TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025171574
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024077066
出願日
2024-05-10
発明の名称
作業領域推定方法、作業領域推定システム及び作業領域推定プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
工藤・狩野国際弁理士法人
主分類
G06Q
50/02 20240101AFI20251113BHJP(計算;計数)
要約
【課題】圃場のうち、非作業領域を検出して作業領域を精度よく推定する。
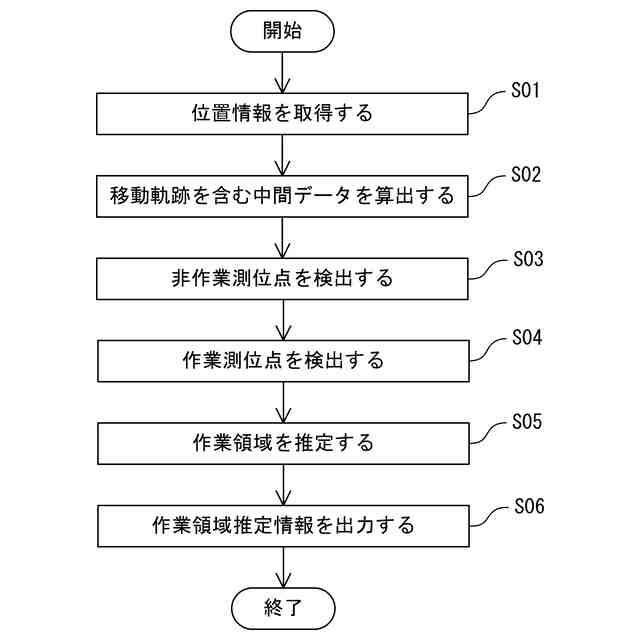
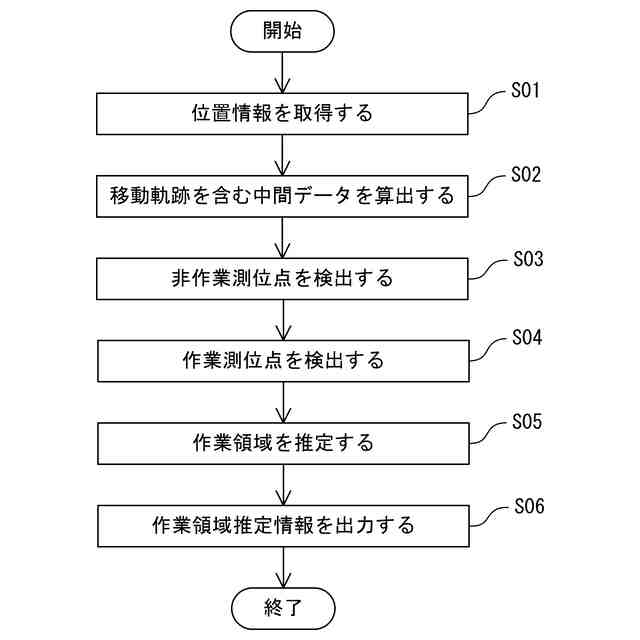
【解決手段】作業領域推定方法は、圃場(9)内で移動しながら作業を行う作業装置(2)の位置を複数の測位時刻に測定した位置情報を取得すること(S01)と、位置情報に基づいて、作業装置(2)が圃場(9)内を移動した移動軌跡を含む中間データを算出すること(S02)と、移動軌跡に基づいて、作業装置(2)の位置を測定した測位点のうち、作業装置(2)が圃場(9)内で作業を行った作業領域(91)を除く非作業領域に含まれる非作業測位点を検出すること(S03)と、移動軌跡に基づいて、非作業測位点を除く測位点のうち、作業領域(91)に含まれる作業測位点(7)を検出すること(S04)と、作業測位点(7)に基づいて、作業領域(91)を推定すること(S05)と、を含む。
【選択図】図4
特許請求の範囲
【請求項1】
圃場内で移動しながら作業を行う作業装置の位置を複数の測位時刻に測定した位置情報を取得することと、
前記位置情報に基づいて、前記作業装置が前記圃場内を移動した移動軌跡を算出することと、
前記移動軌跡に基づいて、前記作業装置の前記位置を測定した測位点のうち、前記作業装置が前記圃場内で前記作業を行った作業領域を除く非作業領域に含まれる非作業測位点を検出することと、
前記移動軌跡に基づいて、前記非作業測位点を除く前記測位点のうち、前記作業領域に含まれる作業測位点を検出することと、
前記作業測位点に基づいて、前記作業領域を推定することと、
推定した前記作業領域を表す作業領域推定情報を外部に出力することと、
を含む
作業領域推定方法。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の作業領域推定方法において、
前記位置情報に含まれるそれぞれの前記測位点における移動方角を算出することと、
前記移動方角の分布に基づいて、前記圃場に設けられた畝が延在する畝方角を推定することと、
をさらに含み、
前記作業領域を推定することは、
前記畝方角にさらに基づいて前記作業領域を推定すること
を含む
作業領域推定方法。
【請求項3】
請求項2に記載の作業領域推定方法において、
前記非作業測位点を検出することは、
前記測位点のうち、前記移動方角の前記畝方角との角度が所定の閾値より大きい前記測位点を、前記非作業測位点として検出すること
を含む
作業領域推定方法。
【請求項4】
請求項2に記載の作業領域推定方法において、
前記移動方角に基づいて、前記移動軌跡のうち、前記作業装置が移動方向を反転して後退した後退区間を検出すること
をさらに含み、
前記非作業測位点を検出することは、
前記測位点のうち、前記後退区間に含まれる前記測位点を、前記非作業測位点として検出すること
を含む
作業領域推定方法。
【請求項5】
請求項2に記載の作業領域推定方法において、
前記畝方角に基づいて、前記移動軌跡のうち、前記作業装置が畝に沿って移動しながら前記作業を行った区間を、畝ライン候補として検出することと、
前記畝ライン候補のうち、前記畝方角に直交する距離が所定の閾値長さより短い前記畝ライン候補の対を、管理通路として検出することと、
前記測位点のうち、前記管理通路に含まれる前記測位点を、前記非作業測位点として検出することと、
をさらに含む
作業領域推定方法。
【請求項6】
請求項5に記載の作業領域推定方法において、
前記作業領域を推定することは、
前記畝ライン候補から前記管理通路を除いた畝ラインのそれぞれにおいて、前記畝方角に直交する距離が最も近い別の前記畝ラインと、注目している前記畝ラインとを、同一の前記作業領域に含まれる畝ラインの集合として設定することと、
前記畝ラインの前記集合のそれぞれにおいて、注目している前記畝ラインの前記集合に含まれる前記作業測位点の集合に対する凸包処理又は凹包処理によって前記作業領域を推定することと、
を含む
作業領域推定方法。
【請求項7】
請求項6に記載の作業領域推定方法において、
前記作業領域を推定することは、
前記凸包処理又は前記凹包処理によって算出したポリゴンを、前記畝ラインの距離に基づいて前記畝方角に直交する方向に拡張すること
をさらに含む
作業領域推定方法。
【請求項8】
請求項7に記載の作業領域推定方法において、
前記作業領域を推定することは、
前記凸包処理又は前記凹包処理によって算出した前記ポリゴンを、株間の距離に基づいて前記畝方角の方向に拡張すること
をさらに含む
作業領域推定方法。
【請求項9】
請求項1に記載の作業領域推定方法において、
前記位置情報に含まれる前記測位点のそれぞれにおける前記作業装置の移動速度を算出すること
をさらに含み、
前記非作業測位点を検出することは、
前記測位点のうち、前記移動速度が所定の速度範囲から外れる前記測位点を、前記非作業測位点として検出すること
を含む
作業領域推定方法。
【請求項10】
圃場内で移動しながら作業を行う作業装置の位置を複数の測位時刻に測定した位置情報を取得する位置情報取得部と、
前記位置情報に基づいて、前記作業装置が前記圃場内を移動した移動軌跡を含む中間データを算出する中間データ算出部と、
前記移動軌跡に基づいて、前記作業装置の前記位置を測定した測位点のうち、前記作業装置が前記圃場内で前記作業を行った作業領域を除く非作業領域に含まれる非作業測位点を検出する非作業測位点検出部と、
前記移動軌跡に基づいて、前記非作業測位点を除く前記測位点のうち、前記作業領域に含まれる作業測位点を検出する作業測位点検出部と、
前記作業測位点に基づいて、前記作業領域を推定する作業領域推定部と、
推定した前記作業領域を表す作業領域推定情報を外部に出力する出力部と、
を備える
作業領域推定システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は作業領域推定方法、作業領域推定システム及び作業領域推定プログラムに関し、例えば、圃場で作業装置が実際に作業を行った作業領域を推定するために好適に利用できるものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1(特開2023-89588号公報)には、作業車両が移動しながら農作業を行った作業領域の形状を推測する作業領域管理方法が開示されている。この作業領域管理方法では、作業車両が農作業を行いながら通過した位置を逐一測定して得られた測位点の点群を対象に凸包処理又は凹包処理を施すことで、作業領域を推測する。作業領域を推測することで、作業領域における単位面積当たりの作業効率や生産量などを算出することができるので、作業領域を含む圃場を評価したり、その後の作業計画に反映させたりすることができる。
【0003】
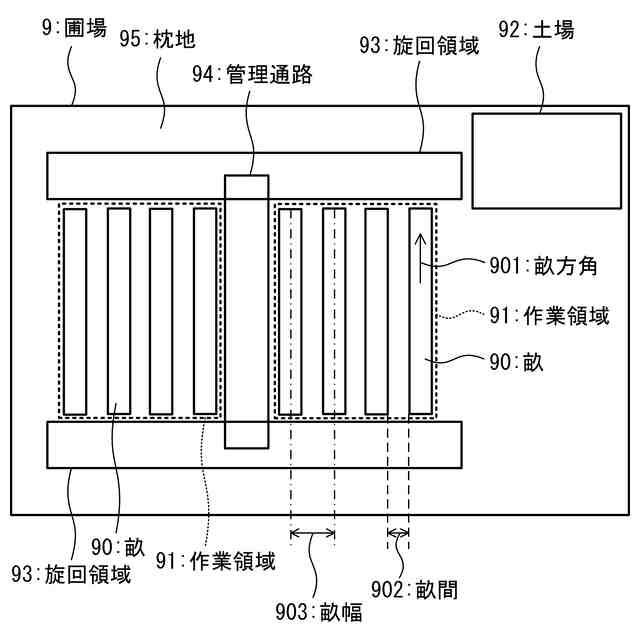
しかしながら、上記のように得られる測位点には、作業車両が農作業を行わずに通過した位置も含まれ得る。例えば、作業車両は、農作業の途中で、圃場内のうち、作物を栽培する作業領域以外の非作業領域も通過し得る。非作業領域には、枕地のように作業車両が旋回するために使用する場所や、収穫した作物を圃場に横付けした運搬車に移し替えるための場所や、農薬や肥料などの補充を行うための場所などが含まれる。推測した作業領域にこれらの非作業領域が含まれると、単位面積当たりの作業効率や生産量などの算出に無視できない誤差が生じ得る。
【先行技術文献】
【特許文献】
【0004】
特開2023-89588号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記状況に鑑み、本開示は、圃場のうち、非作業領域を検出して作業領域を精度よく推定するための作業領域推定方法、作業領域推定システム及び作業領域推定プログラムを提供することを目的の1つとする。その他の課題と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【課題を解決するための手段】
【0006】
以下に、発明を実施するための形態で使用される番号・符号を用いて、課題を解決するための手段を説明する。これらの番号・符号は、特許請求の範囲の記載と発明を実施するための形態との対応関係の一例を示すために、参考として、括弧付きで付加されたものである。よって、括弧付きの記載により、特許請求の範囲は、限定的に解釈されるべきではない。
【0007】
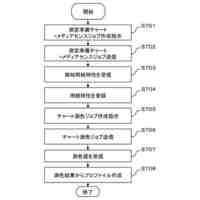
一実施の形態によれば、作業領域推定方法は、圃場(9)内で移動しながら作業を行う作業装置(2)の位置を複数の測位時刻に測定した位置情報を取得すること(S01)を含む。作業領域推定方法は、位置情報に基づいて、作業装置(2)が圃場(9)内を移動した移動軌跡を含む中間データを算出すること(S02)をさらに含む。作業領域推定方法は、移動軌跡に基づいて、作業装置(2)の位置を測定した測位点のうち、作業装置(2)が圃場(9)内で作業を行った作業領域(91)を除く非作業領域に含まれる非作業測位点を検出すること(S03)をさらに含む。作業領域推定方法は、移動軌跡に基づいて、非作業測位点を除く測位点のうち、作業領域(91)に含まれる作業測位点(7)を検出すること(S04)をさらに含む。作業領域推定方法は、作業測位点(7)に基づいて、作業領域(91)を推定すること(S05)をさらに含む。作業領域推定方法は、推定した作業領域(91)を表す作業領域推定情報を外部に出力すること(S06)をさらに含む。
【0008】
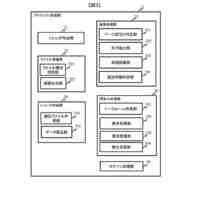
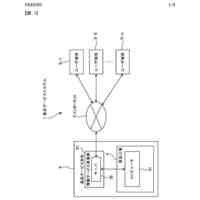
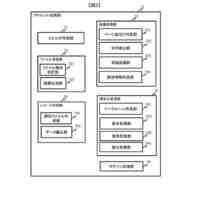
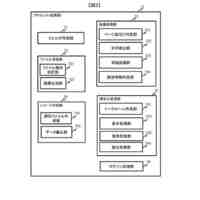
一実施の形態によれば、作業領域推定システム(1)は、位置情報取得部(421)と、中間データ算出部(422)と、非作業測位点検出部(423)と、作業測位点検出部(424)と、作業領域推定部(425)と、出力部(426)とを備える。位置情報取得部(421)は、圃場(9)内で移動しながら作業を行う作業装置(2)の位置を複数の測位時刻に測定した位置情報を取得する。中間データ算出部(422)は、位置情報に基づいて、作業装置(2)が圃場(9)内を移動した移動軌跡を含む中間データを算出する。非作業測位点検出部(423)は、移動軌跡に基づいて、作業装置(2)の位置を測定した測位点のうち、作業装置(2)が圃場(9)内で作業を行った作業領域(91)を除く非作業領域に含まれる非作業測位点を検出する。作業測位点検出部(424)は、移動軌跡に基づいて、非作業測位点を除く測位点のうち、作業領域(91)に含まれる作業測位点(7)を検出する。作業領域推定部(425)は、作業測位点(7)に基づいて、作業領域(91)を推定する。出力部(426)は、推定した作業領域(91)を表す作業領域推定情報を外部に出力する。
【0009】
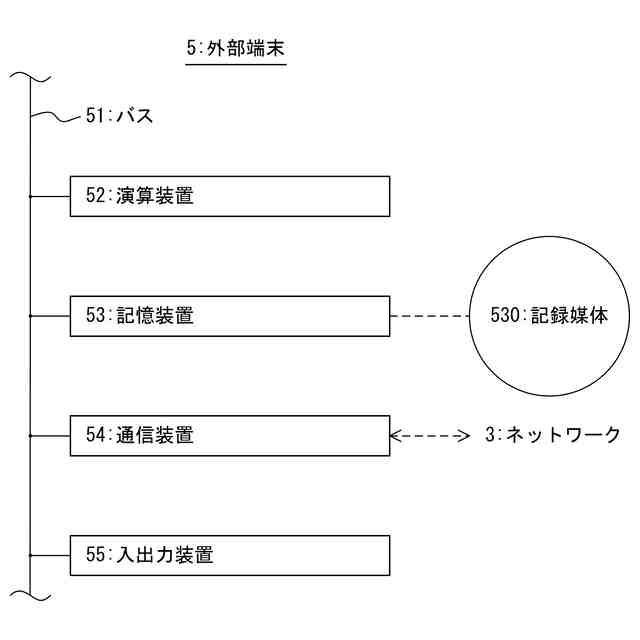
一実施の形態によれば、作業領域推定プログラムは、演算装置に実行させることによって所定の処理を実現する。この処理は、圃場(9)内で移動しながら作業を行う作業装置(2)の位置を複数の測位時刻に測定した位置情報を取得すること(S01)を含む。この処理は、位置情報に基づいて、作業装置(2)が圃場(9)内を移動した移動軌跡を含む中間データを算出すること(S02)をさらに含む。この処理は、移動軌跡に基づいて、作業装置(2)の位置を測定した測位点のうち、作業装置(2)が圃場(9)内で作業を行った作業領域(91)を除く非作業領域に含まれる非作業測位点を検出すること(S03)をさらに含む。この処理は、移動軌跡に基づいて、非作業測位点を除く測位点のうち、作業領域(91)に含まれる作業測位点(7)を検出すること(S04)をさらに含む。この処理は、作業測位点(7)に基づいて、作業領域(91)を推定すること(S05)をさらに含む。この処理は、推定した作業領域(91)を表す作業領域推定情報を外部に出力すること(S06)をさらに含む。
【発明の効果】
【0010】
一実施の形態によれば、圃場のうち、非作業領域を検出して作業領域を精度よく推定することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
詐欺保険
1か月前
個人
縁伊達ポイン
1か月前
個人
RFタグシート
24日前
個人
職業自動販売機
6日前
個人
5掛けポイント
13日前
個人
QRコードの彩色
1か月前
個人
ペルソナ認証方式
21日前
個人
地球保全システム
1か月前
個人
情報処理装置
16日前
個人
自動調理装置
23日前
個人
農作物用途分配システム
1か月前
個人
表変換編集支援システム
2か月前
個人
残土処理システム
1か月前
個人
サービス情報提供システム
8日前
個人
インターネットの利用構造
20日前
個人
タッチパネル操作指代替具
1か月前
個人
知的財産出願支援システム
1か月前
個人
スケジュール調整プログラム
29日前
個人
携帯端末障害問合せシステム
29日前
個人
パスワード管理支援システム
2か月前
個人
エリアガイドナビAIシステム
21日前
株式会社キーエンス
受発注システム
1か月前
個人
食品レシピ生成システム
1か月前
個人
AIキャラクター制御システム
2か月前
個人
海外支援型農作物活用システム
2か月前
個人
システム及びプログラム
2か月前
株式会社キーエンス
受発注システム
1か月前
株式会社キーエンス
受発注システム
1か月前
株式会社ワコム
電子ペン
15日前
キヤノン株式会社
印刷システム
29日前
個人
帳票自動生成型SaaSシステム
1か月前
エッグス株式会社
情報処理装置
1か月前
株式会社ワコム
電子ペン
15日前
個人
社会還元・施設向け供給支援構造
2か月前
個人
人格進化型対話応答制御システム
2か月前
キヤノン株式会社
表示システム
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ