に配置された全天球カメラにて撮像された、座標位置が予め定まっている複数のコントロールポイントを含む全天球画像に基づいて、前記全天球カメラの位置と方位を算出し、
前記算出した前記全天球カメラの位置と方位に基づいて、前記全天球カメラにて撮像された対象物の位置を同定する位置同定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置同定システム及びその方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、スポーツにおける「情報」が大きな注目を集めている。野球やサッカーを始め、陸上競技、水泳、バスケットボール等、事実上すべてのスポーツ競技において「情報」の価値が注目を集め、多くの研究開発がなされている。例えば、非特許文献1に記載のようなウェアラブルデバイスを用いた技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
"ZXY Arena"、[online]、株式会社ナックイメージテクノロジー、[2024年5月14日検索]、インターネット(https://www.nacinc.jp/analysis/sports-tracking/zxy-arena/)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような技術は、汎用性に乏しく、多くのスポーツの種目に柔軟に適用することができない。さらに、上記のような技術は、設置場所を定め、そこに常設する形での運用が求められることから、非常に限定的な施設で、限定的な運用をせざるを得ないという問題があった。
【0005】
そこで、本発明は、上記問題に鑑み、スポーツのフィールドを含む広い領域で、対象物の位置を同定することができる位置同定システム及びその方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記本発明の目的は、以下の手段によって達成される。なお、括弧内は、後述する実施形態の参照符号を付したものであるが、本発明はこれに限定されるものではない。
【0007】
請求項1に係る位置同定システムは、
適当位置に配置された全天球カメラ(第1カメラ3,第2カメラ4)と、
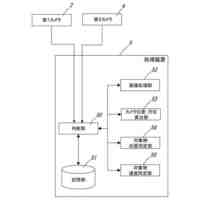
前記全天球カメラにて撮像された、座標位置が予め定まっている複数のコントロールポイント(コントロールポイントP1~P2、コントロールポイントP3~P5)を含む全天球画像に基づいて、前記全天球カメラの位置と方位を算出する算出手段(カメラ位置・方位算出部53)と、
前記算出手段にて算出した前記全天球カメラの位置と方位に基づいて、前記全天球カメラにて撮像された対象物(2)の位置を同定する位置同定手段(対象物位置同定部54)と、を有してなることを特徴としている。
【0008】
請求項2に係る位置同定システムは、上記請求項1に記載の位置同定システムにおいて、前記位置同定手段(対象物位置同定部54)にて同定された前記対象物(2)の位置に基づいて、該対象物(2)の速度を同定する速度同定手段(対象物速度同定部55)を、さらに有してなることを特徴としている。
【0009】
請求項3に係る位置同定システムは、上記請求項1又は2に記載の位置同定システムにおいて、前記全天球カメラ(第1カメラ3,第2カメラ4)は、鉛直軸方向と平行になるように適当位置に設置されていることを特徴としている。
【0010】
請求項4に係る位置同定方法は、
適当位置に配置された全天球カメラ(第1カメラ3,第2カメラ4)にて撮像された、座標位置が予め定まっている複数のコントロールポイント(コントロールポイントP1~P2、コントロールポイントP3~P5)を含む全天球画像に基づいて、前記全天球カメラの位置と方位を算出し(ステップS2)、
前記算出した前記全天球カメラの位置と方位に基づいて、前記全天球カメラにて撮像された対象物(2)の位置を同定する(ステップS3)ことを特徴としている。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人立命館
液面レベルセンサ
3か月前
学校法人立命館
情報埋め込み方法
4か月前
学校法人立命館
バイオ炭の分析方法
3か月前
学校法人立命館
センサ及びセンサシステム
3か月前
学校法人立命館
ロボットハンド制御システム
1か月前
学校法人立命館
位置同定システム及びその方法
3日前
株式会社豊田自動織機
電力変換装置
1か月前
学校法人立命館
フェーズドアレーアンテナ装置及び無線通信装置
5か月前
学校法人立命館
個人認証装置、個人認証方法、個人認証プログラム
4か月前
白山工業株式会社
液体タンクの床板検査用ロボット
3日前
学校法人立命館
処理装置、音響システム、先行音効果を生じさせる方法
2か月前
兵庫県
強化炭素繊維、炭素繊維シート及び炭素繊維強化剤
2か月前
国立大学法人京都大学
近位尿細管生体模倣システム
26日前
国立大学法人 鹿児島大学
生成AIの調整用データのデータ構造、対話システム、調整方法及びプログラム
2か月前
個人
職業自動販売機
24日前
個人
RFタグシート
1か月前
個人
5掛けポイント
1か月前
個人
ペルソナ認証方式
1か月前
個人
情報処理装置
1か月前
個人
自動調理装置
1か月前
個人
立体グラフの利用方法
3日前
個人
農作物用途分配システム
1か月前
個人
サービス情報提供システム
26日前
個人
タッチパネル操作指代替具
1か月前
NISSHA株式会社
入力装置
4日前
個人
インターネットの利用構造
1か月前
個人
スケジュール調整プログラム
1か月前
個人
携帯端末障害問合せシステム
1か月前
個人
学習用データ生成装置
5日前
個人
エリアガイドナビAIシステム
1か月前
キヤノン株式会社
情報処理装置
1か月前
キラル株式会社
顧客体験提供システム
6日前
トヨタ自動車株式会社
通知装置
1か月前
キヤノン株式会社
画像認識装置
18日前
キヤノン株式会社
情報処理装置
18日前
キヤノン株式会社
情報処理装置
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ