TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025176357
公報種別
公開特許公報(A)
公開日
2025-12-04
出願番号
2024082451
出願日
2024-05-21
発明の名称
ツールアダプターおよび自動工具交換装置
出願人
ニッタ株式会社
代理人
弁理士法人ドライト国際特許事務所
主分類
B25J
15/04 20060101AFI20251127BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームのジョイント回りにロボットツールから作用するモーメントの低減に貢献することができるツールアダプターを提供する。
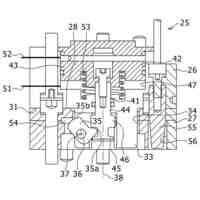
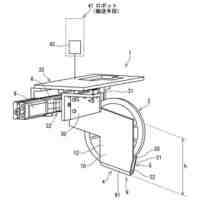
【解決手段】自動工具交換装置25のツールアダプター27は、ロボットツールに結合されて、ロボットアームに結合されるロボットアダプター26に着脱自在に結合される。ツールアダプター27は、第1強度の固体材から形成され、ロボットアダプター26に連結される連結面28を有する上ハウジング61と、第1強度よりも小さい第2強度の固体材から形成され、上ハウジング61に結合されて、ロボットツールにロボットツールの接続品を接続する下ハウジング62と、上ハウジング61に下方から受け止められて、ロボットアダプター26に連結面28を押し当てる押さえ力をロボットアダプター26のカム部材35から上ハウジング61に伝えるロックパーツ54とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットツールに結合されて、ロボットアームに結合されるロボットアダプターに着脱自在に結合されるツールアダプターであって、
第1強度の固体材から形成され、下方から前記ロボットアダプターに連結される上向きの連結面を有する上ハウジングと、
前記第1強度よりも小さい第2強度の固体材から形成され、下方から前記上ハウジングに結合されて、下方から結合される前記ロボットツールに前記ロボットツールの接続品を接続する下ハウジングと、
前記上ハウジングに下方から受け止められて、前記ロボットアダプターに前記連結面を押し当てる押さえ力を前記ロボットアダプターのカムから前記上ハウジングに伝えるロックパーツと
を備えるツールアダプター。
続きを表示(約 500 文字)
【請求項2】
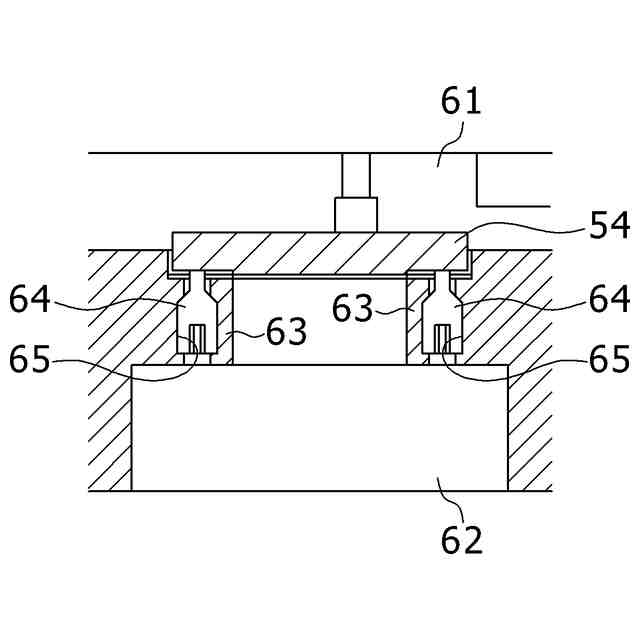
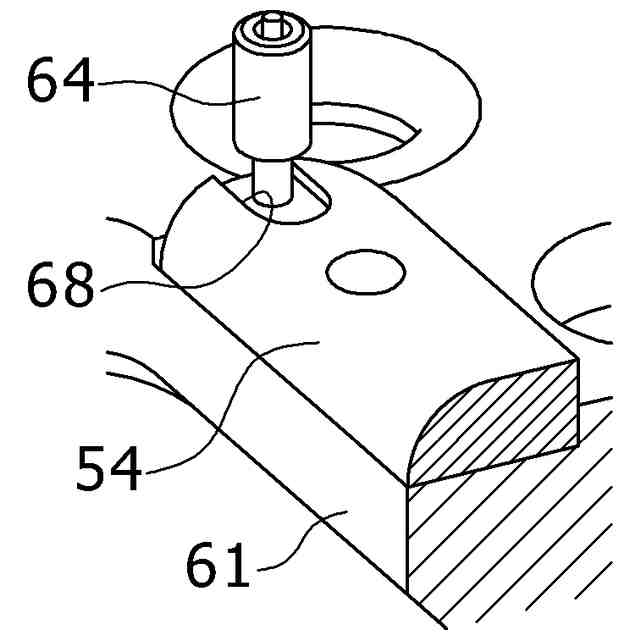
前記カムの通り道を確保する間隔で離れて前記下ハウジングに形成され、下方から前記ロックパーツに先端で当たって前記ロックパーツに拘束力を加える止めねじを支持する支持体を備える
請求項1に記載のツールアダプター。
【請求項3】
前記下ハウジングに形成されて、前記支持体の表面から前記止めねじの軸方向に開放される空間を区画する段差を備える
請求項2に記載のツールアダプター。
【請求項4】
前記ロックパーツには、前記止めねじの先端を受け入れて、前記上ハウジングおよび前記下ハウジングの間から前記ロックパーツの抜け落ちを防止する溝が形成される
請求項2に記載のツールアダプター。
【請求項5】
前記連結面には、前記ロボットアダプターが前記連結面に受け止められる際に前記ロボットアダプターから起立する位置決めピンを受け入れる位置決め孔が形成される
請求項1に記載のツールアダプター。
【請求項6】
請求項1に記載のツールアダプターとロボットアダプターと
を備える自動工具交換装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットツールに結合されて、ロボットアームに結合されるロボットアダプターに着脱自在に結合されるツールアダプターに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
ロボットツールの装着にあたって、ロボットアームにはロボットアダプターが結合される一方で、ロボットツールにはツールアダプターが結合される。ロボットアダプターにツールアダプターが結合されることでロボットツールはロボットアームに固定される。このとき、ロボットアダプターのカムからツールアダプターのロックパーツに押さえ力が作用すると、ロボットアダプターはがたつくことなく連結面上に保持されることができる。ロックパーツはボルトでツールアダプターに固定される。ロックパーツに作用する押さえ力はツールアダプターの母材で支持される。ツールアダプターの母材は例えばアルミニウム材から加工される。アルミニウム材はツールアダプターの軽量化に貢献する。
【先行技術文献】
【特許文献】
【0003】
特許第5697549号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ツールアダプターの母材には連結の維持にあたって大きな押さえ力が作用する。母材には押さえ力を支持する強度が必要なため、相当する厚さとなる。ロックパーツとツールアダプターとはボルトで固定されるため、ツールアダプターの母材の厚みは増大する。母材の厚みに応じてジョイントからロボットツールは遠ざかってしまう。ロボットアームではジョイント回りにロボットツールから作用するモーメントは増大する。
【0005】
本発明は、ロボットアームのジョイント回りにロボットツールから作用するモーメントの低減に貢献することができるツールアダプターを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一形態に係るツールアダプターは、ロボットツールに結合されて、ロボットアームに結合されるロボットアダプターに着脱自在に結合される。ツールアダプターは、第1強度の固体材から形成され、下方から前記ロボットアダプターに連結される上向きの連結面を有する上ハウジングと、前記第1強度よりも小さい第2強度の固体材から形成され、下方から前記上ハウジングに結合されて、下方から結合される前記ロボットツールに前記ロボットツールの接続品を接続する下ハウジングと、前記上ハウジングに下方から受け止められて、前記ロボットアダプターに前記連結面を押し当てる押さえ力を前記ロボットアダプターのカムから前記上ハウジングに伝えるロックパーツと、を備える。
【発明の効果】
【0007】
以上のように本発明の一形態によれば、ロボットアームのジョイント回りにロボットツールから作用するモーメントの低減に貢献することができるツールアダプターは提供されることができる。
【図面の簡単な説明】
【0008】
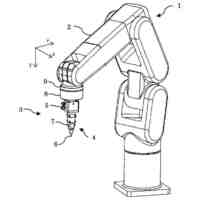
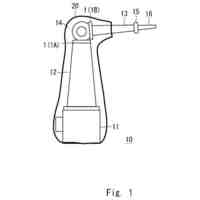
本発明の実施形態に係るロボットの構成を概略的に示す側面図である。
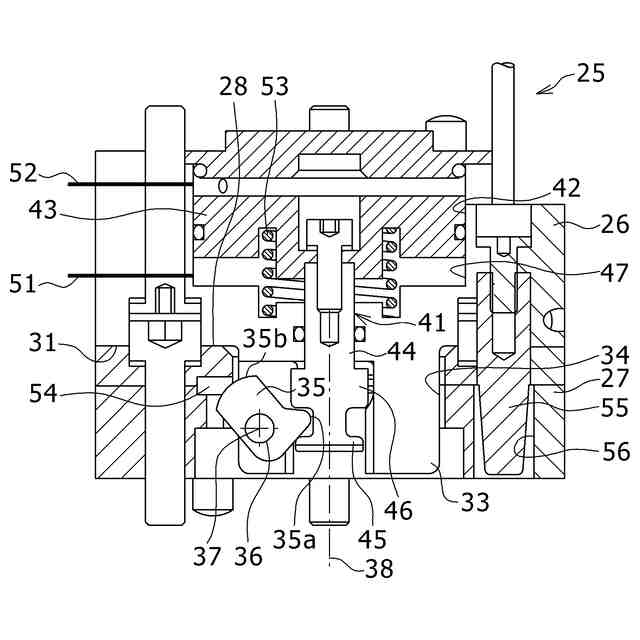
図1の2-2線に沿った自動工具交換装置の拡大断面図であって、ロックパーツにカム面が噛み合った状態を示す図である。
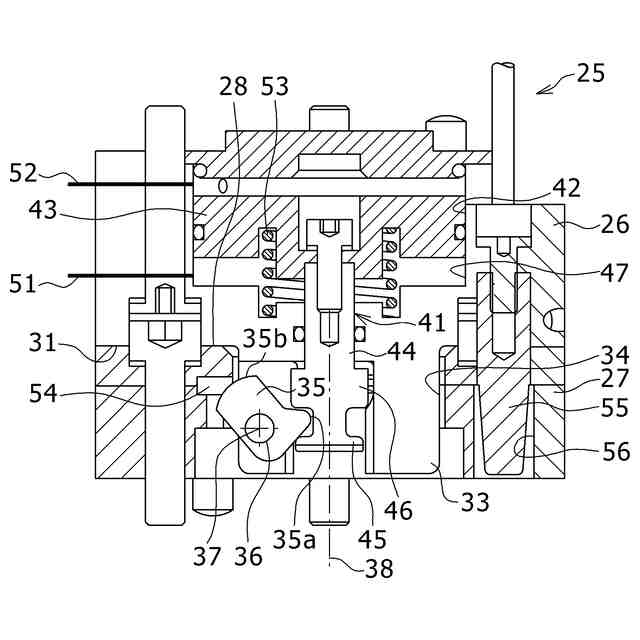
図2に対応し、ロックパーツからカム面が離脱した状態を示す図である。
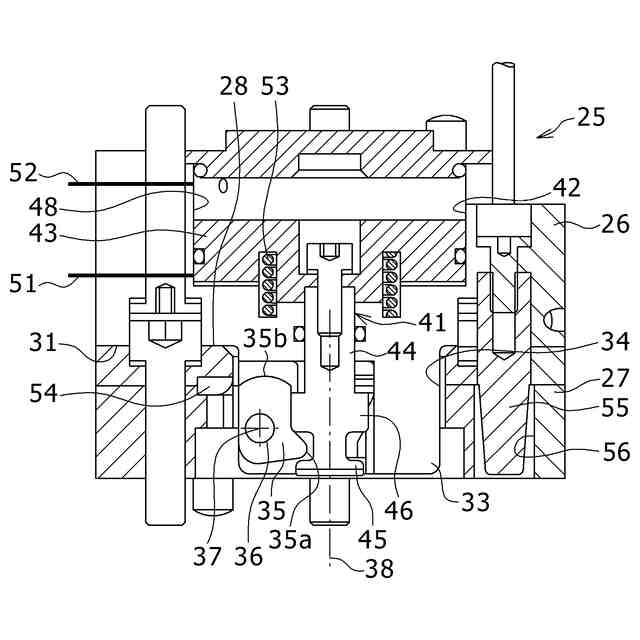
図3に対応し、ツールアダプターからロボットアダプターが切り離される状態を示す図である。
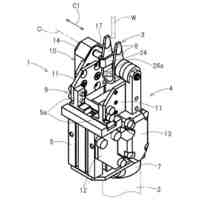
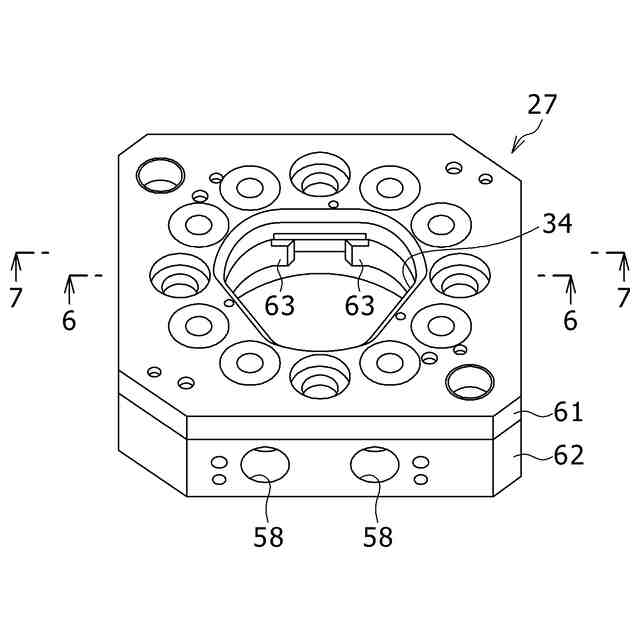
ツールアダプターの外観を概略的に示す拡大斜視図である。
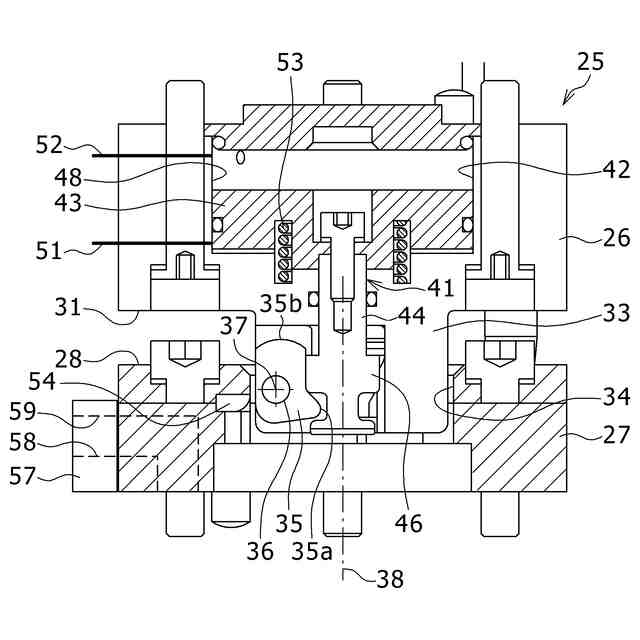
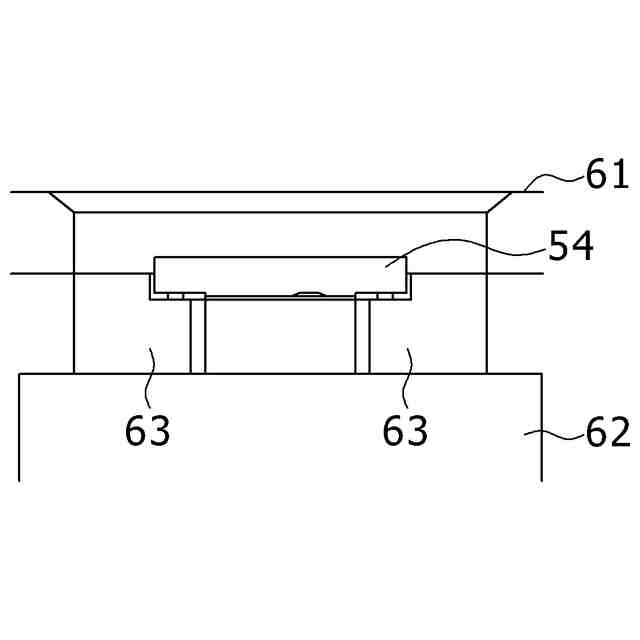
図5の6-6線に沿った拡大断面図に相当し、ロックパーツと上ハウジング並びに下ハウジングとの関係を示す拡大正面図である。
図5の7-7線に沿った拡大断面図に相当し、ロックパーツと止めねじとの関係を示す図である。
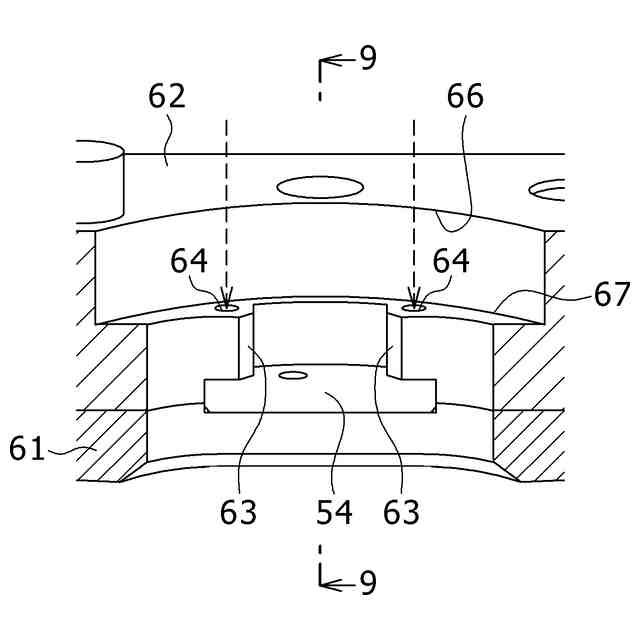
下ハウジング側から観察されるロックパーツを示す拡大斜視図である。
図8の9-9線に沿った断面に相当し、ロックパーツに刻まれた溝を示す拡大斜視図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しつつ本発明の一実施形態を説明する。
【0010】
図1は本発明の一実施形態に係るロボット11の構成を概略的に示す。ロボット11は、例えば床面といった固定面12に固定される台座13と、台座13に第1ジョイント14回りで回転可能に連結されるロボットアーム15とを備える。第1ジョイント14は水平軸線回りでロボットアーム15の回転動作を許容する。ロボットアーム15の回転動作は内蔵される電動モーターの駆動力に基づき実現される。ロボットアーム15の先端にロボットツール16は装着される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ニッタ株式会社
ガイド付ベルト
1か月前
ニッタ株式会社
ツールアダプターおよび自動工具交換装置
4日前
個人
手持ち挟持具
1か月前
CKD株式会社
把持装置
3日前
トヨタ自動車株式会社
学習装置
18日前
ダイセイ株式会社
ロボット自動刻印装置
3日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
瓜生製作株式会社
電動締付工具
11日前
株式会社安川電機
ロボット
1か月前
株式会社マキタ
集塵アタッチメント
10日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社不二越
垂直多関節ロボット
18日前
トヨタ自動車株式会社
ロボットハンド
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
18日前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
NTN株式会社
把持装置
3日前
国立大学法人東京科学大学
多自由度入力装置用制御装置
10日前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
1か月前
株式会社人機一体
有脚ロボット
1か月前
ファナック株式会社
経路データセット生成
1か月前
ダイハツ工業株式会社
ロボット制御システム
3日前
積水ハウス株式会社
固定ピン保持用アタッチメント
1か月前
日本発條株式会社
ケーブルユニット及びその製造方法
1か月前
株式会社デンソー
ワーク投入装置
1か月前
泰芳機械股分有限公司
コレット収納装置
1か月前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
19日前
パナソニック株式会社
インパクト工具
3日前
国立大学法人 東京大学
ロボット及びロボットの投入方法
10日前
トヨタ自動車株式会社
ロボットの保護カバーの挟み込み防止構造
1か月前
工機ホールディングス株式会社
作業機
1か月前
SMC株式会社
チャック装置およびチャックシステム
1か月前
パナソニック株式会社
インパクト回転工具
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ